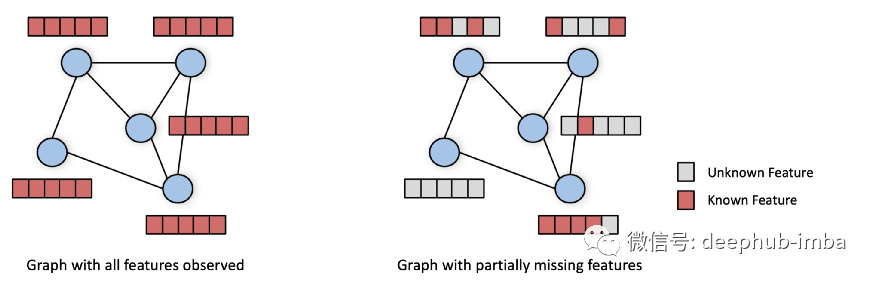
使用特征传播重构缺失数据进行图机器学习
本文种展示的特征传播是一种用于处理图机器学习应用程序中缺失的特征的有效且可扩展的方法。它很简单,但效果出奇地好。
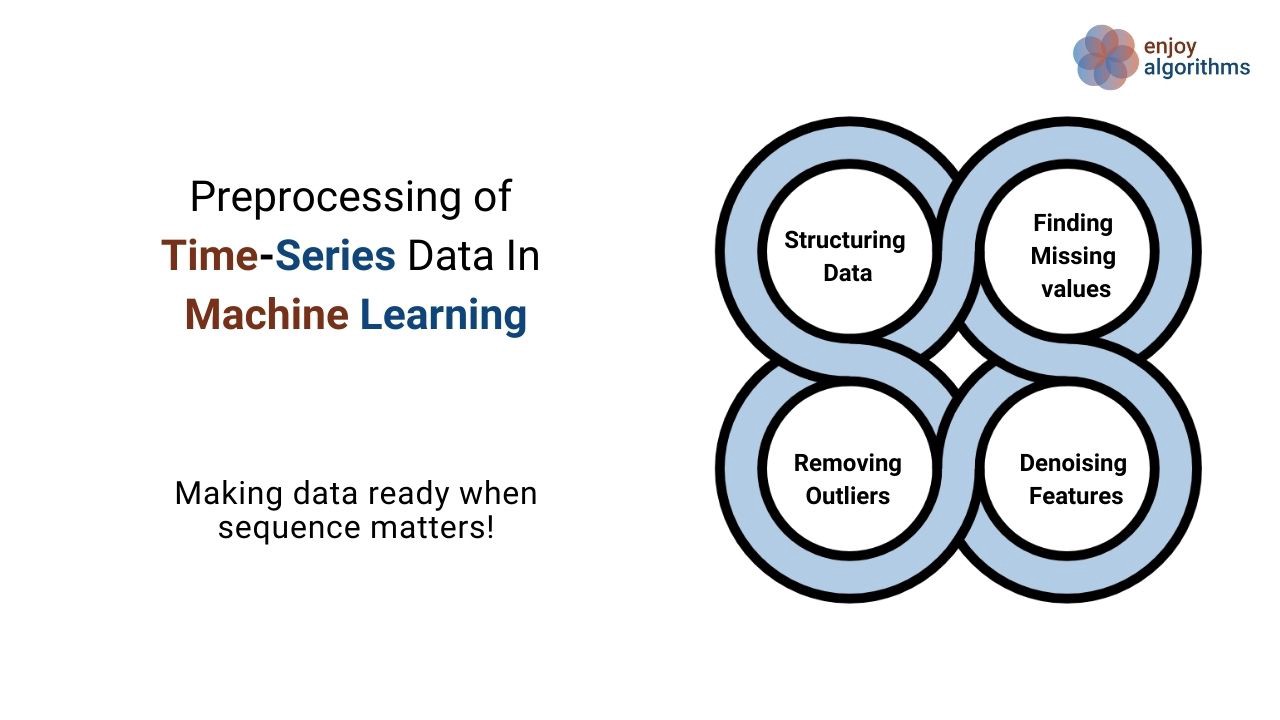
时间序列数据的预处理
在本文中,我们将看到在深入研究数据建模部分之前应执行的常见时间序列预处理步骤和与时间序列数据相关的常见问题。
如何将pytorch模型部署到安卓
如何将pytorch模型部署到安卓上这篇文章演示如何将训练好的pytorch模型部署到安卓设备上。我也是刚开始学安卓,代码写的简单。环境:pytorch版本:1.10.0模型转化pytorch_android支持的模型是.pt模型,我们训练出来的模型是.pth。所以需要转化才可以用。先看官网上给的转
NumPy快速入门(四)——随机抽样与通用函数
目录一、随机抽样(np.random模块)1.1 np.random.random()1.2 np.random.uniform()1.3 np.random.randn()1.4 np.random.randint()1.5 np.random.rand()1.6 np.random.normal
基础工资提高至35万美元、带薪病假天数翻倍,亚马逊、苹果为留人才又出新动作
文中的员工福利有吸引到你吗?
机器学习分类算法之Logistic 回归(逻辑回归)
目录什么是逻辑回归?Sigmoid 函数似然函数梯度下降判定边界损失函数逻辑回归优点逻辑回归缺点代码实现Logistic Regression参数详解正则化选择参数:penalty优化算法选择参数:solver其他参数代码案例结果显示每文一语什么是逻辑回归?逻辑回归算法是用来解决分类问题的。回归与分
用普通摄像头测量距离
近年来,由于无人机、无人车等技术的不断成熟,需要用到实时测距的场所也越来越多,如定位,避障,测速等,相比于其他测距方法,单目测距是利用一个摄像头进行视频拍摄,在图像中找到待测物体。这一系列动作,涉及到了物体的识别,相机的结构,坐标变换的一些知识,距离的获取是一个很广泛的课题,用摄像头来测距是其中一个
90后MIT博士开源创业再获5千万美元融资,进军3D数字内容创作者工具
“信息技术奥林匹克大赛获奖”,“保送清华姚班”,“麻省理工博士”,“创业公司CEO”,这一组词汇对于大多数人来说仿佛都是可望而不可及的存在,个个都是如此地令人惊叹,随便沾上一个就能走上人生巅峰。但是偏偏能有这么一个人,集“巅峰”于一身,那就是「太极图形」创始人 – 胡渊鸣。春节后,胡渊明和他的团队官

8个可以提高数据科学工作效率、节省宝贵时间的Python库
在进行数据科学时,可能会浪费大量时间编码并等待计算机运行某些东西。所以我选择了一些 Python 库,可以帮助你节省宝贵的时间。
线性回归的基本概念以及正规方程
本文属于线性回归算法【AIoT阶段三】(尚未更新),这里截取自其中一段内容,线性回归是机器学习中有监督机器学习下的一种算法。 回归问题主要关注的是因变量(需要预测的值,可以是一个也可以是多个)和一个或多个数值型的自变量(预测变量)之间的关系。需要预测的值:即目标变量,target,y,连续值预测变量
RISC-V “异军”突起,英特尔:消灭不了就加入它
你认为这意味着什么?
各种距离概念与计算公式
对各种常用的距离的概念和计算公式的汇总整理
1.k-近邻算法(KNN)
概念根据你的“邻居”判断你的类别流程KNN api 初步使用机器学习流程Scikit-learn工具安装pip3 install scikit-learn==0.19.1注:需要Numpy,Scipy等库的支持Python (>= 3.5),NumPy (>= 1.11.0),SciPy
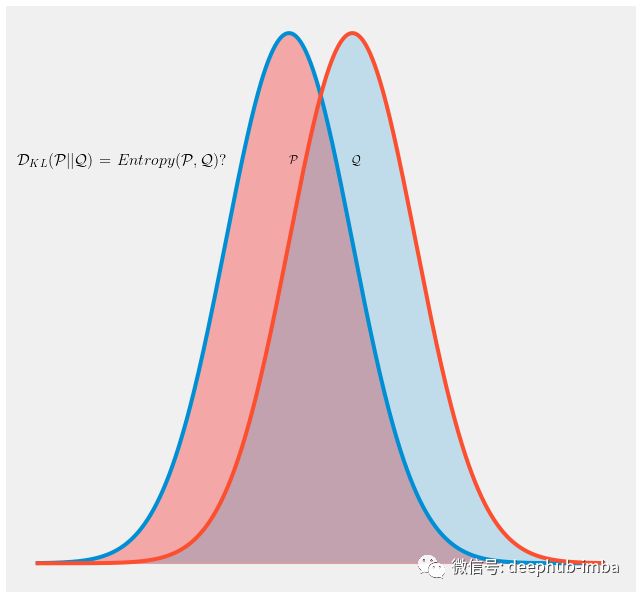
为什么交叉熵和KL散度在作为损失函数时是近似相等的
在本文中,我们将介绍熵、交叉熵和 Kullback-Leibler Divergence [2] 的概念,并了解如何将它们近似为相等。
【人脸识别系列】| 实现人脸截图保存并编写128维特征向量
目录前情提要PIL导入人脸编码函数——face_encodings切割具体代码MainTest3结果展示总结前情提要通过上一篇我们就可以对图片中的人脸进行识别,这篇文章就来教大家怎么对人脸部分进行截取保存。并且将图片中的每张人脸编码成一个128维长度的向量,通过这个后续能在人脸之间进行比对。PIL导
程序员的数学【线性代数基础】
本文其实值属于:程序员的数学【AIoT阶段二】 (尚未更新)的一部分内容,本篇把这部分内容单独截取出来,方便大家的观看,本文介绍 线性代数基础,在机器学习中经常会有矩阵、向量的定义以及计算,是公式定义、推导中必不可少的一部分内容,很多基础概念的定义中都用到了向量的概念,有关线性代数,后续还会发一篇博
机器学习分类算法之支持向量机
目录支持向量机算法背景介绍什么是线性可分?什么又是超平面?支持向量机的三种情况近线性可分线性不可分不用核函数的传统方法核函数Kernel是什么?核函数SVM求解过程核函数的本质代码实例模型调参gamma调参C值调参使用Polynomial kernel进行预测使用RBF kernel进行预测总结每文
智慧停车场-车牌识别自动计费系统
这篇文章就利用华为云的人工智能分类里的车牌号识别接口,快速搭建一个停车场自动收费系统,硬件采用树莓派开发板,摄像头采用普通的免驱USB摄像头,使用超声波测距模块检测是否有车辆靠近,车牌识别接口采用的是在线的方式;软件后台、UI界面采用QT、C++设计,支持跨平台,比较方便,代码一次写完,主流平台都可



