人工智能智能决策支持系统:技术、特点和挑战
机器学习:机器学习是一种人工智能技术,通过训练模型,让模型从数据中学习规律,并自动调整模型参数,从而实现对决策问题的分析和预测。深度学习:深度学习是一种更加先进的机器学习技术,通过多层神经网络的训练,可以实现更加复杂的特征提取和特征表示,从而实现更加准确的分析和预测。自然语言处理:自然语言处理是一种
【人工智能的数学基础】什么是交叉熵损失函数?逻辑回归的损失函数数学表达式,并用具体的计算实例来说明
逻辑回归中用到的损失函数是交叉熵损失函数。交叉熵损失函数是一种用于衡量分类模型预测结果和真实标签之间的差距的损失函数,通常用于二分类问题。对于逻辑回归,我们希望模型能够输出一个概率值,表示样本属于正例的概率。hθx11e−θTxhθx1e−θTx1其中,θ\thetaθ是模型的参数,xxx是样本
AI工程化—— 如何让AI在企业多快好省的落地?
反过来看,利用工程化技术去优化模型的自学习能力,能让模型保持持续更新、迭代和演进,随着数据和业务的变化不断进行自适应,避免衰退,始终保持在最佳状态,为业务场景带来更好的效果、更多的价值。本书作者根据自己多年在软件研发、运维、DevOps和机器学习等领域的从业经验,对MLOps这一新生事物的原理和工具
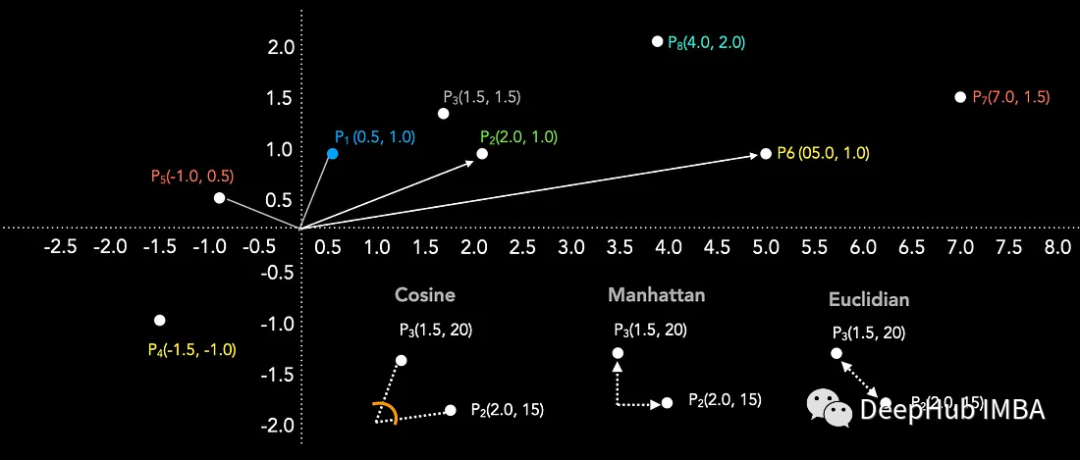
常用的相似度度量总结:余弦相似度,点积,L1,L2
本文将介绍几种常用的用来计算两个向量在嵌入空间中的接近程度的相似性度量。
2023 最值得学习的AI人工智能、ML机器学习编程语言
与上面提到的顶级 ML 语言相比,Wolfram 语言的流行度和普及率甚至还不到一半,但它在机器学习的某些特定操作方面仍然被认为是出色的。在这些组件中,输入是加载到机器中用于训练的数据集,根据特定 ML 模型的目的,它可以包括文本、图像、视频等形式的统计数据、策略、推理等。这种最好的机器学习语言伴随
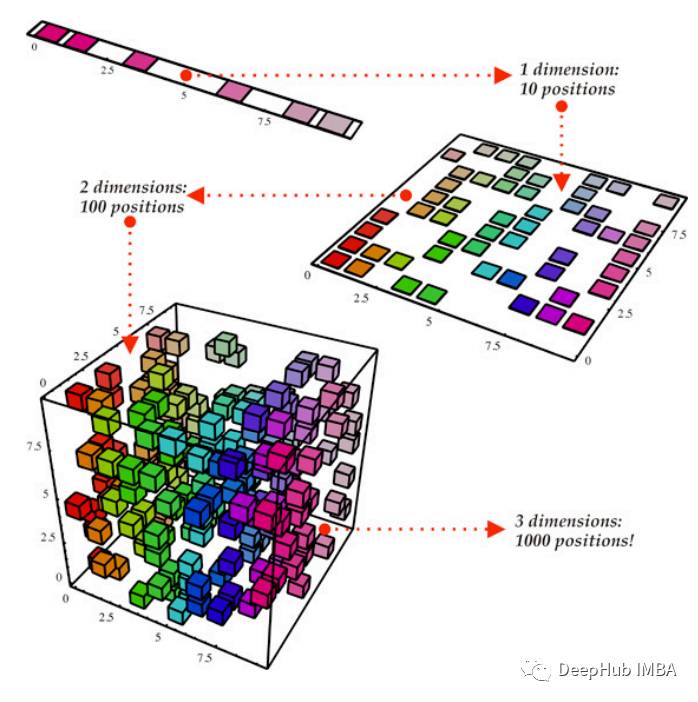
三个主要降维技术对比介绍:PCA, LCA,SVD
本文将深入研究三种强大的降维技术——主成分分析(PCA)、线性判别分析(LDA)和奇异值分解(SVD)。我们不仅介绍这些方法的基本算法,而且提供各自的优点和缺点。
人工智能大模型(LLM)的核心能力、具体的应用场景和具体的落地步骤
零样本学习能力是指模型在没有人工干预的情况下,可以通过大规模数据的学习,自动掌握各类任务的知识和规律,并进行准确的预测和推理。在众多的自然语言处理任务中,语言模型被广泛应用于机器翻译、问答系统、文本摘要、对话系统等,这些任务需要模型理解人类语言的语义和上下文信息,并进行准确的预测和生成。以上为人工智
AGI 通用人工智能的未来展望
通用人工智能(Artificial General Intelligence,AGI),也叫超级智能(Superintelligence),是指具备与人类智力水平相当或超过人类智力水平的人工智能系统。通用人工智能不仅能够完成特定任务,也可以像人类一样进行思考、判断和学习,甚至超过人类智力水平去解决更
Py之pymc:pymc的简介、安装、使用方法之详细攻略
Py之pymc:pymc的简介、安装、使用方法之详细攻略目录pymc的简介pymc的安装pymc的使用方法pymc的简介 PyMC(以前称为PyMC3)是一个专注于高级马尔科夫链蒙特卡洛(MCMC)和变分推断(VI)算法的Python包,用于贝叶斯统计建模。其灵活性和可扩展性使其适用于各种问题
【人工智能】神经元数学模型的基本方程式及其意义详细说明
本文中讨论的四个典型模型——Hodgkin-Huxley模型、Integrate-and-Fire模型、Izhikevich模型和Kuramoto模型——在某种程度上反映神经元及其网络的一些基本特性和相互作用。Izhikevich模型相对于Integrate-and-Fire的关注点,更为经典的Ho
归一化(Normalization)
归一化是一种数据处理方式,能将数据经过处理后限制在某个固定范围内。归一化存在两种形式,一种是在通常情况下,将数处理为 [0, 1] 之间的小数,其目的是为了在随后的数据处理过程中更便捷。例如,在图像处理中,就会将图像从 [0, 255] 归一化到 [0, 1]之间,这样既不会改变图像本身的信息储存,
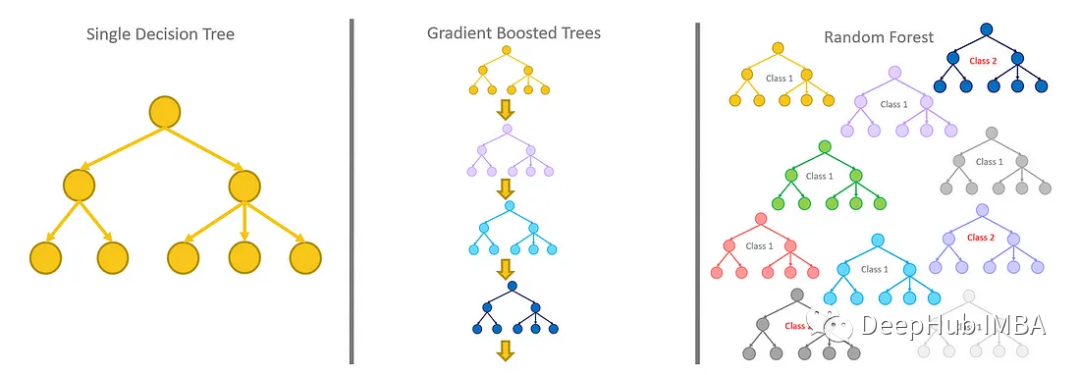
XGBoost 2.0:对基于树的方法进行了重大更新
XGBoost是处理不同类型表格数据的最著名的算法,LightGBM 和Catboost也是为了修改他的缺陷而发布的。9月12日XGBoost发布了新的2.0版,本文除了介绍让XGBoost的完整历史以外,还将介绍新机制和更新。
解决‘function‘ object has no attribute ‘data‘
function对象没有data属性。
头歌--机器学习之决策树
1、下列说法正确的是?(AB)A、训练决策树的过程就是构建决策树的过程B、ID3算法是根据信息增益来构建决策树C、C4.5算法是根据基尼系数来构建决策树D、决策树模型的可理解性不高2、下列说法错误的是?(B)A、从树的根节点开始,根据特征的值一步一步走到叶子节点的过程是决策树做决策的过程B、决策树只
深度学习中常用的损失函数(一) —— MSELoss()
MSELoss() 损失函数学习笔记
华为开源自研AI框架昇思MindSpore应用案例:分布式并行训练基础样例(CPU)
华为开源自研AI框架昇思MindSpore应用案例:分布式并行训练基础样例
使用python实现LDA线性判别分析
LDA(Linear Discriminant Analysis)线性判别分析是一种监督学习的线性分类算法,它可以将一个样本映射到一条直线上,从而实现对样本的分类。LDA的目标是找到一个投影轴,使得经过投影后的两类样本之间的距离最大,而同一类样本之间的距离最小。LDA的过程可以分为以下几步:1.计算
【人工智能】大模型与数据、信息、知识、智慧的关系和本质
综上所述,大模型与数据、信息、知识、智慧之间存在着密切的关系和相互作用。只有充分利用这些资源,才能设计和应用出更加优秀和高效的大模型,从而推动人工智能技术的发展和应用。
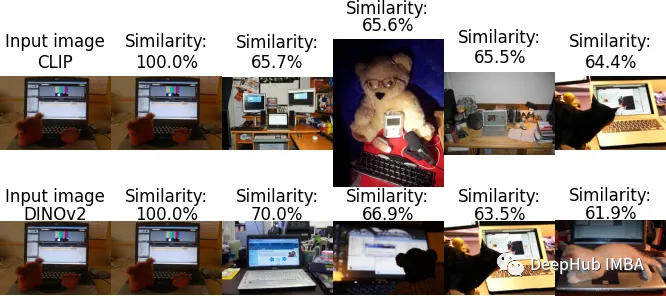
CLIP与DINOv2的图像相似度对比
在本文中,我们将探讨CLIP和DINOv2的优势和它们直接微妙的差别。我们的目标是发现哪些模型在图像相似任务中真正表现出色。
线性判别分析(LDA)详解
入门小菜鸟,希望像做笔记记录自己学的东西,也希望能帮助到同样入门的人,更希望大佬们帮忙纠错啦~侵权立删。目录一、LDA简介二、数学原理(以二分类为例子)1、设定2、每一类的均值和方差3、目标函数4、目标函数的求解三、多分类LDA四、LDA用途与优缺点1、用途2、优点3、缺点五、LDA的python应



