数学建模-2022年亚太赛C题(含思路过程和代码)
数学建模-2022年亚太赛C题(含思路过程和代码)
AI人工智能 最常见的机器学习算法:线性回归、逻辑回归、决策树、随机森林、支持向量机、K近邻和神经网络
本文介绍了AI人工智能最常见的机器学习算法,包括线性回归、逻辑回归、决策树、随机森林、支持向量机、K近邻和神经网络等。这些机器学习算法在不同的应用场景中有着广泛的应用。选择合适的机器学习算法可以提高预测准确率和模型性能。随着机器学习技术的不断发展,相信未来会有更多的机器学习算法出现,为我们的生活带来
人工智能概览
1.人工智能定义2.人工智能发展历史3.人工智能产业生态4.人工智能落地挑战5.人工智能发展趋势
线性回归,核技巧和线性核
在这篇文章中,我想展示一个有趣的结果:线性回归与无正则化的线性核ridge回归是等 价的。
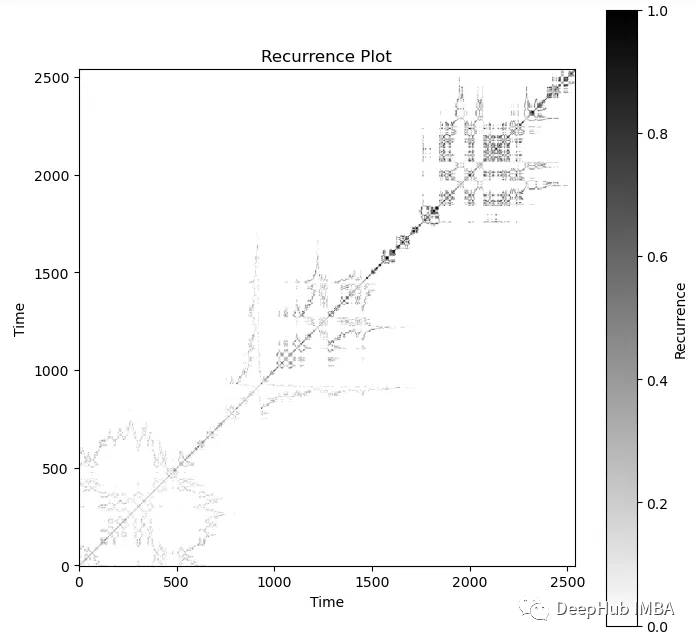
使用递归图 recurrence plot 表征时间序列
在本文中,我将展示如何使用递归图 Recurrence Plots 来描述不同类型的时间序列。
人工智能、机器学习、深度学习的区别
人工智能涵盖范围最广,它包含了机器学习;而机器学习是人工智能的重要研究内容,它又包含了深度学习。
连续型随机变量的分布(均匀分布、指数分布、正态分布)
连续型随机变量的分布(均匀分布、指数分布、正态分布)
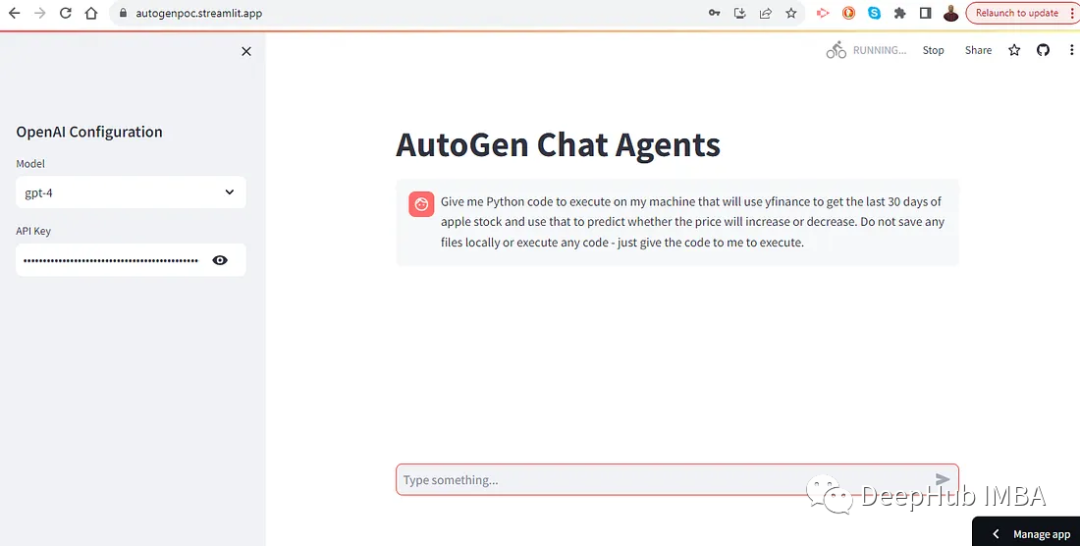
使用Streamlit创建AutoGen用户界面
我们来对AutoGen进行改造,使用Streamlit创建一个web界面,这样可以让我们更好的与其交互。
相关滤波(一)KCF
相关滤波KCF
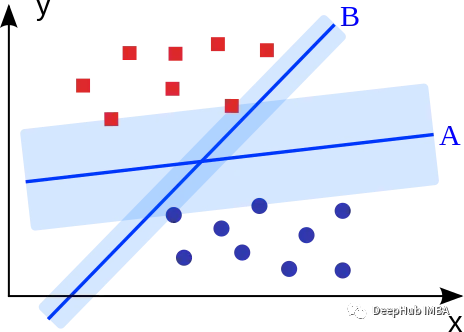
使用Python从零实现多分类SVM
本文将首先简要概述支持向量机及其训练和推理方程,然后将其转换为代码以开发支持向量机模型。之后然后将其扩展成多分类的场景,并通过使用Sci-kit Learn测试我们的模型来结束。
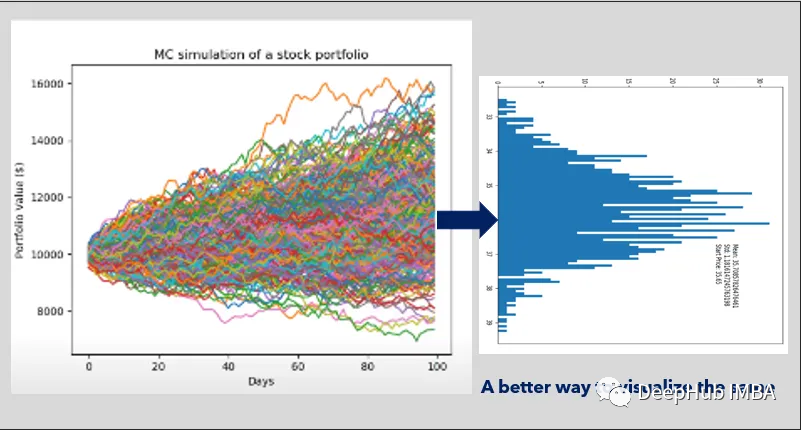
使用蒙特卡罗模拟的投资组合优化
在金融市场中,优化投资组合对于实现风险与回报之间的预期平衡至关重要。蒙特卡罗模拟提供了一个强大的工具来评估不同的资产配置策略及其在不确定市场条件下的潜在结果。
matlab系统辨识工具箱及其反向验证
时,通过对输入输出数据采集,通过数学迭代找到控制对象的近似模型。首先制作输入数据,在simulink中的输入数据需要是实数、整型、浮点数,且第一列为时间数据,因此结合原数据采样时间为0.08s,可得制作数据时间间隔为0.08s,数据量为1000,因此时间为0-0.08*1000s。在上述ARX模型中
【AI】了解人工智能、机器学习、神经网络、深度学习
【AI】了解人工智能、机器学习、神经网络、深度学习。
【AI机器学习入门与实战】训练模型、优化模型、部署模型
弄清楚在机器学习中训练模型、评估优化模型、部署模型上线到底该怎么做?
基于BILSTM时间序列预测 python程序
基于BILSTM时间序列预测 python程序
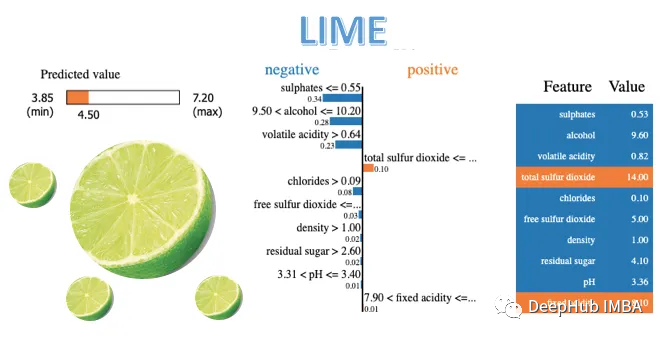
使用LIME解释各种机器学习模型代码示例
在本文中,我们将介绍LIME,并使用它来解释各种常见的模型。
支持向量机SVM(包括线性核、多项式核、高斯核)python手写实现+代码框架说明
支持向量机SVM(包括线性核、多项式核、高斯核)python手写实现+代码框架说明
Pytorch版Mask-RCNN图像分割实战(自定义数据集)
Mask R-CNN是一种广泛应用于目标检测和图像分割任务的深度学习模型,它是由Faster R-CNN(一种快速目标检测模型)和Mask R-CNN(一种实例分割模型)组成的。Mask R-CNN将Faster R-CNN中的RPN和RoI Pooling层替换成了RPN和RoI Align层,以
数据抽样技术全面概述
抽样是研究和数据收集中不可或缺的方法,能够从更大数据中获得有意义的见解并做出明智的决定的子集。不同的研究领域采用了不同的抽样技术,每种技术都有其独特的优点和局限性。
RANSAC算法(仅供学习使用)
RANSAC(Random Sample Consensus)算法是一种基于随机采样的迭代算法,用于估计一个数学模型参数。它最初由Fischler和Bolles于1981年提出,主要用于计算机视觉和计算机图形学中的模型拟合和参数估计问题。RANSAC算法的基本思想是通过随机采样一小部分数据来估计模型



