广州大学人工智能原理-实验三-推理系统
广州大学人工智能原理-实验三-推理系统
【Unity6.0+AI】Unity版的Pytorch之Sentis-把大模型植入Unity
Sentis 是一个用于人工智能模型的本地推理引擎(神经网络推理库),它利用终端用户设备上的计算,而不是云服务器。它可以在任何可以部署 Unity 运行时的地方运行。可以使用 Sentis 将训练有素的神经网络模型导入 Unity,然后在 Unity 支持的任何平台和编辑器中本地实时运行这些模型。您
AI股票崩盘预测模型(企业建模_论文科研)ML model for stock crash prediction
在美国,FICO 评分,通常称为信用评分,是一个三位数的数字,用于评估一个人在获得信用卡或贷方贷款时偿还信用的可能性。这种大量抛出证券的现象也称为卖盘大量涌现。用户输入股票名字,软件自动输出股票信用分数,散户和机构就可以购买信用分数高的股票,避开信用分数低的股票,进而减少投资风险。我方模型可以部署到
【AI】Pytorch 系列:学习率设置
lr_lambda(function or list)- 一个计算学习率调整倍数的函数,输入通常为 step,当有多个参数组时,设为 list。
人工智能 | 自然语言处理的发展历程
**自然语言处理技术**,简称**NLP**,是计算机科学中的一个重要研究领域。自然语言处理技术的发展历程从20世纪50年代开始,经过了多个阶段,并不断地迭代发展,如今已经成为信息技术领域中的重要一环。
穿戴式设备?嵌入式系统?智能助理?#竞赛作品展示 AI PC 是流动的
我们不再受限于传统桌面或笔记本电脑的物理界限,人工智能和个人电脑的功能性正在无缝融合,逐渐形成一个动态的技术生态系统。在这个全新的生态系统中,AI PC能理解用户的需求、习惯和偏好,不再是一个单一的、固定的设备,而是一个流动的、适应性强的平台。想象一下,AI PC 有可能是一个穿戴式设备、一个嵌入式
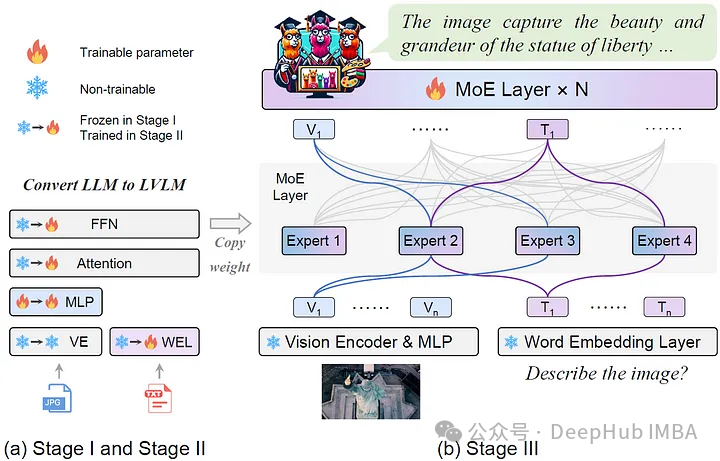
MoE-LLaVA:具有高效缩放和多模态专业知识的大型视觉语言模型
MoE-LLaVA利用了“专家混合”策略融合视觉和语言数据,实现对多媒体内容的复杂理解和交互。
AI前沿论文速递 24.01.23
AI前沿论文速递,github高星论文
AI+城市运行“一网统管”建设白皮书,核心建设目标和内容
一网统管”是指依托智能城市运行管理中心的实体化运作,以物联网、大数据、人工智能、区块链等现代信息技术为手段,对城市运行进行全域的即时分析、指挥、调动、管理,实现对城市运行中各类事项“一网打尽”、城市治理“一屏通览”。AI+城市运行“一网统管”建设的目标是:通过建设智能城市运行管理中心,实现对城市运行
AI智能问答系统(2):技术架构
(4)CPU后端CPU后端 'cpu'是性能最低但最简单的后端,所有运算均在普通的JavaScript中实现,这使它们的可并行性较差,这些运算还会阻塞界面线程。CPU后端对于测试或在 WebGL不可用的设备上非常有用。
AI生活,由元开始
对于普通人来说,尤其是非IT从业人士,虽然AI已经成为新闻报道中耳熟能详的科技主题词,但除了在聊天应用中与语音助手互动之外,大型AI模型往往并不常见,而人形机器人更是尚未走进我们的日常生活。我们正站在一个技术日新月异的时代,未来AI生活将更加普及,而我们也需要在技术发展的同时,保障数据隐私、解决伦理
XAI:探索AI决策透明化的前沿与展望
随着人工智能技术的快速发展,它已经深入到了我们生活的方方面面,从智能手机、自动驾驶汽车到医疗诊断和金融投资,AI都在发挥着越来越重要的作用。然而,随着AI技术的广泛应用,其决策过程和原理的透明度问题也逐渐浮出水面。为了解决这一问题,解释性AI(XAI)应运而生,它旨在提高AI系统的透明度和可理解性,
情感识别技术:人工智能在金融行业的潜在影响
1.背景介绍情感识别(Sentiment Analysis)技术是一种自然语言处理(Natural Language Processing, NLP)方法,它旨在分析文本数据中的情感倾向。在过去的几年里,情感识别技术在各个领域得到了广泛应用,包括电子商务、社交媒体、广告、政治等。然而,金融行业是一个
CUDA与PyTorch版本对应关系
CUDA与PyTorch版本对应关系
可解释性模型的未来趋势:如何应对人工智能的挑战
1.背景介绍人工智能(Artificial Intelligence, AI)已经成为现代科学技术的重要一环,它涉及到计算机科学、数学、统计学、人工智能等多个领域的知识。在过去的几年里,人工智能技术的发展取得了显著的进展,如深度学习、自然语言处理、计算机视觉等。然而,随着人工智能技术的不断发展,我们
【奶奶看了都会】用AI工具制作微信动态红包封面保姆级教程,附动态红包封面领取
AI一天,人间一年。我是卷福同学,一个在福报厂修过福报的程序员今年微信红包封面新出了动态封面,点开红包之后是个动图,而且有的还能加上音乐,可以说逼格非常高。假如你在朋友之间发红包用上这么一个封面,朋友们肯定纷纷投来羡慕的目光,话不多说,先看动态红包封面效果图。(文末会送出这款红包封面,数量有限哦~)
AI图片物体移除器:高效、便捷的AI照片物体擦除工具
一款Windows平台下的AI图像工具,它利用人工智能技术让用户能够轻松快速地移除照片中的不需要的物体。
Windows下深度学习环境配置(超详细跟李沐学Ai)
安装的软件有miniconda,CUDA,Pycharm,需要安装的包有Pytorch,jupyter,d2l
临时工说:AI 人工智能化对于DBA 的工作的影响
这开头还是介绍一下群,如果感兴趣PolarDB ,MongoDB ,MySQL ,PostgreSQL ,Redis, Oceanbase, Sql Server等有问题,有需求都可以加群群内,可以解决你的问题。加群请联系 liuaustin3 ,(共1900人左右 1 + 2 + 3 + 4 +5
人工智能AI写微头条变现,写作变现项目,日入200+(怎么做微头条才能有收益)
在当今信息爆炸的时代,微头条成为了一个非常受欢迎的平台,通过分享自己的见解和心得,从而实现变现的目标。本篇文章旨在分享如何利用AI技术写微头条,实现简单操作,每日轻松获得200+的收入。接下来,我将罗列出要分享的知识点,希望能吸引您继续阅读并获得实用的经验。随着人工智能的快速发展,AI写作已经成为了



