【视觉SLAM】ORB-SLAM: Tracking and Mapping Recognizable Features
摘要当前的视觉SLAM系统构建的地图非常适合在会话期间跟踪相机。然而,这些地图并非设计用于在其他会话中使用不同的相机甚至相同的相机执行定位,而是从不同的视点观察地图。这种限制来自缺乏被识别的地图能力。在本文中,我们提出了一种新的基于关键帧的SLAM系统,它通过直接映射可用于识别的特征来提高地图的可重
ROS从入门到精通(十) TF坐标变换原理,为什么需要TF变换?
TF坐标变换是ROS中很重要的组成原理,本节从两个实例出发介绍TF变换的作用,最后基于Rviz可视化加深理解
备赛笔记:神经网络
信息熵为信息量的量度,对于事件x的信息熵为-log(p(x)),x发生概率越小,信息熵越大,信息量越大。1独热矢量(one-hotvector)样本本身人为打的标签,这里相当于对样本分类,某一样本在这一类概率为1,其他概率为0,标签矩阵维数代表分类数量。监督学习(supervisedlearning
园区自动驾驶实车平台决策规划控制系统(一)——基于纯追踪算法的横向控制(C++实现)
园区自动驾驶(一)——基于Pure Pursuit的横向控制由于本文是针对园区的自动驾驶,车速较低,且循迹路径是一条固定的路线,测试路径如下图所示,图中:绿色路径是录制的离线路径,录制方法是手动开车时记录下组合惯导系统的实时定位,并保存;紫色的路径是实际行驶路径;蓝色长条不是车辆模型,长度也不是车身
【自动驾驶模拟器AirSim快速入门 | 03】模型训练
在本笔记本中,我们将定义网络架构并训练模型。我们还将讨论数据上的一些转换,以回应我们在笔记本的数据探索部分所做的观察。
即将步入大四,开始我最真情的告白
大一下学期加入机器人实验室,开始接触ROS,从装Ubuntu双系统开始,就开始令我难忘的学习生活,开始学习ROS,学习古月老师的ROS入门21讲,后来有问题,就常常在CSDN上找答案,跟着师哥师姐做实验室的项目,在这个学习的过程中有想过放弃,有过滑水摸鱼,觉得自己是老师和师哥师姐的打工人,是给他们干
【自动驾驶模拟器AirSim快速入门 | 01】自动驾驶模拟器AirSim实战演练
项目面向自动驾驶初学者、研究人员和行业专家。项目以jupter notebook作为载体,使用流行的开源工具(如Keras、TensorFlow等)构建,项目提供数据集、源代码、AirSim模拟器,以便于实现自动驾驶快速仿真。...............
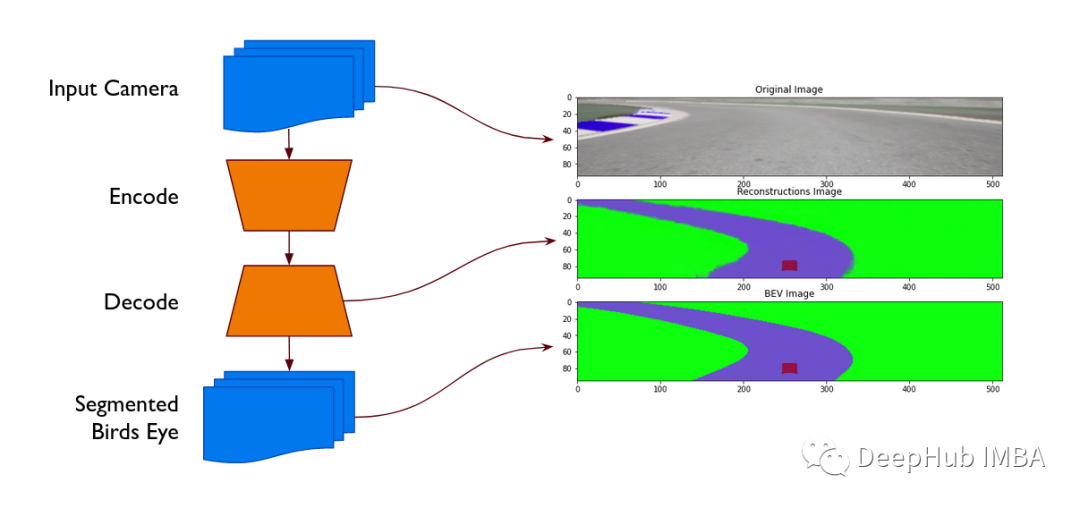
基于自动编码器的赛车视角转换与分割
本文将利用vae将汽车前置视像头的图像转换成分割后的鸟瞰图
5.1补充 源码安装move_base和navigation
前文给出了2进制安装2个包的方法,使用简单但不支持源码的查看和修改。此文给出源码安装方案。
ROS从入门到精通(零) 教程导读
ROS概念太多太复杂?ROS从入门到精通系列教程导读
Coursera自动驾驶课程第20讲:Mission Planning in Driving Environments
1. Creating a Road Network Graph2. Dijkstra’s Shortest Path Search3. A-Star Shortest Path Search
【机器人开发】一文解析ROS的launch启动文件
CSDN话题挑战赛第1期活动详情地址:https://marketing.csdn.net/p/bb5081d88a77db8d6ef45bb7b6ef3d7f参赛话题:自动驾驶技术学习记录话题描述:自动驾驶是当前最火热的技术之一,吸引了无数的开发者与学习者融入其中。然而,自动驾驶技术是系统硬件平台
【ROS进阶】5000字解析如何确定ROS编程中数据类型(消息类型)
文章目录一、已有ROS仿真器,自行编写控制器节点1、利用rostopic list明确仿真器可用的topic2、rostopic info 找到对应话题的类型3、rosmsg show查找msg定义4、编写控制器节点补充:Twist定义的介绍二、自己构建Publisher和Subscriber节点(
Apollo6.0自动驾驶平台——安装及测试
经过一晚上+一个上午的努力,终于把Apollo跑起来了。显卡:NVIDIA GEFORCERTX 3050Ti 硬盘空间:/目录 100G+ /home目录 350G+ 系统:Ubuntu20.04.0 代码版本:Apollo 6.0
无人驾驶路径规划(一)全局路径规划 - RRT算法原理及实现
前言:由于后续可能要做一些无人驾驶相关的项目和实验,所以这段时间学习一些路径规划算法并自己编写了matlab程序进行仿真。开启这个系列是对自己学习内容的一个总结,也希望能够和优秀的前辈们多学习经验。一、无人驾驶路径规划众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。路径规划是感知和控
自动驾驶中激光雷达如何检测障碍物
自动驾驶中激光雷达如何检测障碍物1. 介绍1.1 激光雷达-一种三维激光传感器1.2 激光雷达的优缺点?1.3 基于激光雷达如何进行障碍物检测?1.4 点云处理难点2. 点云处理2.1 点云处理-体素网格2.1.1 什么是体素网格?3 三维点云的分割3.1 RANSAC3.1.1 RANSAC 的实
对Nuscenes数据集一无所知,手把手带你玩转Nusences数据集
文章目录Nuscenes数据集简介准备工作✨✨✨数据读取✨✨✨安装库导入相关模块和数据集场景scene⭐⭐⭐样本sample⭐⭐⭐样本数据 sample_data⭐⭐⭐样本标注 sample_annotation⭐⭐⭐实例 instance类别categories属性attributes⭐⭐⭐可视化
技术升级 | 戴着口罩也能识别人脸啦
近期,国内疫情出现反复,作为抗击疫情的战争中强有力的护盾,口罩再次成为了公民的标配,但在抗疫常态化的进程中,口罩却对诸如“刷脸”支付、身份认证等需要人脸识别的场景提出了挑战。人脸识别原理人脸识别技术在了解人脸识别面临的问题之前,我们首先要了解人脸识别系统,人脸识别系统主要是由硬件和软件两部分构成,硬
图文详解神秘的梯度下降算法原理(附Python代码)
图文详解梯度下降算法原理+手推公式,附Python代码实战加深理解
2021年电赛F题智能送药小车(国二)开源分享
2021电赛F题智能送药小车设计并制作智能送药小车,模拟完成在医院药房与病房间药品的送取作业。使用ArduinoMega2560主控,Openmv4 Plus作视觉处理。



