
CSDN话题挑战赛第1期
活动详情地址:https://marketing.csdn.net/p/bb5081d88a77db8d6ef45bb7b6ef3d7f
参赛话题:自动驾驶技术学习记录
话题描述:自动驾驶是当前最火热的技术之一,吸引了无数的开发者与学习者融入其中。然而,自动驾驶技术是系统硬件平台与人工智能、物联网、大数据、云计算等新一代信息技术深度融合的产物,具有知识新、内容杂、难度深、缺少系统教程等特点,让许多开发者眼花缭乱。
本话题通过记录分享自动驾驶相关技术,为大家提供相互学习与交流的平台。话题分享与讨论的技术点包括不限于:自动驾驶算法、自动驾驶系统基础架构、智能驾驶交互技术、虚拟仿真、自动化测试、无人系统与车辆平台、自动驾驶计算平台与传感器等。
【ROS21讲】第六部分 launch启动文件(19讲)
文章目录
(一)launch启动文件的概念
launch文件,是通过配置XML文件,实现多节点的配置与启动(可自动启动ROS MASTER)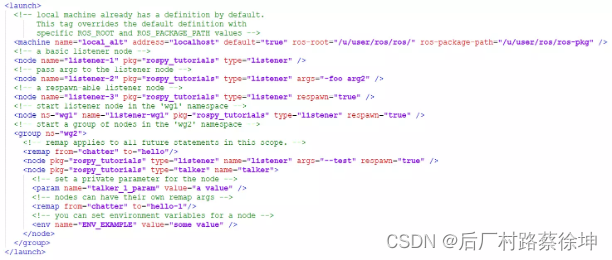
(二)launch文件的语法
详细launch文件语法格式,参考链接:http://wiki.ros.org/roslaunch/XML
1、根标签
<launch>
launch文件中的根元素采用标签定义
语法与案例:
2、启动节点
<node>
用于配置启动节点的相关信息
语法:
pkg
:节点所在的功能包名称
type
:节点的可执行文件名称
name
:节点运行时的名称,因为会涉及单节点运行多次,造成重名问题
output="screen"
:节点标准信息输出打印到屏幕终端,默认为日志文件
respawn="true"
:复位属性,该节点停止是,会自动重启,默认为false
required="true"
:必要条件,该节点终止时,launch文件中其他节点也会终止
ns="namespace"
:命名空间,为节点内的相对名称添加命名空间前缀
args="arguments"
:节点需要输入参数
示例:
<nodepkg="turtlesim"type="turtle_teleop_key"name="teleop"output="screen"/>
3、全局参数设置
<param><rosparam>
<param>
:设置ROS系统全局参数,将参数存储在参数服务器中,适用于单参数设置
语法:
<param name="output_frame" value="odom"/>
示例:
<paramname="turtle_name1"value="Tom"/><paramname="turtle_name2"value="Jerry"/>
<rosparam>
:设置ROS系统全局参数,将参数存储在参数服务器中,适用于参数文件设置
语法:
<rosparam file=" .yaml" command="load">
示例:
<rosparamfile="$(find learning_launch)/config/param.yaml"command="load"/>
4、局部参数设置
<arg>
<arg>
:设置launch文件内部的局部变量,仅lanuch文件内部使用
语法:
< !-- 定义 -->
<argname="arg-name"default="arg-value"/>
< !-- 使用 -->
<paramname="foo"value="$(arg arg-name)"/><nodename="node"pkg="package"type="type"args="$(arg arg-name)"/>
5、重映射
<remap>
<remap>
:重新映射ROS计算图资源的名称
语法:
from
:原命名
to
:映射后的命名
示例:
<remapfrom="/turtlebot/cmd_vel"to="/cmd_vel"/>
6、嵌套
<include>
<include>
:包含其他launch文件,类似于C语言中的头文件包含。
语法:
<include file="..."/>
示例:
<includefile="$(dirname)/other.launch">
7、注释
语法:
<!-- 注释内容 -->
(三)launch文件运行方式与实例
1、launch启动文件的运行方式
语法:
roslaunch 功能包名 launch文件名
2、launch文件实例
<launch><nodepkg="learning_topic"type="person_subscriber"name="talker"output="screen"/><nodepkg="learning_topic"type="person_publisher"name="listener"output="screen"/></launch>
<launch><paramname="/turtle_number"value="2"/><nodepkg="turtlesim"type="turtlesim_node"name="turtlesim_node"><paramname="turtle_name1"value="Tom"/><paramname="turtle_name2"value="Jerry"/><rosparamfile="$(find learning_launch)/config/param.yaml"command="load"/></node><nodepkg="turtlesim"type="turtle_teleop_key"name="turtle_teleop_key"output="screen"/></launch>
<launch><!-- Turtlesim Node--><nodepkg="turtlesim"type="turtlesim_node"name="sim"/><nodepkg="turtlesim"type="turtle_teleop_key"name="teleop"output="screen"/><nodepkg="learning_tf"type="turtle_tf_broadcaster"args="/turtle1"name="turtle1_tf_broadcaster"/><nodepkg="learning_tf"type="turtle_tf_broadcaster"args="/turtle2"name="turtle2_tf_broadcaster"/><nodepkg="learning_tf"type="turtle_tf_listener"name="listener"/></launch>
<launch><includefile="$(find learning_launch)/launch/simple.launch"/><nodepkg="turtlesim"type="turtlesim_node"name="turtlesim_node"><remapfrom="/turtle1/cmd_vel"to="/cmd_vel"/></node></launch>
CSDN话题挑战赛第1期
活动详情地址:https://marketing.csdn.net/p/bb5081d88a77db8d6ef45bb7b6ef3d7f
版权归原作者 后厂村路蔡徐坤 所有, 如有侵权,请联系我们删除。