torch.einsum() 用法说明
这里,j 是求和下标,i 和 k 是输出下标(有关原因的更多详细信息,请参见下面的部分)。例外情况是,如果对相同的输入操作数重复下标,在这种情况下,此操作数的标有此下标的维度必须在大小上匹配,并且操作数将被其沿这些维度的对角线替换。,它将覆盖下标未覆盖的维度,例如,对于具有 5 维的输入操作数,等式
【AIGC重塑教育】AI大模型驱动的教育变革与实践
例如,在艺术领域,生成式AI已经能够生成令人惊叹的作品,如DALL·E的图像生成、OpenAI的文本生成、Magenta的音乐生成等。在STEM(科学、技术、工程、数学)教育中,AI可以提供更多的模拟和实验场景,让学生可以通过动手操作、探索发现、试错反馈等方式,学习基本的概念和原理。在欧美,或许四分
语音识别与Python编程实践
语音识别是一门复杂的交叉技术学科,通常涉及声学,信号处理,模式识别,语言学,心理学,以及计算机等多个学科领域。语音识别技术的发展可追寻到20世纪50年代,贝尔实验室首次实现Audrey英文数字识别系统(可识别0——9单个数字英文识别),并且准确识别率达到90%以上。普林斯顿大学和麻省理工学院在同一时
探索AI交互:Python与ChatGPT的完美结合!
随着人工智能的迅速发展,AI交互正成为技术领域的一大亮点。在这个过程中,Python编程语言和ChatGPT模型的结合展现出强大的潜力,为创造性、智能的对话系统带来了新的可能性。本文将探讨如何将Python与ChatGPT完美结合,为AI交互带来全新的体验。
机器学习实验 - 朴素贝叶斯分类器
西南交通大学 机器学习实验2 朴素贝叶斯分类器(1)了解朴素贝叶斯与半朴素贝叶斯的区别与联系,掌握高斯分布、多项式分布和伯努利分布的朴素贝叶斯计算方法。(2)编程实现朴素贝叶斯分类器,基于多分类数据集,使用朴素贝叶斯分类器实现多分类预测,通过精确率、召回率和F1值度量模型性能。
【Python】人工智能-机器学习——不调库手撕贝叶斯分类问题
怎么用python手撕一个贝叶斯分类?要求不调用其他核心库如tf,sk等,只用numpy、pandas库?这篇文章会告诉你答案!!
[AI]ChatGPT4 与 ChatGPT3.5 区别有多大
ChatGPT 3.5 注册已经不需要手机了,直接邮箱认证就可以,这可真算是好消息,坏消息是 ChatGPT 4 还是要收费。那么 GPT-3.5 与 GPT-4 区别有多大呢,下面简单测试一下。以从 TDengine 订阅数据为例,TDengine 算是不太小众的数据库,如果连这个都能搞定,说明G
【Python】GDAL基本操作/遥感大图显示
遥感图像往往尺寸较大,无法用默认的图像浏览器加载。GDAL是空间数据处理的开源包,支持多种数据格式的读写。遥感图像是一种带大地坐标的栅格数据,因此,可以借用GDAL对遥感图像进行读写,本文就来记录一些相关操作。
做一件荒谬的事:用AI推理下一次双色球结果 v0.1
使用历史双色球中奖数据去推导下一次中间结果。模型基于LSTM深度学习模型
使用subplot_mosaic创建复杂的子图布局
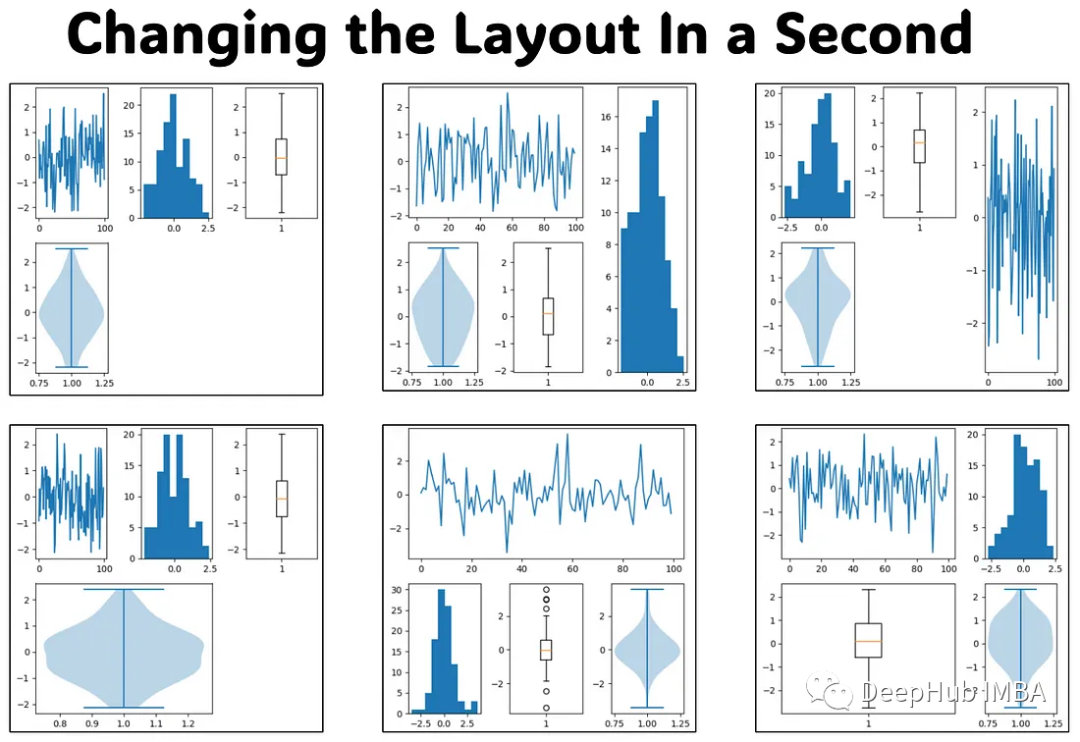
在本文中,我将介绍matplotlib一个非常有价值的用于管理子图的函数——subplot_mosaic()。如果你想处理多个图的,那么subplot_mosaic()将成为最佳解决方案。我们将用四个不同的图实现不同的布局。
Python利用逻辑回归分类器对乳腺肿瘤进行良性/恶性预测实战(超详细 附源码)
Python利用逻辑回归分类器对乳腺肿瘤进行良性/恶性预测实战(超详细 附源码)
pytorch训练可视化包visdom的使用
Visdom是一个基于Python的可视化工具包,可以用于PyTorch等深度学习框架中的实时数据可视化。它提供了一个Web界面,可以方便地创建图表、散点图和直方图等可视化元素。相比具有更轻量、更便捷、更丰富、更快速等特点。visdom的github主页visdom的中文参考文档visdom的优秀教
Pytorch学习笔记(5):torch.nn---网络层介绍(卷积层、池化层、线性层、激活函数层)
Pytorch学习笔记(5):torch.nn---网络层介绍(卷积层、池化层、线性层、激活函数层)
模式识别 第7、8章 特征的选择和提取
特征→ 特征空间:每一个特征对应特征空间的一个维度 ;特征越多,特征空间的维度越高原则:在保证分类效果的前提下用尽量少的特征来完成分类基本概念(1)特征形成:由仪器直接测量出来的数值,或者是根据仪器的数据进行计算后的结果(2)特征选择:用计算的方法从一组给定的特征中选择一部分特征进行分类(3)特征提
Python制作AI贪吃蛇,很多很多细节、思路都写下来了!
(蛇每走一步,就更新snake距离food的board距离,涉及 board_rest (更新每个非snake元素距离food的距离)和 board_refresh (本文这里采用BFS算法)),寻找到best_move,然后让蛇移动即可。熟悉Curses中相关指令后基本就没什么了, 保证按的下一个
机器学习-基于朴素贝叶斯的垃圾邮件分类
概率论是许多机器学习算法的基础,此篇博客会给出一些使用概率论进行分类的方法。首先从一个最简单的概率分类器开始,然后给出一些假设来学习朴素贝叶斯分类器。我们称之为“朴素”,是因为整个形式化过程只做最原始、最简单的假设。我们还将构建另一个分类器,观察其在真实的垃圾邮件数据集中的过滤效果。
量化交易与人工智能:Python库的应用与效用
量化交易是一种利用计算机算法执行交易策略的交易方法,它依赖于严格定义的规则和数学模型,而非人的主观判断。这种交易方式借助大量的金融数据和技术分析工具来执行交易,以期获得更好的交易结果。为什么量化交易越来越受欢迎?量化交易利用计算机执行交易,消除了人为因素和情绪对交易决策的影响,同时能在瞬息万变的市场
深度学习模型的参数、计算量和推理速度统计
在没有过拟合的情况下,相同模型结构下,一般模型的参数量和计算量与最终的性能成正比,在比较不同模型性能时,最好能保持模型参数量和计算量在相同水平下,因此相应参数的统计很重要。这里只进行理论计算,最终的效果(内存和速度)还和网络结构,代码实现方式、应用的平台性能等条件有关系,例如使用GEMM实现CNN时
AI实战,用Python玩个自动驾驶!
相比于模拟器CARLA,highway-env环境包明显更加抽象化,用类似游戏的表示方式,使得算法可以在一个理想的虚拟环境中得到训练,而不用考虑数据获取方式、传感器精度、运算时长等现实问题。由于state数据量较小(5辆车*7个特征),可以不考虑使用CNN,直接把二维数据的size[5,7]转成[1
人工智能教程(三):更多有用的 Python 库
在本系列的上一篇人工智能教程(二):人工智能的历史以及再探矩阵中,我们回顾了人工智能的历史,然后详细地讨论了矩阵。在本系列的第三篇文章中,我们将了解更多的矩阵操作,同时再介绍几个人工智能 Python 库。



