Python图像处理
python图像处理
PyTorch搭建LSTM实现多变量输入多变量输出时间序列预测
PyTorch搭建LSTM实现多变量输入多变量输出时间序列预测
【机器学习】梯度下降之数据标准化
吴恩达机器学习笔记在线性回归中,尤其是多变量回归模型,由于各个的数据之间量化纲位不同,如果数据范围分别是是【0~1000,0 ~5】或者【-0.00004 ~ 0.00002,10 ~ 30】, 那么在使用梯度下降算法时,他们的等高线是一个又窄又高的等高线,如下图:因为一个他们量化纲位不同会出现
KMean算法精讲
KMeas算法是一种聚类算法,同时也是一种无监督的算法,即在训练模型时并不需要标签,其主要目的是通过循环迭代,将样本数据分成K类。
浅谈sklearn中的数据预处理
sklearn中的数据预处理
机器学习之数据处理与可视化【鸢尾花数据分类|特征属性比较】
大部分的机器学习模型所处理的都是特征,特征通常是输入变量所对应的可用于模型的数值表示。大部分情况下,收集得到的数据需要经过处理后才能够为算法所使用。通常情况下,一个数据集当中存在很多种不同的特征,其中一些可能是多余的或者与我们要预测的值无关的,可通过数据处理和可视化进行筛选。特征选择技术的必要性也体
MicroNet实战:使用MicroNet实现图像分类
本文通过对植物幼苗分类的实际例子来感受一下MicroNet模型的效果。模型来自官方,我自己写了train和test部分。从得分情况来看,这个模型非常的优秀,我选择用的MicroNet-M3模型,大小仅有6M,但是ACC在95%左右,成绩非常惊艳!!!这篇文章从实战的角度手把手带领大家完成训练和测试。
点标注、像素级视觉任务、Ground Truth
机器学习名词
ROS2之OpenCV基础代码对比foxy~galactic~humble
参考:推荐使用:YOLOX + ROS2 object detection package也可以参考:github.com/jeffreyttc/opencv_ros2vision_opencvros2 vision_opencv 包含将 ROS 2 与 OpenCV 接口的包,OpenCV 是一个
Mask_RCNN项目下载、配置、运行保姆级教程
Mask_RCNN项目下载、配置、运行保姆级教程
计算机视觉可解释性——将特征图的某一通道转化为一张图来可视化
本实验是将某一层的特征图中的某一通道对其进行的可视化,有两种方式一种是使用opencv;另一种是使用tensorboard。运行结果使用的resnet50作为backbone的效果更好,将layer1的特征中第一层通道(256中的第1层)转化为图像 layer1. channels1.将layer1
数字图像处理-图像形态学处理-颗粒提取
在下图所示的二值图像particle.tif(另附件)中,包含若干大小相同的白色颗粒(即前景目标,颗粒直径大小大约22像素),背景为黑色像素所构成的区域。现要求设计一种形态学算法,用于区分图像中的不同颗粒对象(分三种类型:与图像边界融合在一起的颗粒、彼此交叠的颗粒、没有交叠的颗粒)。...
【GMM+KDE】基于MATLAB的GMM和KDE核估计得目标跟踪仿真
GMM是一种利用一定数量的小高斯函数混合逼近某变量的概率密度函数的方法,是在概率估计中常用的参数化模型,今年被广泛应用于模式识别领域。 一有限的GMM的描述非常简单,即由高新分布函数的任何凸组合形成一混合模型。对于n维实空间的随机变量x,利用GMM可以近似的表示其概率密度函数:
SVD 奇异值分解纯手工实现(C++)
奇异值分解SVD(紧奇异值分解,截断奇异值分解)C++实现
5.1补充 源码安装move_base和navigation
前文给出了2进制安装2个包的方法,使用简单但不支持源码的查看和修改。此文给出源码安装方案。
ROS从入门到精通(零) 教程导读
ROS概念太多太复杂?ROS从入门到精通系列教程导读
网易云信获计算机视觉国际权威赛事冠军,超分辨率技术性能问鼎全球
本月,计算机视觉和模式识别领域顶级会议 CVPR 将在美国新奥尔良市举办,同期计算机图像恢复领域最具影响力的全球性赛事 NTIRE 将在会上颁奖。在 NTIRE 高效率超分辨率挑战赛中,网易云信音视频实验室从众多参赛团队中脱颖而出,在总体性能赛道以明显优势获得冠军,展现了云信在视频超分技术领域的顶尖
(含源码和训练数据集)在Python中使用PyTorch Lightning构建自动语音识别(ASR)模型
人工智能正在推动第四次工业革命,机器可以听、看、理解、分析,然后在超人的水平上做出明智的决定。 然而,人工智能的有效性取决于底层模型的质量。 因此,无论您是学术研究人员还是数据科学家,您都希望快速构建具有各种参数的模型,并为您的解决方案确定最有效的模型。在这篇文章中,我将介绍使用 PyTorch L
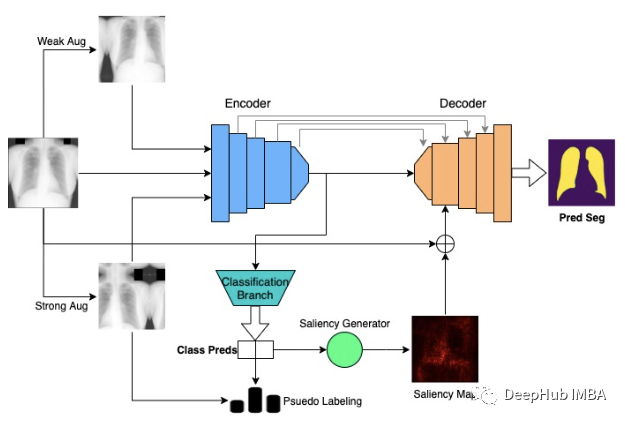
Multimix:从医学图像中进行的少量监督,可解释的多任务学习
在这篇文章中,我们解释了一个可用于联合学习分类和分割任务的新的稀疏监督多任务学习模型MultiMix。该论文使用四种不同的胸部x射线数据集进行了广泛的实验,证明了MultiMix在域内和跨域评估中的有效性。
Tensorflow 2.x(keras)源码详解之第十三章:keras中的评估指标及自定义评估指标
@[toc]# 1. keras中API使用方法- 评估指标位于tf.keras.metrics模块,该模块下的评估指标都是一个类,需要实例化后,调用相应的方法,以tf.keras.metrics.Mean为例



