PT100/PT1000温度采集电路方案
金 属 热 电 阻 如 镍 、铜 和 铂 电 阻 ,其 阻 值 随 温度的变化是正相关的, 以铂的物化性质最稳定,应用最广泛。常用铂电阻 Pt100 的测温范围为-200~850 ℃,此外 Pt500、Pt1000 等的测温范围依次缩小。Pt1000,测温范围-200~420 ℃。
【7】SCI易中期刊推荐——计算机 | 人工智能(中科院4区)
SCI即《科学引文索引》是1961年由美国科学信息研究所创办的文献检索工具。在我国,SCI不仅是一部权威的文献检索工具,更是评价个人&团队科研学术水平及优秀创新成果的一种重要依据。
遥感航拍影像25篇CVPR39个数据集
本文讲解了39个数据集,关于高空卫星图和低空无人机航拍图相。本文汇总了25篇CVPR2020年和2021年的论文。本文详细介绍了这25篇论文的任务是什么,难点是什么,场景是什么。同时,本文在需要的地方解释了一些卫星图和航拍图的入门常识和前置知识,比如digital surface model的含义。
深度学习从入门到精通——基于深度学习的地震数据去噪处理
传统机器学习SVM,boosting,bahhing,knn深度学习CNN(典型),GAN地震应用方向叠前地震数据随机噪声去除,实现噪声分离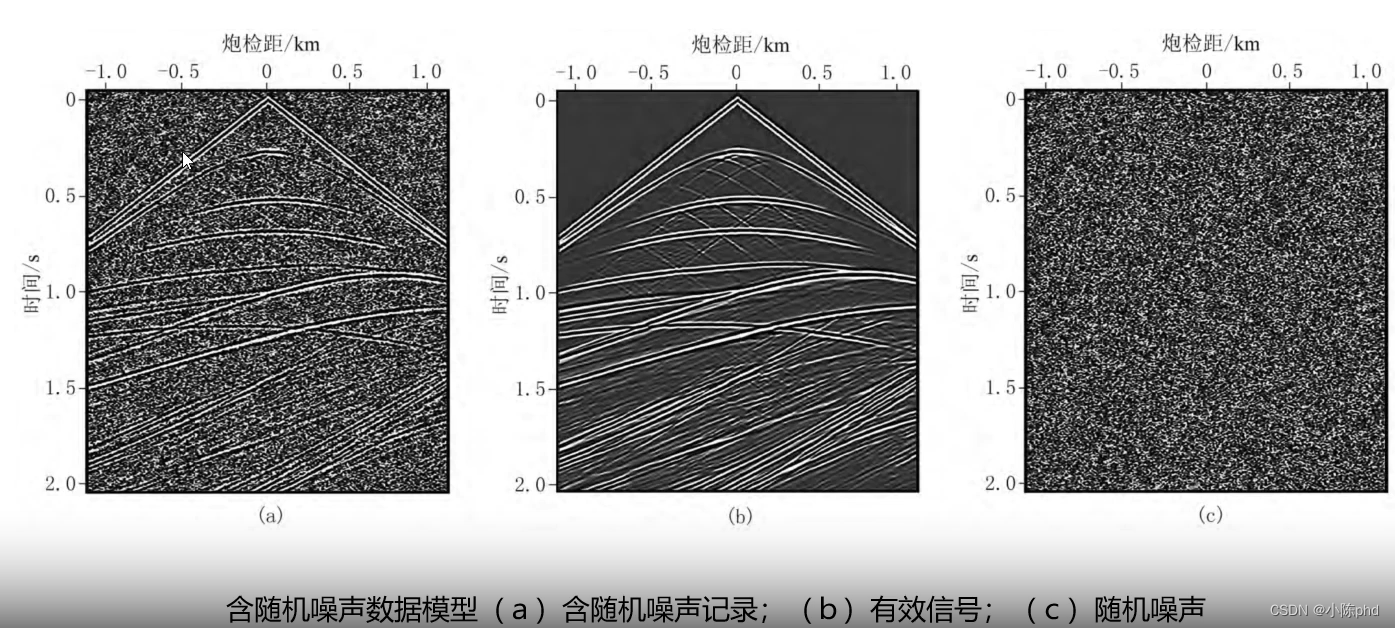面波去噪面波作
火爆全网的人工智能聊天机器人使用教程
一款强大的人工智能机器人。
使用YOLOv5训练NEU-DET数据集
一、下载YOLOv5源码和NEU-DET(钢材表面缺陷)数据集YOLOv5源码NEU-DET(钢材表面缺陷)数据集这里的数据集已经经过处理了,下载即可若通过其他途径下载的原始数据集标签为xml格式,需要转化为txt格式XML转txt格式脚本二、数据集准备NEU-DET(钢材表面缺陷)数据集中一共有六
实证论文结果复刻+stata代码解释
stata复刻实证论文结果以及代码解释
YOLOv7训练自己的数据集(超详细)
官方版本的YOLOv7训练自己的数据集
深度学习-inception模块介绍
深度学习-inception模块介绍
python构建知识图谱
python与知识图谱
文献阅读-基于深度学习的医疗图像分割综述
文献阅读-基于深度学习的医疗图像分割综述
文心一言发布的个人看法
富有创造力的人通常有他们自己的理论,而且彼此间的理论相当不同。罗伯特· 高尔文说创造力包含预期与奉献:预期是指在其他人认识到之前,便预见到某个事物将来会变得很重要;奉献是一种信念,它能够使一个人不受怀疑与挫折的干扰,坚持去实现愿景。
对比yolov4和yolov3
总体而言,yolov4是尝试组合一堆tricks,获取得到的模型,该模型具有训练更快、模型更轻、精度更高的特性。
tensorflow gpu版本安装教程
过程十分简陋,仅仅是个人的安装笔记,但其中粗体的注意事项大家可以参考一下,或许能解决你的报错。此过程需要提前安装好anaconda。我安装的为3.9.7的python,对应2.6.0的tensorflow安装过程分为:更新驱动NVIDIA,安装cuda和cudnn,tensorflow更新NVIDI
基于机器学习的时序数据预测方法
1、介绍股票预测模型的建模2、介绍股票预测领域中的经典算法的原理,分析算法的优缺点及改进方法方案3、展望该领域的研究趋势
pyqt使用graphicsView显示图片
文章目录源码untitled.pymain.py缩放图形界面使用Qt Designer绘制,如下菜单项添加一个open选项,窗口上是一个graphicsView组件。主要流程使用opencv 打开图片cv2转为QImageQImage转为QPixmap把QPixmap加入到QGraphicsScen
保研笔记八——YOLOV5项目复习
学习转载自:睿智的目标检测56——Pytorch搭建YoloV5目标检测平台_Bubbliiiing的博客-CSDN博客_睿智yolo Pytorch 搭建自己的YoloV5目标检测平台(Bubbliiiing 源码详解 训练 预测)-主干网络介绍_哔哩哔哩_bilibili还有一些视频的学习笔记。
什么是让ChatGPT爆火的大语言模型(LLM)
AI 应用程序正在总结文章、撰写故事和进行长时间对话——而大型语言模型正在承担繁重的工作。大型语言模型或 LLM 是一种深度学习算法,可以根据从海量数据集中获得的知识来识别、总结、翻译、预测和生成文本和其他内容。大型语言模型是 Transformer 模型最成功的应用之一。 它们不仅用于教授 AI
MATLAB环境下基于振动信号的轴承状态监测和故障诊断
基于现代信号处理的轴承状态监测和故障诊断。本文主要讲解如何从滚动轴承的振动信号中提取特征、进行状态监测和故障诊断。
【K210】K210学习笔记六——MaixHub在线模型训练识别数字
本文着重于如何使用MaixHub平台,在线训练模型,识别数字。MaixHub平台在近期升级了,以前只能将数据包上传训练,现在可以直接将图片上传到MaixHub平台,使用MaixHub平台打标签,然后训练模型,并且可以在MaixHub上看到识别的精准度等信息。......



