玩转ChatGPT:中科院ChatGPT Academic项目部署与测评
玩转ChatGPT:中科院ChatGPT Academic项目部署与测评
图解transformer | The Illustrated Transformer
写在最前边看transformer相关文章的时候发现很多人用了相同的图。直到我搜到作者的原文……于是决定翻译一下无删改的原文。翻译讲究:信、达、雅。要在保障意思准确的情况下传递作者的意图,并且尽量让文本优美。但是大家对我一个理工科少女的语言要求不要太高,本文只能保证在尽量通顺的情况下还原原文。作者博
【机器学习】——白话入门及术语解释
小白如何快速入门机器学习?如果不做专职的相关岗位开发,自己跑一些学习程序是否可行呢?比较现在各种框架都挺多的了,即使再不济,了解一下具体都能做哪些东西也是很不错的。
强化学习之AC系列算法(AC、A2C、A3C)
强化学习之AC系列算法(AC、A2C、A3C)
BP神经网络python代码详细解答(来自原文)
翻译如下 ** &#160; &#160; &#160; &#160; <font color=black size=6.5> 在 SCRATCH采用pyt...

Pandas 2.0 vs Polars:速度的全面对比
本文将比较Pandas 2.0(使用Numpy和Pyarrow作为后端)和Polars 0.17.0的速度。并且介绍使用Polars库复现一些简单到复杂的Pandas代码,这样也算是对Polars的一个简单介绍。另外测试将在4 cpu和32 GB RAM上进行。
如何判断训练中的模型已经收敛
3.模型收敛:train loss 下降趋于稳定,val loss 下降也趋于稳定,且train loss 的值与val loss 的值相差不大。5.train loss上升,val loss上升:网络结构设计有问题,或者训练参数设置不当等,及时停止学习,调整代码。4.train loss稳定,va
如何利用CloudCompare软件进行点云数据标注
目录一、CloudComparer软件介绍二、如何进行点云数据的人工“打标签”一、CloudComparer软件介绍CloudCompare是一个三维点云(网格)编辑和处理软件。最初,它被设计用来对稠密的三维点云进行直接比较。它依赖于一种特定的八叉树结构,在进行点云对比这类任务时具有出色的性能【1】
Python空间分析| 03 利用Python进行地理加权回归(GWR)
地理加权回归(GWR) GWR本质上是一种局部加权回归模型,GWR根据每个空间对象的周围信息,逐个对象建立起回归方程,即每个对象都有自己的回归方程,可用于归因或...
大模型时代的“Linux”生态,开启人工智能新十年
演讲 | 林咏华 智源人工智能研究院副院长 整理 | 何苗出品 | CSDN(ID:CSDNnews)2018 年以来,超大规模预训练模型的出现推动了 AI 科研范式从面向特定应用场景、训练专有模型,转变为大模型+微调+模型服务的AI工业化开发模式。直至对话大模型 ChatGPT 引发全球广泛关注,
机器学习-常用回归算法归纳(全网之最)
文章目录前言一元线性回归多元线性回归局部加权线性回归多项式回归Lasso回归 & Ridge回归Lasso回归Ridge回归岭回归和lasso回归的区别L1正则 & L2正则弹性网络回归贝叶斯岭回归Huber回归KNNSVMSVM最大间隔支持向量 & 支持向量平面寻找最大间隔
机器学习中的七种分类算法
Spike-and-slab priors(SSP):尖峰和平板先验
Cursor!!!GPT-4帮我写代码
目前为止应该是第一个免费能够使用GPT4工作的软件,看作者的Twitter,他说自己提前向OpenAI要到了GPT4的API,然后在这么短的时间内就集成出一个IDE,效率之高简直离谱,并且实际测试代码生成速度也巨快。
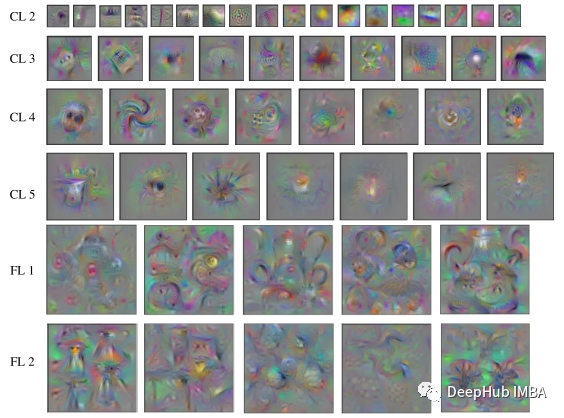
可视化CNN和特征图
卷积神经网络(cnn)是一种神经网络,通常用于图像分类、目标检测和其他计算机视觉任务。CNN的关键组件之一是特征图,它是通过对图像应用卷积滤波器生成的输入图像的表示。
【交通数据(1)——加州高速路网PeMS交通数据】
交通数据(1)——加州高速路网PeMS交通数据一、PeMS数据介绍1. 数据简介二、相关数据下载1.引入库2.读入数据一、PeMS数据介绍1. 数据简介 使用PeMS,用户可以对高速公路性能进行统一、全面的评估,基于对高速公路网络当前状态的了解做出运营决策,分析拥堵瓶颈以确定潜在的补救措施,并做出
Prompt Learning详解
现阶段NLP最火的两个idea 一个是对比学习(contrastive learning) 另一个就是 promptprompt 说简单也很简单 看了几篇论文之后发现其实就是构建一个语言模板 但是仔细想想又觉得复杂 总感觉里面还有很多细节 因此我想从头到尾梳理一下prompt 很多地方会把它翻译成[
准确率、精确率、召回率、F1-score
追求召回率高,则通常会影响精确率。F1值为算数平均数除以几何平均数,且越大越好,将Precision和Recall的上述公式带入会发现,当F1值小时,True Positive相对增加,而false相对减少,即Precision和Recall都相对增加,即F1对Precision和Recall都进行
ChatGPT国内怎么使用-ChatGPT是什么
尽管 GPT-3 的源代码尚未发布,但StackExchange网站上的一篇帖子表明 GPT-3 是用“与 GPT-2 相同的模型和架构”编写的。它以书籍、文章和网站的文本形式在有偏见和无偏见的数据上进行了良好的训练。一旦它对语言有了足够的了解,它就可以根据给定的提示或主题生成自己的文本。对于从事各
AI未来十年新范式,生成式人工智能的挑战与机遇
2023年3月18日,CSIG图像图形企业行活动拉开帷幕,介绍AI未来十年发展新范式...
逻辑回归(LogisticRegression)中的参数(详解)
LogisticRegression(penalty='l2', dual=False, tol=0.0001, C=1.0, fit_intercept=True, intercept_scaling=1, class_weight=None, random_state=None, solver=



