我用python/C++调用ChatGPT自制了一个聊天机器人
我用python调用ChatGPT自制了一个聊天问答机器人,附完整流程和代码
yolov5目标检测神经网络——损失函数计算原理
yolov5神经网络的损失函数计算原理
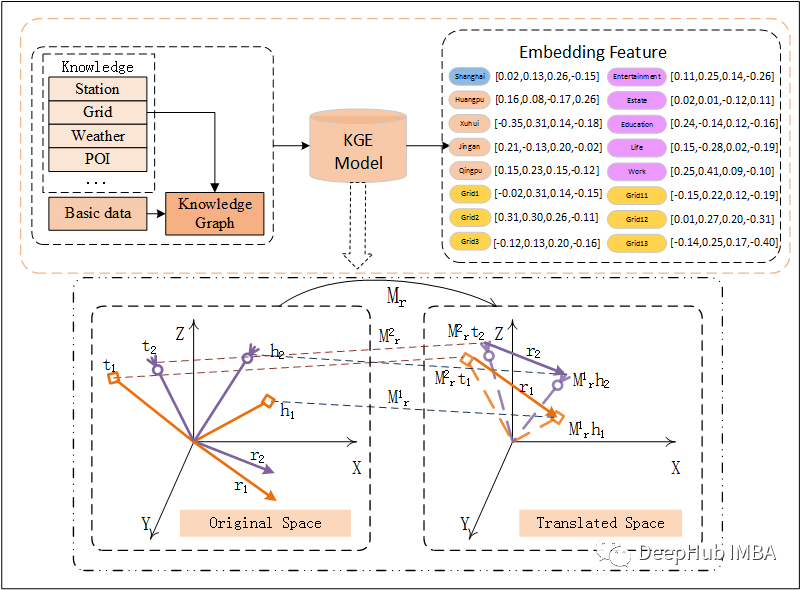
知识图谱嵌入模型 (KGE) 的总结和比较
知识图谱嵌入(KGE)是一种利用监督学习来学习嵌入以及节点和边的向量表示的模型。本文将常见的KGE 模型在捕获关系类型方面的比较
深度强化学习-TD3算法原理与代码
引言Twin Delayed Deep Deterministic policy gradient (TD3)是由Scott Fujimoto等人在Deep Deterministic Policy Gradient (DDPG)算法上改进得到的一种用于解决连续控制问题的在线(on-line)异策(
Ubuntu20.04安装cuDNN(包括WSL)
Nvidia官网cuDNN安装说明sudo apt-get install libcudnn8=8.x.x.x-1+cudaX.Y的替换是确定的,跟第一步下载cudnn-local-repo-xxxx.deb包有关,不需要重新下载。
【情人节专属】AI一键预测你和Ta的CP值
想知道你和心仪对象的CP指数有多少吗?AI一键就能预测。只需上传自己和心仪对象的照片,一键Run in ModelArts就可以知晓CP指数~
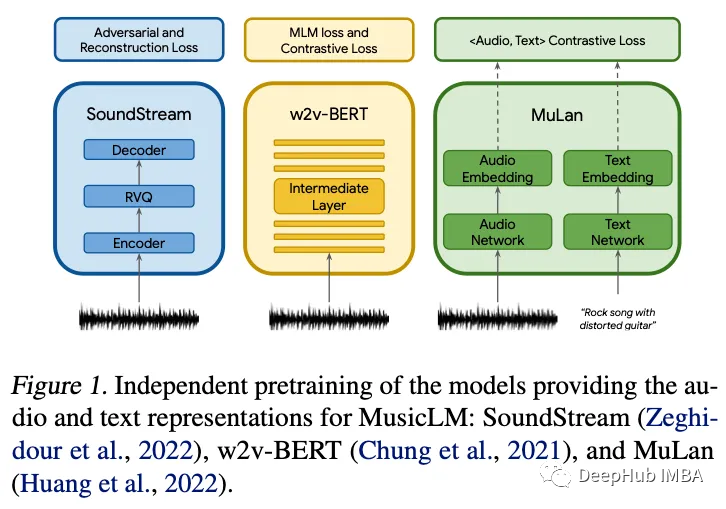
2023年2月的十篇深度学习论文推荐
本月的论文包括语言模型、扩散模型、音乐生成、多模态等主题。
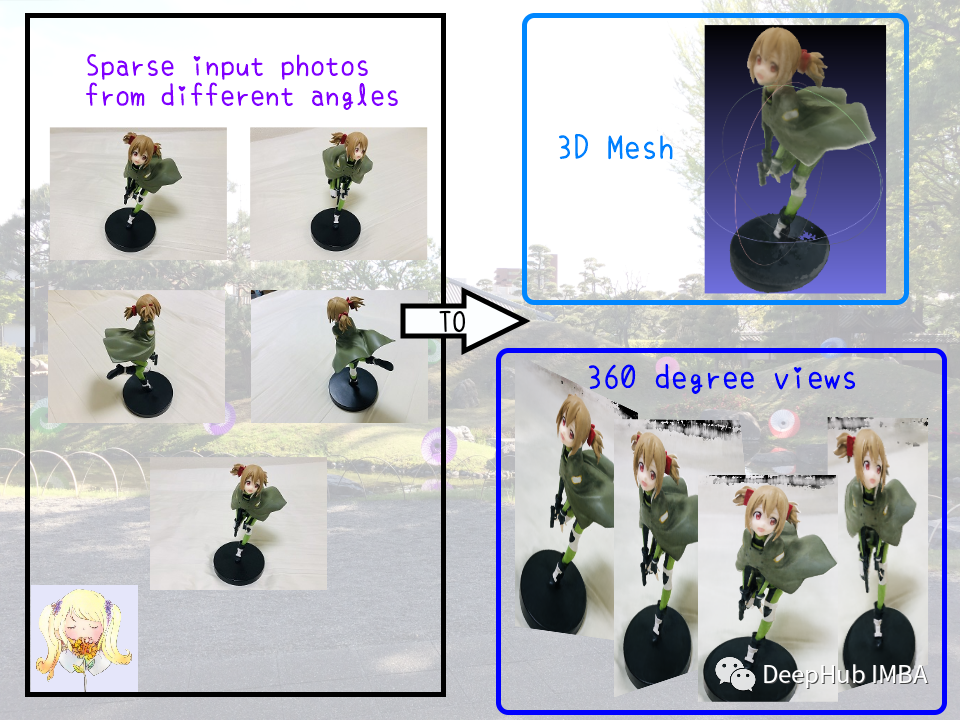
100行Pytorch代码实现三维重建技术神经辐射场 (NeRF)
提起三维重建技术,NeRF是一个绝对绕不过去的名字。本文通过100行的Pytorch代码实现最初的 NeRF 论文。
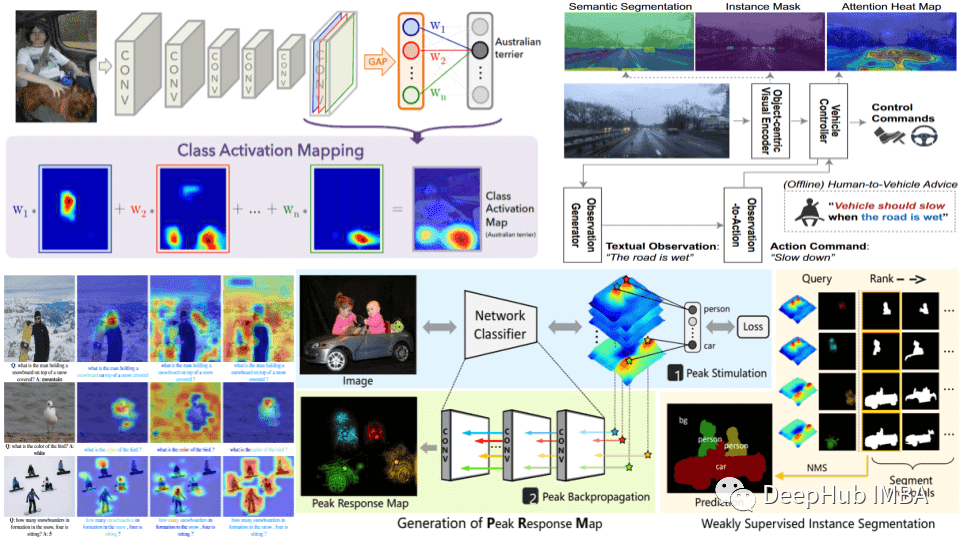
10个用于可解释AI的Python库
XAI的目标是为模型的行为和决定提供有意义的解释,本文整理了目前能够看到的10个用于可解释AI的Python库

GPT-3 vs Bert vs GloVe vs Word2vec 文本嵌入技术的性能对比测试
本文将GPT3与三种传统文本嵌入技术GloVe、Word2vec(Mikolov ,2013 年)和 BERT生成的嵌入进行性能的简单对比。
pytorch-lightning安装
一般pytorch-lightning 需要torch版本≥1.8.0。在安装pytorch-lightning时一定注意自己的torch是pip安装还是conda安装,两者要保持一致,不然会导致安装pytorch-lightning时会直接卸载掉你的torch,安装cpu版本的torch。http
使用scikit-learn为PyTorch 模型进行超参数网格搜索
scikit-learn是Python中最好的机器学习库,而PyTorch又为我们构建模型提供了方便的操作,要让PyTorch 模型可以在 scikit-learn 中使用的一个最简单的方法是使用skorch包
Mask R-CNN讲解
Mask R-CNN最全讲解
YOLOv5中的CSP结构
深度学习入门小菜鸟,希望像做笔记记录自己学的东西,也希望能帮助到同样入门的人,更希望大佬们帮忙纠错啦~侵权立删。目录一、背景知识 -- CSPNet二、CSP结构分析1、总括2、CSP1_X结构3、CSP2_X三、源码分析(内含注释分析)一、背景知识 -- CSPNet有关CSPNet的介绍分析可以
语义分割系列6-Unet++(pytorch实现)
本文介绍了Unet++网络,在pytorch框架上复现Unet++,并在Camvid数据集上进行训练。

机器学习评估指标的十个常见面试问题
评估指标是用于评估机器学习模型性能的定量指标。本文整理了10个常见的问题。
PatchCore原理与代码解读
随机下采样会丢失 \(\mathcal{M} \) 中的有用信息,本文使用coreset subsampling方法来减小 \(\mathcal{M} \),coreset selection旨在找到一个子集 \(\mathcal{S}\subset \mathcal{A}\),对于通过 \(\m
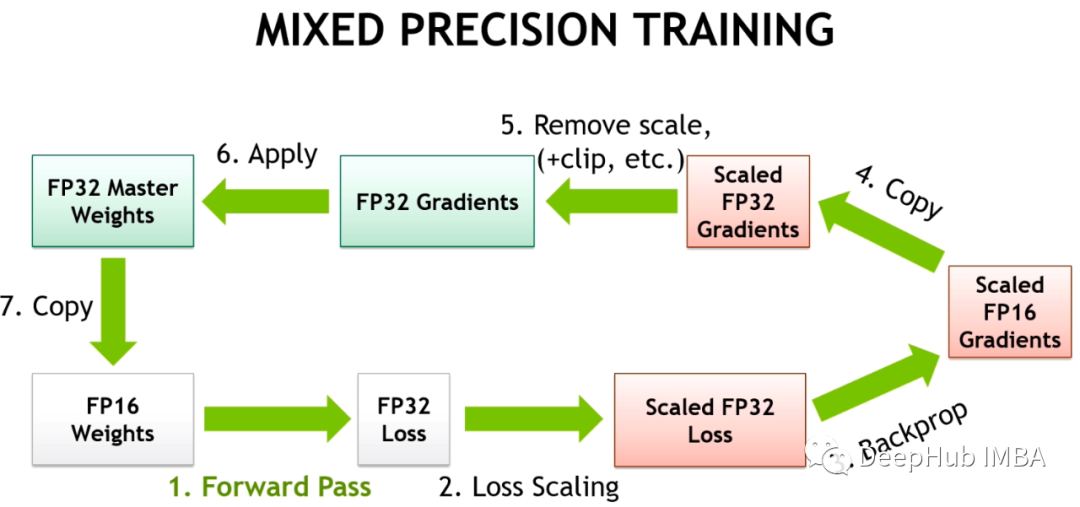
如何解决混合精度训练大模型的局限性问题
混合精度已经成为训练大型深度学习模型的必要条件,但也带来了许多挑战。在这篇文章中,我们将讨论混合精确训练的数值稳定性问题。
人工智能之深度学习常见应用方向你都了解吗?(文末包邮送书5本)
1. 数字识别2. 图像识别3. 图像分类4. 目标检测5. 人脸识别6. 文本分类7. 聊天机器人
GANs系列:DCGAN原理简介与基础GAN的区别对比
参考了DCGAN论文,对论文逐步解读,将论文精华部分进行了概括提取,包括原理、应用以及训练过程。在基础的生成式对抗神经网络的基础上,进一步介绍DCGAN深度卷积生成对抗神经网络。



