升级篇:超详细ChatGPT(GPT 4.0)论文润色指南+最全提示词——持续更新
不看后悔!ChatGPT 4.0一站式论文助攻指南,革新论文写作方式。
【AIGC】Visual ChatGPT 视觉模型深度解析
本文万字详解图文版 ChatGPT的原理与使用。介绍Visual ChatGPT的处理流程、操作实例、技术原理、系统架构、模块说明、基本规则,Github下载方法、运行指南、代码解读、常见错误,论文解读。
文心一言发布,你怎么看?chatGPT
百度全新一代知识增强大语言模型“文心一言”的发布,是一项重大的科技创新和突破。它将会对自然语言处理技术的发展和进步带来积极的影响和推动,同时也将为我们的日常生活和工作带来更多的便利和智能化。我们期待着文心一言能够在未来的发展中取得更加优秀和出色的成果。
AI绘画进军三次元,有人用它打造赛博女友?(diffusion)
AI绘画大模型从学术界走入公众视野,对此你怎么看?欢迎大家体验
路径规划 | 图解动态A*(D*)算法(附ROS C++/Python/Matlab仿真)
D*算法是一种增量式路径规划算法,可以同时兼容静态环境和存在未知动态变化的场景。本文图解D*算法原理,并提供ROS C++、Python、Matlab三种仿真环境的实验代码
Python跳动的爱心
Python跳动的爱心代码。
ChatGPT-4 终于来了(文末附免费体验地址)
大家好,我是小钱学长,每天教你一个赚小钱的小技巧。ChatGPT4.0 重磅来袭,今天一打开plus页面出现的就是这个GPT-4的体验界面!现在就带大家一起看看GPT4.0。进入之后是这样的看到最下面有一行话,目前应该是4个小时限制100条消息。
[AI生成图片] 效果最好的Midjourney 的介绍和使用
效果最好,最容易上手的的文字生成图片的工具
反向传播神经网络(BPNN)的实现(Python,附源码及数据集)
本文对反向传播神经网络(BPNN)的理论基础进行介绍,之后使用Python实现基于BPNN的数据预测,通俗易懂,适合新手学习,附源码及实验数据集。
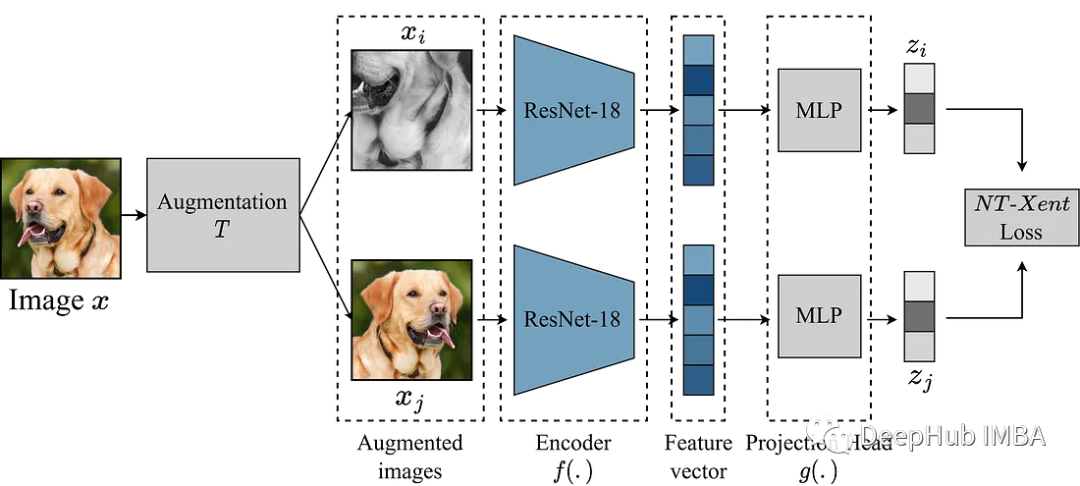
使用Pytorch实现对比学习SimCLR 进行自监督预训练
SimCLR(Simple Framework for Contrastive Learning of Representations)是一种学习图像表示的自监督技术。SimCLR 已被证明在各种图像分类基准上优于最先进的无监督学习方法。
ChatGPT集合清单!几十个AI网站甚至GPT4免费使用[⭐建议收藏⭐]
收集到的关于Chat GPT的相关网站,希望正在找这方面资源的朋友有所帮助,后面也会持续更新的。
自动化测试,我猜它是你想要的优选
龙测科技AI-TestOps云平台,一站式自动化测试工具,使用体验下来确实是无可挑剔,同时呢,在ARM技术的支持下,龙测科技拥有涵盖市面上绝大部分软硬件系统的UI功能产品体系,凭借全球领先的测试代码生成器技术、测试代码一键自动生成等能力,为行业客户提供高效、可维护、低成本的自动化测试工具,为产品质量
探索图文处理的未来:知名学府与合合信息团队分享NLP实践经验,人工智能引领技术革新
根据众位学术技术大咖的分享来看,未来图文智能处理的发展将会更加智能化、自动化和可定制化。具体来说,未来的图文智能处理技术将会更加注重生成式人工智能技术的应用,例如深度学习、自然语言处理、计算机视觉等。这将使得处理效果更加准确和高效。同时,未来的图文智能处理技术将会更加自动化,例如自动识别文档类型、自
如何用AI制作电影级镜头?Midjourney v5体验教程(附prompts大全)
在ChatGPT4.0发布后,由Midjourney研究实验室紧随其后发布了Midjourney v5版本,在镜头语言、光影渲染等方面更自然。本文带大家体验Midjourney v5,并附prompts大全
微软New Bing初体验:AI时代的搜索引擎(内含体验方法)
本篇博文体验AI时代的搜索引擎 : 微软New Bing。相信很多人还没有体验过吧,是申请失败吧?文末告诉你方法,秒过!
【Pytorch】利用PyTorch实现图像识别
利用PyTorch实现图像识别的相关知识
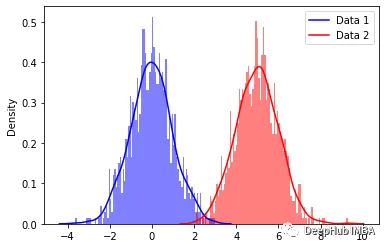
高斯混合模型 GMM 的详细解释
高斯混合模型(后面本文中将使用他的缩写 GMM)听起来很复杂,其实他的工作原理和 KMeans 非常相似,你甚至可以认为它是 KMeans 的概率版本。 这种概率特征使 GMM 可以应用于 KMeans 无法解决的许多复杂问题。
微信小程序 |基于百度AI从零实现人脸识别小程序
本文项目是一款完美适配微信端的实时人脸识别小程序,相比与互联网上已有的人脸识别解决方案,本项目通过实时动态识别小程序端所获取的照片帧,从而自动触发人脸识别和登录!完全贴合实际,真正的拿来即用!项目前端基于 uniapp+vue,后端基于python+flask。完整项目源码参考文章内容,教你手把手从
AI 绘画 stable diffusion webui 常见模型汇总及简介
主要是记录索引一下常见的 AI 绘画作画模型,方便自己用。主要收集 stable diffusion webui 用大模型(ckpt与safetensors)包括了常见的模型比如的Waifu Diffusion、anything、f222、basil mix、urpm 、chillout mix等模
机器学习:基于KNN对葡萄酒质量进行分类
KNN对葡萄酒质量进行分类。该数据集采集于葡萄牙北部“Vinho Verde”葡萄酒,由于隐私和物流问题,只有理化变量特征是可以进行使用的(例如,数据集中没有关于葡萄品种、葡萄酒品牌、葡萄酒销售价格等的数据)。本篇notebook使用了红葡萄酒质量的数据集,并用KNN进行分类模型的训练。



