Pydantic v2 入门教程:模型、字段、验证器
本问将覆盖 API 的每个核心部分:定义模型、约束字段、写验证器、组合嵌套结构、控制序列化。所有示例基于 **Pydantic v2** 和 **Python 3.10+**,每个清单完整可运行。
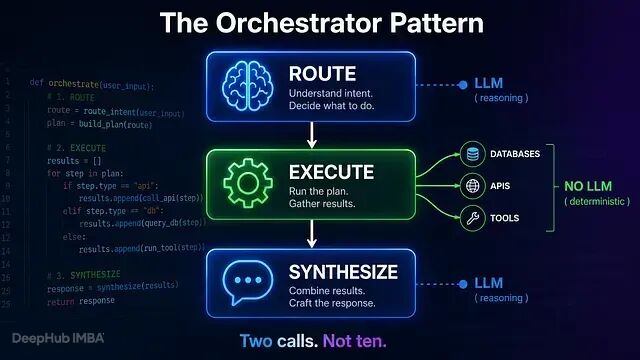
Orchestrator 为什么比 Agentic Loop 快:LLM 决策与执行分离的架构解析
Agentic loop 适合前期的探索工作,而Orchestrator 适合生产。
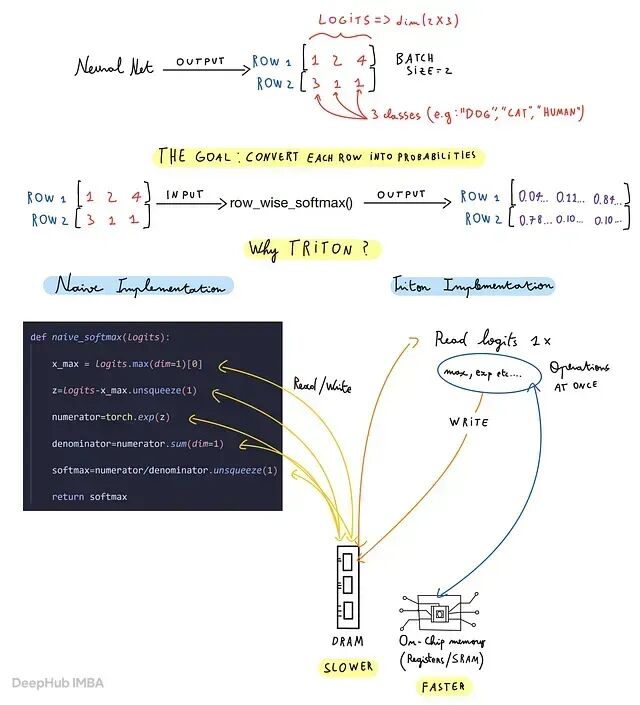
手写 Triton Softmax Kernel:程序实例、块大小、mask 与指针算术
以官方 Triton 教程为基础,深入代码背后的原理并配上手绘图解。如果你觉得 GPU 编程教程总是太晦涩,这篇文章正好可以用来入门。
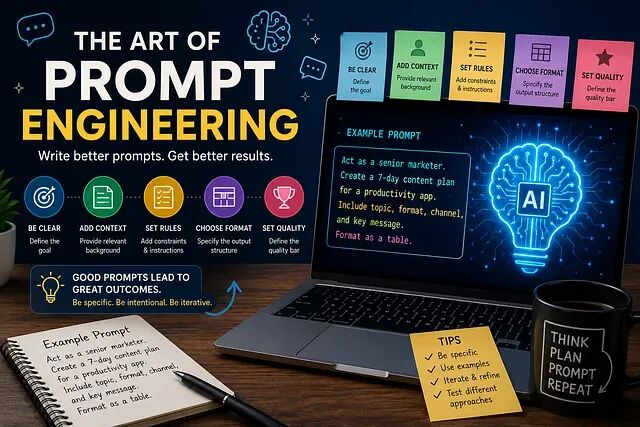
Prompt Engineering 的本质:角色、任务、上下文、格式、约束
Prompt engineering 就是用来填这个坑的,它是一种和 AI 系统沟通的方法——表达得足够清晰、足够精确,让模型的第一反应就了解你的真实意图。
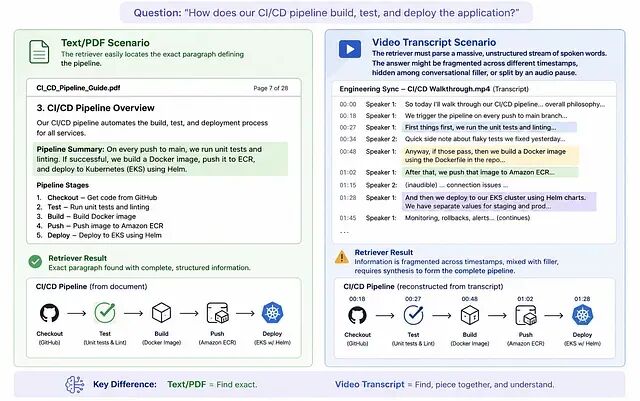
视频 RAG 中分块策略:基于停顿、滑动窗口与基于 LLM 的方法
文本的RAG我们都已经很熟悉了,但是如果数据以原始视频转录文本的形式存储,没有合适的时间结构,那么相比标准的 PDF 或文本文档,如何检索视频里面的内容呢?
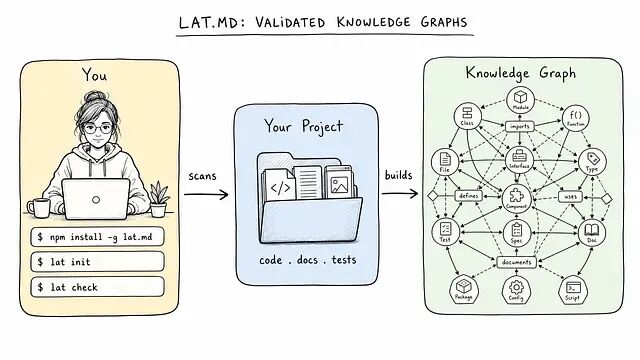
lat.md:将任意项目代码转换为可查询的知识图谱
lat.md让我们不再停留在“搜索”信息,而是面向一张组织有序、经过校验的项目地图。把笔记直接挂到代码上,再让它们的一致性接受自动校验,AI 工具因此变得更聪明、更可靠。
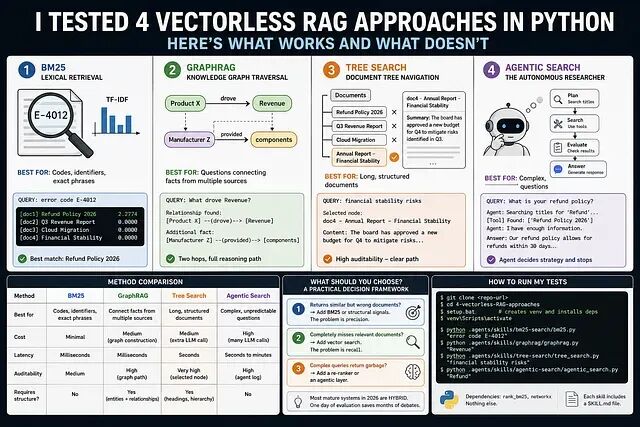
四种无向量RAG 方案实测:BM25、GraphRAG、Tree Search、Agent
四种方法都查这一份数据集,但每种方法分别使用刻意挑选、能发挥其长处的查询。得到的结果是:没有任何一种方法是通用的。
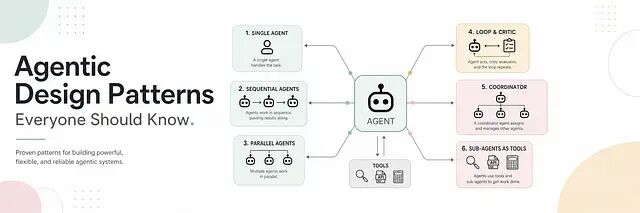
Agentic 设计模式拆解:6 种结构的优缺点与应用场景
所以这篇文章总结一些常见的设计模式,这些模式归纳了在大量已验证实现中反复出现的共性,可以视为一组结构化的骨架,用来理解智能体(Agent)、用户、模型和工具之间的核心交互。
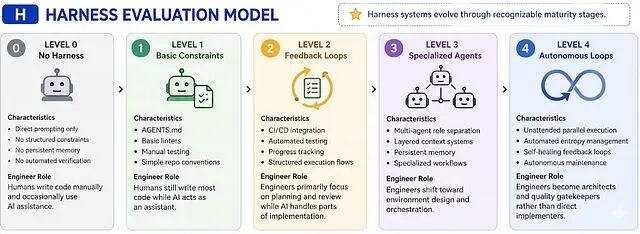
从零搭建 Harness Engineering 框架 :Rule、Skill、Sub-Agent等工程落完整路径
Harness 这个词听起来宽泛而且像一种抽象的方法论。如果它没法落到具体的目录结构、文档、脚本和工作流上,那就只是一句漂亮口号。
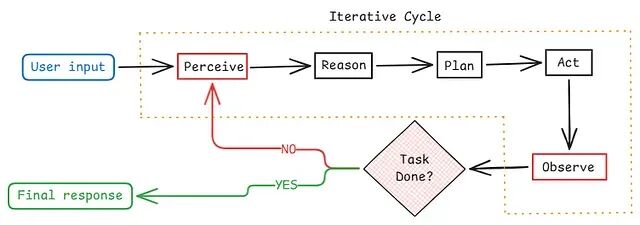
推理 → 行动 → 观察:用 LangChain + Python 实现一个智能体循环
下面这篇介绍会说明它是什么、如何工作,以及如何把它实现出来。
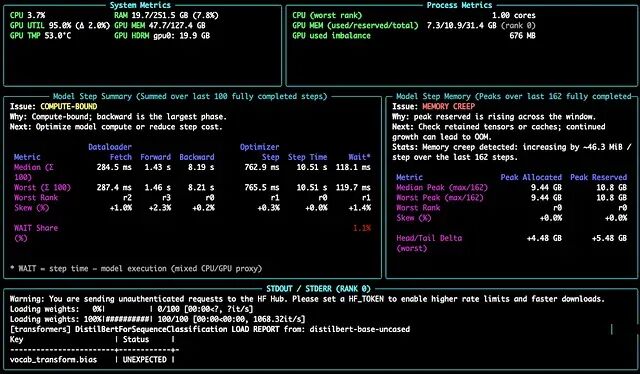
TraceML:用三行代码为训练循环加入 step 级诊断
TraceML 是开源的目前支持单 GPU 以及单节点 DDP/FSDP;多节点支持很快会推出。
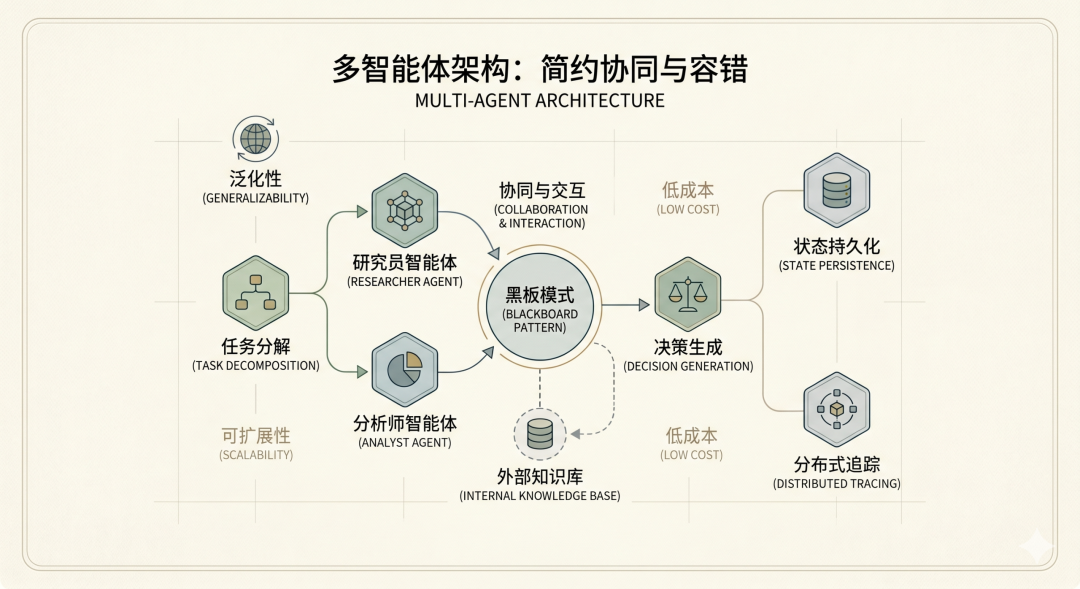
告别脆弱的单体应用,用多智能体网络构建稳定的生产力工具
本文深度解析了 AI 应用从单体大模型向多智能体(Multi-Agent)架构演进的技术趋势与工程实践。面对复杂业务,多智能体系统凭借角色分工与优雅降级展现出极强的泛化性
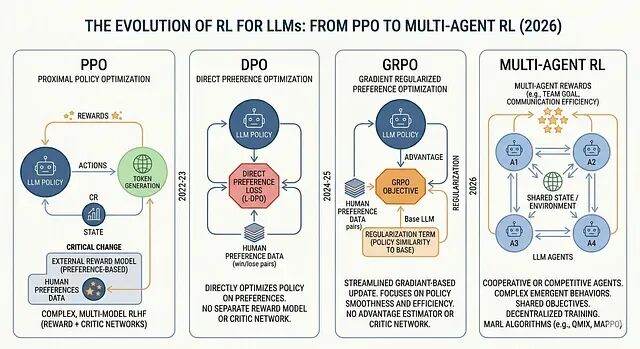
2026 年面向 LLM 的 RL方法总结:从 PPO 到 DPO 到 GRPO,再到多智能体 RL
本文是对当前格局的一次梳理。会用一点篇幅讲历史,更多篇幅留给 PPO、DPO、GRPO 和 MARL——它们是什么、各自适合什么场景、实际中会在哪里坏掉,以及今天的开源技术栈大概长什么样。
构建一个可自我改进的多 Agent RAG 系统:架构、评估,以及带人工审核的 Prompt 反馈闭环
本文描述的系统包含一个自我改进的评估闭环:自动定位表现不佳的 Prompt 维度,给出有针对性的改写方案,并通过一道由量化回归检测把关的人工审批步骤来决定是否上线。

Agent = Model + Harness:模型决定上限Harness 决定下限
Harness 不是一块单一的基础设施而是一层一层叠起来的能力栈。
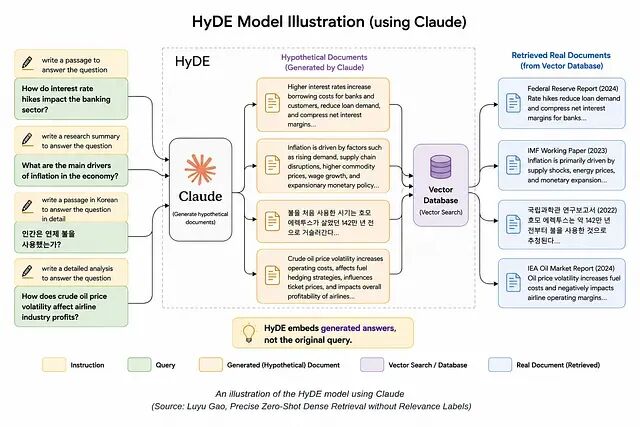
HyDE :让 RAG 检索从"匹配关键词"升级到"理解意图"
**Hypothetical Document Embeddings(HyDE)** 不是"搜索文档",而是让系统在检索开始之前,先想清楚理想答案应该长什么样。
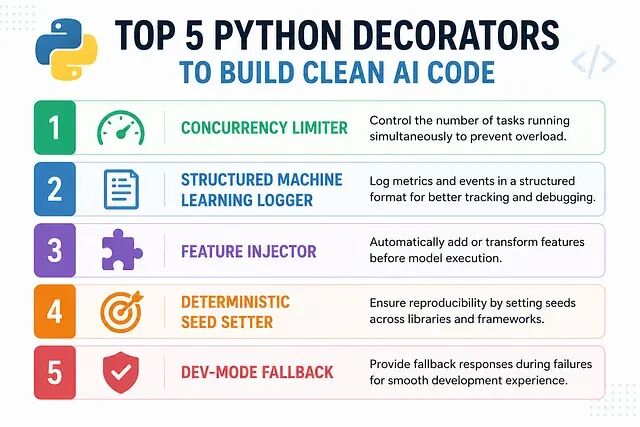
让机器学习 Pipeline 更稳的 5 个 Python 装饰器代码
下面介绍 5 个适合现代 AI 开发流程的 Python 装饰器。
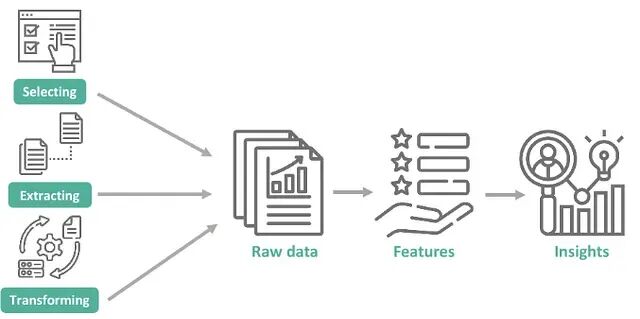
Feature Engineering 实战:Pandas + Scikit-learn的机器学习特征工程的完整代码示例
Feature engineering 是机器学习 pipeline 里最关键的一环。
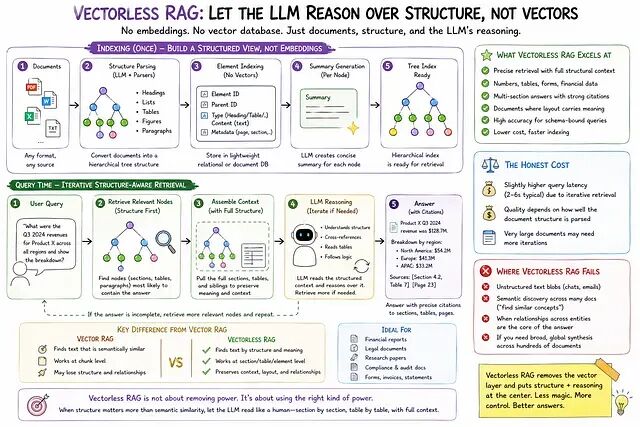
2026 RAG 选型指南:Vector、Graph、Vectorless 该怎么挑
这篇文章将介绍它们之间的差异,让你不必花三周读论文也能为自己的系统做出正确选择。



