计算机视觉可解释性——将特征图的某一通道转化为一张图来可视化
本实验是将某一层的特征图中的某一通道对其进行的可视化,有两种方式一种是使用opencv;另一种是使用tensorboard。运行结果使用的resnet50作为backbone的效果更好,将layer1的特征中第一层通道(256中的第1层)转化为图像 layer1. channels1.将layer1
网易云信获计算机视觉国际权威赛事冠军,超分辨率技术性能问鼎全球
本月,计算机视觉和模式识别领域顶级会议 CVPR 将在美国新奥尔良市举办,同期计算机图像恢复领域最具影响力的全球性赛事 NTIRE 将在会上颁奖。在 NTIRE 高效率超分辨率挑战赛中,网易云信音视频实验室从众多参赛团队中脱颖而出,在总体性能赛道以明显优势获得冠军,展现了云信在视频超分技术领域的顶尖
多目标跟踪(MOT)--DeepSort原理及代码详解
对多目标跟踪(MOT)进行简要概述同时对其中DeepSort算法的总体框架、流程及各模块的实现原理、方法和代码复现进行了详细的讲解
基于特征点检测的人脸融合技术
所谓人脸融合:给定输入人脸A、B,输出的人脸C具有A和B共同的特征,是一张全新的人脸,也可以说是一张假脸。人脸融合的过程主要有三步:人脸特征点定位,人脸融合,人脸交换。第一步,通过深度学习训练的模型对两张待融合的图像进行关键点定位;第二步,根据定位结果对人脸进行融合;第三步,将融合得到的人脸交换到待
YOLOX网络结构详解
在之前文章中我们已经聊过YOLO v5了,今天我们再来聊聊YOLOX。YOLOX是旷视科技在2021年发表的一篇文章,当时主要对标的网络就是很火的YOLO v5,如果对YOLO v5不了解的可以看下我之前的文章。那么在YOLOX中引入了当年的哪些黑科技呢,简单总结主要有三点,decoupled he
人工智能-关于CV的这些简单操作你真的都会了吗?
🎉作者简介:👓目前在读计算机研究生。主要研究方向是人工智能和群智能算法方向。目前熟悉python网页爬虫、机器学习、计算机视觉(OpenCV)、群智能算法。然后正在学习深度学习的相关内容。以后可能会涉及到网络安全相关领域,毕竟这是每一个学习计算机的梦想嘛!👓📝目前更新:🎯目前已经更新了关于
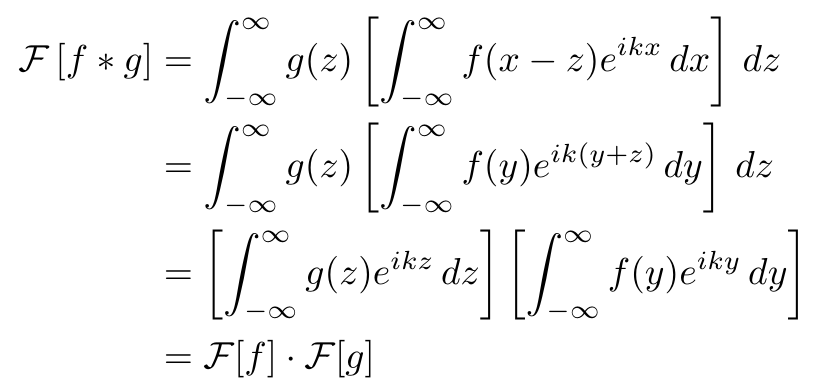
卷积神经网络中的傅里叶变换:1024x1024 的傅里叶卷积
本文介绍了卷积和DFT背后的数学理论,通过观察不同的光谱获得了一些想发,并且通过TensorFlow进行了实现,并验证了结果的正确性。
OCR文字识别经典论文详解
本篇将介绍文字识别经典论文,内容包括文字检测、文字识别、端到端识别等方法,具体将分别对论文算法简介、思路、代码等几个部分展开介绍。目前各部分只举例经典论文,算法没有全部写完,后续会将在此部分基础上更新更多论文综述及代码实战部分。............
opencv 傅里叶变换(python)
图像处理一般分为空间域处理和频率域处理。空间域处理是直接对图像内的像素进行处理。空间域处理主要划分为灰度变换和空间滤波两种形式。频率域处理是先将图像变换到频率域,然后在频率域对图像进行处理,最后再通过反变换将图像从频率域变换到空间域。时间差,在傅里叶变换里就是相位。相位表述的是与时间差相关的信息。在

论文推荐:TResNet改进ResNet 实现高性能 GPU 专用架构并且效果优于 EfficientNet
论文首先讨论了面向 FLOP 的优化引起的瓶颈。然后建议更好地利用 GPU 结构的设计。最后引入了一个新的 GPU 专用模型,称其为 TResNet。
【深度学习】AI一键换天
基于视觉的视频天空替换和协调方法,该方法可以在具有可控风格的视频中自动生成逼真的天空背景。与以前的天空编辑方法专注于静态照片或需要集成在智能手机中的惯性测量装置拍摄视频不同,该方法完全基于视觉,对捕获设备没有任何要求,并且可以很好地应用于在线或离线处理场景。...
Python 人脸识别系统
简介人脸识别不同于人脸检测。在人脸检测中,我们只检测了人脸的位置,在人脸识别任务中,我们识别了人的身份。本文重点介绍使用库 face_recognition 实现人脸识别,该库基于深度学习技术,并承诺使用单个训练图像的准确率超过 96%。识别系统用例寻找失踪者识别社交媒体上的帐户识别汽车中的驾驶员考
浅谈非极大值抑制和IOU
非极大值抑制,简称NMS,是一种获取局部最大值的有效算法。不管是one-stage还是two-stage,NMS都是其中的重要一环,被广泛应用于各种目标检测算法中。下面以一个例子来简述非极大值抑制在目标检测中的应用。在实际检测过程中,一个目标往往会检测出多个region proposal很多时候,我
零基础入门YOLOv5——从制作数据集到最终训练与测试
零基础入门YOLOv5——从制作数据集到最终训练与测试 提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加例如:第一章 Python 机器学习入门之pandas的使用提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录零基础入门YOLOv5——从制作数据集到最终训练
OPENCV图像直方图以及均值化
直方图是我们在照片中使用来查看图像中每个值有多少像素,照片中的每个像素的值都从0(黑色)到255(白色),图的左侧代表音阶的暗色调,右侧代表较亮的色调。在彩色摄影中,每个像素对于每种颜色都有其自己的值(0-255)。图片中的直方图显示了每种颜色(红色,蓝色和绿色)的像素值分布.图像直方图,也叫灰度直
机器学习SVD作业
作业作业1:利用SVD分解,完成china.jpg文件的压缩与显示。代码from skimage import ioimport matplotlib.pyplot as pltimport numpy as npdef getImgAsMatFromFile(filename): img =
立体匹配入门指南(8):视差图、深度图、点云
视差图、深度图和点云
Python图像处理丨图像缩放、旋转、翻转与图像平移
本篇文章主要讲解Python调用OpenCV实现图像位移操作、旋转和翻转效果,包括四部分知识:图像缩放、图像旋转、图像翻转、图像平移。
计算机视觉——单目相机标定
计算机视觉——单目相机标定文章目录计算机视觉——单目相机标定前言OpenCV相机标定流程1. 数据集2. 角点提取3. 内参外参求解4. 误差评估实验分析前言什么是相机标定:在计算机视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何
CUDA实例系列四:利用GPU加速Sobel边缘检测(含源码)
CUDA实例系列四:利用GPU加速Sobel边缘检测先简单的介绍一下Sobel边缘检测:Sobel算子是图像处理中常用的算子之一, 在计算机视觉中常用来做边缘检测. 它是一个比较小并且是整数的filter, 所需要的计算相对较少, 但是对于图像中频率变化较高的地方,他所得的梯度近似值会比较粗糙.它包



