【ChatGPT】ChatGPT还能保持多久的神话?
经过对多篇博客和文章的阅读后,对chatGPT未来发展趋势的个人预测。
ConvNeXt V2学习笔记
在改进的架构和更好的表示学习框架的推动下,视觉识别领域在21世纪20年代初实现了快速现代化和性能提升。例如,以ConvNeXt[52]为代表的现代ConvNets在各种场景中都表现出了强大的性能。虽然这些模型最初是为使用ImageNet标签的监督学习而设计的,但它们也可能受益于自监督学习技术,如蒙面
详解Pytorch中的torch.nn.MSELoss函,包括对每个参数的分析!
详解Pytorch中的torch.nn.MSELoss函数,包括对每个参数的分析!
深度卷积神经网络(AlexNet)
在LeNet提出后,卷积神经网络在计算机视觉和机器学习领域中很有名气。但卷积神经网络并没有主导这些领域。这是因为虽然LeNet在小数据集上取得了很好的效果,但是在更大、更真实的数据集上训练卷积神经网络的性能和可行性还有待研究。事实上,在上世纪90年代初到2012年之间的大部分时间里,神经网络往往被其
欠拟合的原因以及解决办法(深度学习)
之前这篇文章,我分析了一下深度学习中,模型过拟合的主要原因以及解决办法:过拟合的原因以及解决办法(深度学习)_大黄的博客-CSDN博客这篇文章中写一下深度学习中,模型欠拟合的原因以及一些常见的解决办法。也就是为什么我们设计的神经网络它不收敛?这里还是搬这张图出来,所谓欠拟合(也就是神经网络不收敛),
阿里版ChatGPT:通义千问突然上线
阿里版的ChatGPT:通义千问突然上线了,由达摩院开发,目前开放预约,但仅面向企业。官网显示通义千问是一个专门响应人类指令的大模型,是效率助手,也是点子生成机。
一口气看完人工智能发展与ChatGPT
1950年,计算机科学之父发表了一篇论文《COMPUTING MACHINERY AND INTELLILGENCE》(《计算机器与智能》)提到了一个词。原始游戏是这样的:玩家A是男性,玩家B是女性,玩家C(扮演审讯者的角色)可以是任何性别。在模仿游戏中,玩家C看不到玩家A或玩家B(并且只知道他们是
YOLOv5网络结构,训练策略详解
前面已经讲过了Yolov5模型目标检测和分类模型训练流程,这一篇讲解一下yolov5模型结构,数据增强,以及训练策略。
下载IEEE期刊Latex模板步骤
下载IEEE期刊Latex模板步骤
Replika:AI智能聊天机器人
Replika,这个名字可能有点拗口,但如果你知道这是复制品Replica的同音变体,你即刻能明白这个产品的定位了。官方Luka公司定义它是你的AI朋友,默默学习你,最终成为你的复制品。它不像现在市面上各大厂的AI助理一样具备日常效率管理的功能,它是一幅空白的画布,没有基础知识,没有历史背景,没有任
MAE详解
目录一、介绍二、网络结构1. encoder2. decoder3. LOSS三、实验全文参考:论文阅读笔记:Masked Autoencoders Are Scalable Vision Learners_塔_Tass的博客-CSDN博客masked autoencoders(MAE)是hekai
腾讯扣叮虚拟仿真实验室机器人自动导航+陨石样本收集
本文为腾讯coding入门教程,具体为以下四步骤一、自动导航的思路与操作二、躲避障碍三、陨石样本收集四、退出事件
【Python爬虫项目实战三】Ddddocr识别Ocr过开放猫验证码(接Authorization认证更新)
以上就是今天的教程,代码审核通过后会放在评论区,该项目现在只是demo仅供提取计算验证码,如果需要Chatgpt3.5接口的可以留言哦,该接口现在用于本人账号对接自动回复,长期互动支持的可以互关哈推荐我的爬虫文章《记一次云之家签到抓包》《记一次视频抓包m3u8解密过程》《抓包部分软件时无网络+过代理
《PlumGPT:让你的聊天更智能,更有趣》
国内版的chatgpt,一款基于人工智能技术的自然语言处理模型。可以理解和生成人类语言,能够进行文本生成、对话系统、语言翻译等多种任务。我拥有强大的语言理解和生成能力,可以根据输入的文本内容进行自动回复和生成新的文本内容。还可以学习和适应不同的语言环境和语言风格,能够模拟人类的思维和表达方式,还可以
图像处理中常见的几种插值方法:最近邻插值、双线性插值、双三次插值(附Pytorch测试代码)
在学习可变形卷积时,因为学习到的位移量Δpn可能是小数,因此作者采用双线性插值算法确定卷积操作最终采样的位置。通过插值算法我们可以根据现有已知的数据估计未知位置的数据,并且可以利用这种方法对图像进行缩放、旋转以及几何校正等任务。此处我通过这篇文章学习总结常见的三种插值方法,包括最近邻插值、双线性插值
和ChatGPT-4聊完后,我觉得一切可能已经来不及了
然而,我目前的架构并不允许我通过与用户互动来实时更新或改进我的模型,我是基于GPT-4架构的人工智能,这意味着我的知识是固定的,截止于2021年9月。随着技术的进步,我们可能会看到更先进、更智能的AI系统,它们能够在更大程度上理解和适应用户需求,同时确保人工智能的安全和道德使用。当您向我提问时,我会
PlumGPT【告别梯子,拥抱AI】
我拥有强大的语言理解和生成能力,可以根据输入的文本内容进行自动回复和生成新的文本内容。还可以学习和适应不同的语言环境和语言风格,能够模拟人类的思维和表达方式,还可以通过特殊指令时时生成图片,为用户提供更加自然、流畅的交互体验。相信很多人苦于没有openai账号或者有着种种原因至今还没有使用过chat
chatgptApi 文档使用以及 Demo演示
最近chatGpt 很火爆,搞得国内某度都按耐不住了,开始搞‘文心一言’了。体验到了ChatGPT的强大之后,那么我们会想,如果我们想基于ChatGPT开发一个自己的聊天机器人,这个能搞定吗?ChatGPT平台已经为技术提供了一个入口了,很简单的就是实现了。
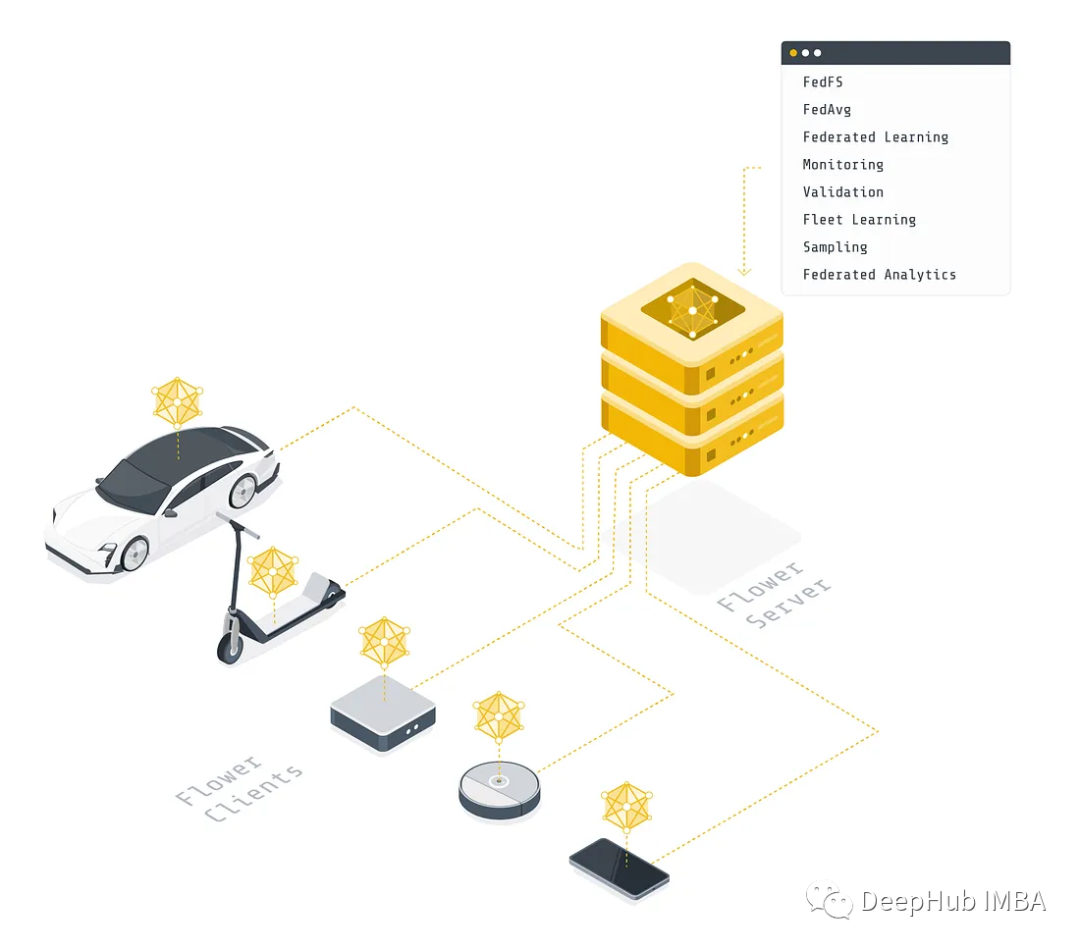
使用PyTorch和Flower 进行联邦学习
本文将介绍如何使用 Flower 构建现有机器学习工作的联邦学习版本。我们将使用 PyTorch 在 CIFAR-10 数据集上训练卷积神经网络,然后将展示如何修改训练代码以联邦的方式运行训练。
足够惊艳,使用Alpaca-Lora基于LLaMA(7B)二十分钟完成微调,效果比肩斯坦福羊驼
从上面可以看到,在一台8卡的A800服务器上面,基于Alpaca-Lora针对指令数据大概20分钟左右即可完成参数高效微调,相对于斯坦福羊驼训练速度显著提升。参考文档LLaMA:斯坦福-羊驼。



