GPU版pytorch安装成功却无法使用cuda
因为这个大坑,可以说浪费了一整个晚上的时间,在借鉴了很多博客之后,下面这个博主的博客可以说是一个超级好的解决方法。在远程服务器安装pytorch,根据官网命令进行安装,但在完成之后,显示GPU不可用,故记录此大坑。安装结束之后,输入以下代码进行安装验证却显示没有成功安装!按照这个博客的引导,使用pi
Windows 下 AMD显卡训练模型有救了:pytorch_directml 下运行Transformers
注意,如果直接使用pipeline可能会有问题,应该是pipeline不兼容导致的。只需要自己编写具体代码,避开pipeline即可。amd GPU占用率能上去。
人工智能(Pytorch)搭建模型5-注意力机制模型的构建与GRU模型融合应用
大家好,我是微学AI,今天给大家介绍一下人工智能(Pytorch)搭建模型5-注意力机制模型的构建与GRU模型融合应用。注意力机制是一种神经网络模型,在序列到序列的任务中,可以帮助解决输入序列较长时难以获取全局信息的问题。该模型通过对输入序列不同部分赋予不同的权重,以便在每个时间步骤上更好地关注需要
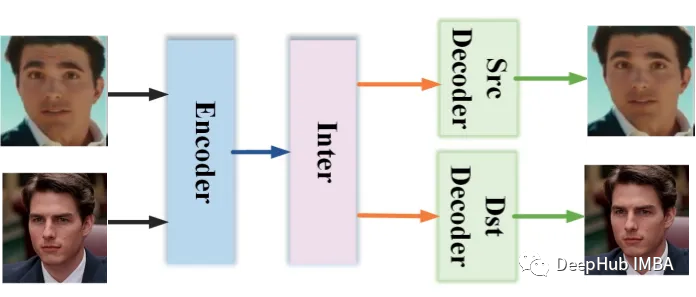
使用Pytorch和OpenCV实现视频人脸替换
“DeepFaceLab”项目已经发布了很长时间了,作为研究的目的,本文将介绍他的原理,并使用Pytorch和OpenCV创建一个简化版本。
锂电池寿命预测 | Pytorch实现基于Transformer 的锂电池寿命预测(NASA数据集)
锂电池寿命预测 | Pytorch实现基于Transformer 的锂电池寿命预测(NASA数据集)
模型训练时使用的 model.train() 和模型测试时使用的 model.eval()
这种模式适用于训练阶段,由于 Dropout 在每次迭代时随机关闭神经元,因此可以减少神经元之间的相互依赖,使得模型泛化能力更强。这种模式适用于测试阶段,在测试阶段,我们通常关注的是模型的输出结果,而不是模型内部的 Dropout 或 Batch Normalization 操作。因此,在测试阶段,
【人工智能概论】 PyTorch可视化工具Tensorboard安装与简单使用
PyTorch可视化工具Tensorboard安装与简单使用
Pytorch自定义数据集模型完整训练流程
我们以kaggle竞赛中的猫狗大战数据集为例搭建Pytorch自定义数据集模型训练的完整流程。
跑YOLOv5遇到的问题
自己在跑YOLOv5过程中遇到的一些问题
怎么下载适合cudn12.0版本的pytorvh
可以通过以下步骤来下载适合 CUDA 12.0 版本的 PyTorch:打开命令行/终端。运行以下命令:pip install torch==1.7.1+cu12 torchvision==0.9.0+cu12 torchaudio==0.9.0 -f https://download.pytorc
pytorch安装
pytorch安装
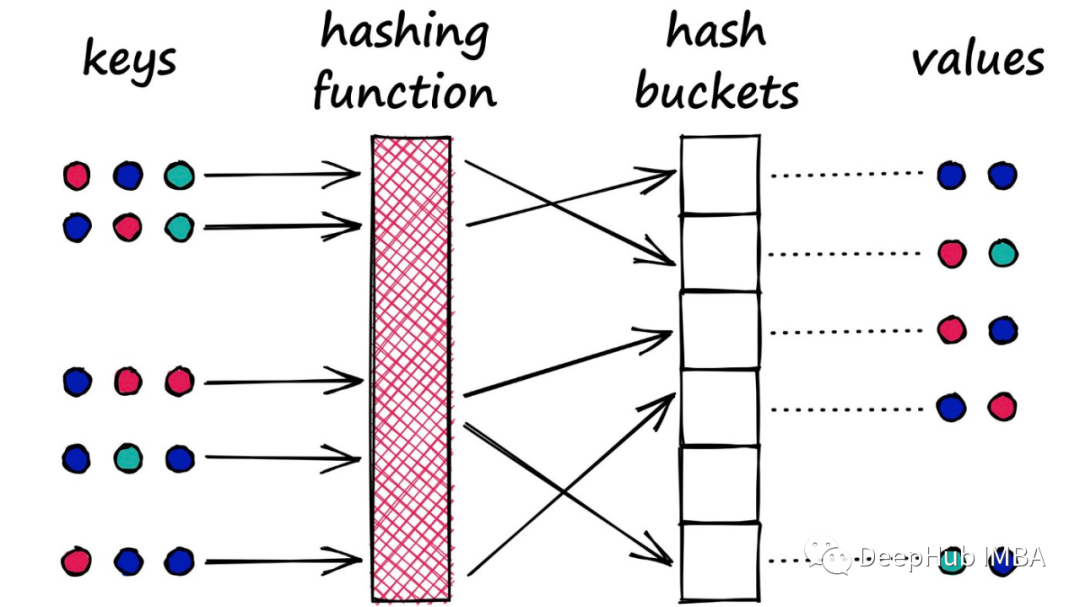
使用LSH 进行特征提取
局部敏感哈希(LSH)通常用于近似最近邻算法(ANN) 操作(向量搜索)。LSH的特性也可以在以矢量为输入的神经网络模型中得到利用(例如,各种的音频、视频和文本嵌入等内容信号)。
WSL安装Ubuntu及配置Pytorch
在深度学习中经常会用到linux环境,但是相对于windows,对于作者这样的小白,使用linux肯定不是首选,但是最近用到了某些包,只能在linux环境下使用,在安装双系统时,发现了WSL2,尝试了一下很好用,所以记录一下安装教程,如果不习惯于linux,可以尝试使用。
ResNet代码复现+超详细注释(PyTorch)
ResNet代码复现(PyTorch),每一行都有超详细注释,新手小白都能看懂,亲测可运行
人工智能深度学习100种网络模型,精心整理,全网最全,PyTorch框架逐一搭建
大家好,我是微学AI,今天给大家介绍一下人工智能深度学习100种网络模型,这些模型可以用PyTorch深度学习框架搭建。模型按照个人学习顺序进行排序
ResNeXt代码复现+超详细注释(PyTorch)
ResNeXt代码复现(PyTorch),每一行都有超详细注释,新手小白都能看懂,亲测可运行
【Yolov5】涨点亲测有效,Yolov5添加PSA极化自注意力机制
Yolov5添加PSA极化注意力机制,助力实验涨点!主要用于目标检测、图像语义分割、人体姿态识别等
使用pytorch的错误整理
程序卡在Using /home/liao/.cache/torch_extensions/py38_cu102 as PyTorch extensions root…在/home/liao/.cache下删除torch_extensions文件夹,原因:之前运行pytorch时,不正常退出,导致的进
2023年最新CUDA安装教程,看完就会(windows版)。
本文概述:正确安装CUDA是用显卡加速深度学习的关键,网上的CUDA教程都不够详细,小白容易装不明白,因此作者打算写一份细致的CUDA安装教程,争取把饭喂到你胃里。
AttributeError: module ‘torch‘ has no attribute ‘concat‘
在跑算法代码的时候,发现报错,但是这个错误在网上没有找到,我推测是pytorch改版问题,于是查看torch版本改动,发现torch.concat改版后该写为torch.cat。不过或许我写的也不够准确,除此之外还看到了有人问torch.concat和torch.cat的区别。不过出现了这类问题改成



