
众所周知,python训练pytorch模型得到.pt模型。但在实际项目应用中,特别是嵌入式端部署时,受限于语言、硬件算力等因素,往往需要优化部署,而tensorRT是最常用的一种方式。本文以yolov5的部署为例,说明模型部署在x86架构上的电脑端的流程。(部署在Arm架构的嵌入式端的流程类似)。
一、环境安装
1. 安装tensorRT
根据自己的系统Ubuntu版本、CPU架构、CUDA版本来选择tensorrt的下载包,连接如下
https://developer.nvidia.com/nvidia-tensorrt-8x-download
注意如果是自己的cuda不是用.deb安装的,最好是下载tensorrt的.tar包进行安装。笔者因为事先配置过pytorch开发环境,安装过cuda(.run)方式,所以使用.deb安装tensorrt时一直报错且未解决,后来使用.tar安装就好了。下载tensorrt的时候要注意版本对应关系,这里的版本对应关系包括cuda和cudnn的版本。如tensorrt使用的TensorRT-8.4.1.5.Linux.x86_64-gnu.cuda-11.6.cudnn8.4.tar.gz,则cuda要使用11.6,cudnn要使用8.4.1,否则编译tensorrt时会报错。
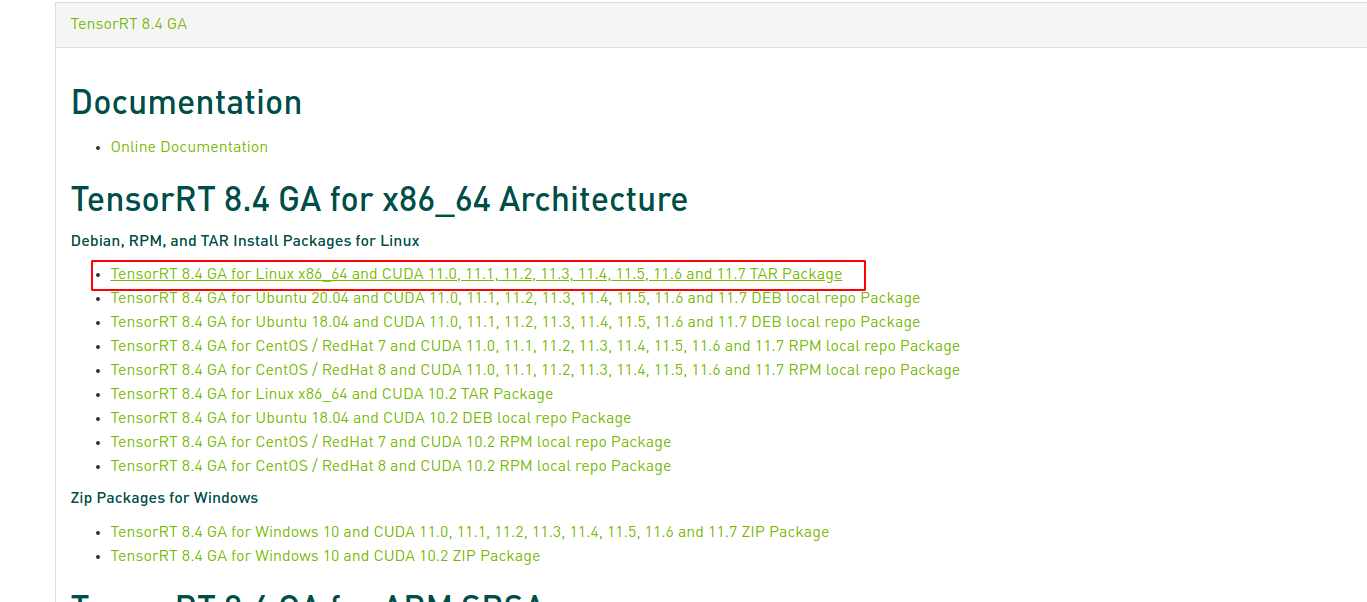
下载后文件为 TensorRT-8.4.1.5.Linux.x86_64-gnu.cuda-11.6.cudnn8.4.tar.gz
执行下列命令
# 解压
tar zxf TensorRT-8.4.1.5.Linux.x86_64-gnu.cuda-11.6.cudnn8.4.tar.gz
# 换个目录
cp TensorRT-8.4.1.5 /opt
编辑.bashrc文件把tensorrt的库文件添加到环境变量
# 开大bashrc文件
sudo gedit ~./bashrc
# 在文件末尾添加下列一行
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/TensorRT-8.4.1.5/lib
保存关闭后,完成配置更新环境
source ~/.bashrc
复制tensorRT目录下 lib、include文件夹到系统文件夹(或者将这两个文件夹路径添加到.bashrc文件中)
sudo cp -r ./lib/* /usr/lib
sudo cp -r ./include/* /user/include
安装完成后,测试是否安装成功,这里使用 /opt/TensorRT-8.4.1.5/samples/sampleMNIST来测试
cd /opt/TensorRT-8.4.1.5/samples/sampleMNIST
sudo make
编译之后会在 /opt/TensorRT-8.4.1.5/bin生成对应的可执行文件,此时直接运行sample_mnist
sudo ./sample_mnist
得到下列结果即为成功
2. 安装opencv
具体参考我的另一篇博客
ubuntu编译安装opencv4.5.1(C++)_专业女神杀手的博客-CSDN博客
二、tensorrt的yolov5部署
tensorrt是一个推理引擎架构,会将pytorch用到的网络模块,如卷积,池化等用tensorrt进行重写。pytorch模型转换为.engine后就可以进行推理。
在github上下载tensorrt, 注意tensorrt版本和yolov5版本的匹配关系,如tensorrt5.0对应yolov5的 v5.0
GitHub - wang-xinyu/tensorrtx at yolov5-v5.0
基本上搭建好环境后,根据github上这个开源项目的readme文件进行tensorrt部署就可以了。
1. generate .wts from pytorch with .pt, or download .wts from model zoo
git clone -b v5.0 https://github.com/ultralytics/yolov5.git
git clone https://github.com/wang-xinyu/tensorrtx.git
// download https://github.com/ultralytics/yolov5/releases/download/v5.0/yolov5s.pt
cp {tensorrtx}/yolov5/gen_wts.py {ultralytics}/yolov5
cd {ultralytics}/yolov5
python gen_wts.py -w yolov5s.pt -o yolov5s.wts
// a file 'yolov5s.wts' will be generated.
2. build tensorrtx/yolov5 and run
cd {tensorrtx}/yolov5/
// update CLASS_NUM in yololayer.h if your model is trained on custom dataset
mkdir build
cd build
cp {ultralytics}/yolov5/yolov5s.wts {tensorrtx}/yolov5/build
cmake ..
make
sudo ./yolov5 -s [.wts] [.engine] [s/m/l/x/s6/m6/l6/x6 or c/c6 gd gw] // serialize model to plan file
sudo ./yolov5 -d [.engine] [image folder] // deserialize and run inference, the images in [image folder] will be processed.
// For example yolov5s
sudo ./yolov5 -s yolov5s.wts yolov5s.engine s
sudo ./yolov5 -d yolov5s.engine ../samples
// For example Custom model with depth_multiple=0.17, width_multiple=0.25 in yolov5.yaml
sudo ./yolov5 -s yolov5_custom.wts yolov5.engine c 0.17 0.25
sudo ./yolov5 -d yolov5.engine ../samples
注意:我的环境是
- ubuntu20.04
- cuda11.6
- cudnn8.4.1
- TensorRT-8.4.1.5.Linux.x86_64-gnu.cuda-11.6.cudnn8.4
- wang-xinyu/tensorrtx/tree/yolov5-v5.0
- ultralytics/yolov5/tree/v5.0
上述环境是可以正常运行的。但我使用wang-xinyu/tensorrt/tree/yolov5-v3.0和ultralytics/yolov5/tree/v3.0时,make总出错,这是因为tensorrt的版本造成的。总之,这套流程的版本匹配还挺不容易的,坑比较多。
三、封装tensorrt(yolov5)算法接口供其他项目调用
在实际项目使用中,yolov5往往作为一个算法调用接口使用,这里通过改写一下tensorrt的yolov5代码,实现一个例子,可以在其他项目C++项目中调用yolv5。
本例子把源码yolov5.cpp拆成yolo_infer.hpp和yolo_infer.cpp,修改下CMakelists然后写一个main函数调用。(文件夹yolov5里的其他文件都不用变)
yolo_infer.hpp
#ifndef _YOLO_INFER_H
#define _YOLO_INFER_H
#include<opencv2/opencv.hpp>
static int get_width(int x, float gw, int divisor = 8);
static int get_depth(int x, float gd);
//void doInference(IExecutionContext& context, cudaStream_t& stream, void **buffers, float* input, float* output, int batchSize);
// load engine model(buffers and stream)
void yolov5_init(std::string engine_file);
// release engine model
void yolov5_destroy();
// recognize
cv::Mat yolov5_recognize(cv::Mat& frame);
#endif
yolo_infer.cpp
#include <iostream>
#include <chrono>
#include <cmath>
#include "cuda_utils.h"
#include "logging.h"
#include "common.hpp"
#include "utils.h"
#include "calibrator.h"
#define USE_FP16 // set USE_INT8 or USE_FP16 or USE_FP32
#define DEVICE 0 // GPU id
#define NMS_THRESH 0.4
#define CONF_THRESH 0.5
#define BATCH_SIZE 1
// stuff we know about the network and the input/output blobs
static const int INPUT_H = Yolo::INPUT_H;
static const int INPUT_W = Yolo::INPUT_W;
static const int CLASS_NUM = Yolo::CLASS_NUM;
static const int OUTPUT_SIZE = Yolo::MAX_OUTPUT_BBOX_COUNT * sizeof(Yolo::Detection) / sizeof(float) + 1; // we assume the yololayer outputs no more than MAX_OUTPUT_BBOX_COUNT boxes that conf >= 0.1
const char* INPUT_BLOB_NAME = "data";
const char* OUTPUT_BLOB_NAME = "prob";
static Logger gLogger;
char categories[] = {"buoy"};
void* buffers[2];
cudaStream_t stream;
int inputIndex;
int outputIndex;
IExecutionContext* context;
ICudaEngine* engine;
IRuntime* runtime;
static int get_width(int x, float gw, int divisor = 8) {
return int(ceil((x * gw) / divisor)) * divisor;
}
static int get_depth(int x, float gd) {
if (x == 1) return 1;
int r = round(x * gd);
if (x * gd - int(x * gd) == 0.5 && (int(x * gd) % 2) == 0) {
--r;
}
return std::max<int>(r, 1);
}
void doInference(IExecutionContext& context, cudaStream_t& stream, void **buffers, float* input, float* output, int batchSize) {
// DMA input batch data to device, infer on the batch asynchronously, and DMA output back to host
CUDA_CHECK(cudaMemcpyAsync(buffers[0], input, batchSize * 3 * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyHostToDevice, stream));
context.enqueue(batchSize, buffers, stream, nullptr);
CUDA_CHECK(cudaMemcpyAsync(output, buffers[1], batchSize * OUTPUT_SIZE * sizeof(float), cudaMemcpyDeviceToHost, stream));
cudaStreamSynchronize(stream);
}
// load engine model(buffers and stream)
void yolov5_init(std::string engine_file)
{
cudaSetDevice(DEVICE);
std::string engine_name = engine_file;
// deserialize the .engine and run inference
std::ifstream file(engine_name, std::ios::binary);
if (!file.good()) {
std::cerr << "read " << engine_name << " error!" << std::endl;
return;
}
char *trtModelStream = nullptr;
size_t size = 0;
file.seekg(0, file.end);
size = file.tellg();
file.seekg(0, file.beg);
trtModelStream = new char[size];
assert(trtModelStream);
file.read(trtModelStream, size);
file.close();
runtime = createInferRuntime(gLogger);
assert(runtime != nullptr);
engine = runtime->deserializeCudaEngine(trtModelStream, size);
assert(engine != nullptr);
context = engine->createExecutionContext();
assert(context != nullptr);
delete[] trtModelStream;
assert(engine->getNbBindings() == 2);
// In order to bind the buffers, we need to know the names of the input and output tensors.
// Note that indices are guaranteed to be less than IEngine::getNbBindings()
inputIndex = engine->getBindingIndex(INPUT_BLOB_NAME);
outputIndex = engine->getBindingIndex(OUTPUT_BLOB_NAME);
assert(inputIndex == 0);
assert(outputIndex == 1);
// Create GPU buffers on device
CUDA_CHECK(cudaMalloc(&buffers[inputIndex], BATCH_SIZE * 3 * INPUT_H * INPUT_W * sizeof(float)));
CUDA_CHECK(cudaMalloc(&buffers[outputIndex], BATCH_SIZE * OUTPUT_SIZE * sizeof(float)));
// Create stream
CUDA_CHECK(cudaStreamCreate(&stream));
}
void yolov5_destroy()
{
// Release stream and buffers
cudaStreamDestroy(stream);
CUDA_CHECK(cudaFree(buffers[inputIndex]));
CUDA_CHECK(cudaFree(buffers[outputIndex]));
// Destroy the engine
context->destroy();
engine->destroy();
runtime->destroy();
}
cv::Mat yolov5_recognize(cv::Mat& frame)
{
// prepare input data ---------------------------
static float data[BATCH_SIZE * 3 * INPUT_H * INPUT_W];
//for (int i = 0; i < 3 * INPUT_H * INPUT_W; i++)
// data[i] = 1.0;
static float prob[BATCH_SIZE * OUTPUT_SIZE];
int fcount = 1;
int b = 0;
//if (frame.empty()) return;
cv::Mat pr_img = preprocess_img(frame, INPUT_W, INPUT_H); // letterbox BGR to RGB
int i = 0;
for (int row = 0; row < INPUT_H; ++row) {
uchar* uc_pixel = pr_img.data + row * pr_img.step;
for (int col = 0; col < INPUT_W; ++col) {
data[b * 3 * INPUT_H * INPUT_W + i] = (float)uc_pixel[2] / 255.0;
data[b * 3 * INPUT_H * INPUT_W + i + INPUT_H * INPUT_W] = (float)uc_pixel[1] / 255.0;
data[b * 3 * INPUT_H * INPUT_W + i + 2 * INPUT_H * INPUT_W] = (float)uc_pixel[0] / 255.0;
uc_pixel += 3;
++i;
}
}
// Run inference
auto start = std::chrono::system_clock::now();
doInference(*context, stream, buffers, data, prob, BATCH_SIZE);
auto end = std::chrono::system_clock::now();
std::cout << std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count() << "ms" << std::endl;
std::vector<std::vector<Yolo::Detection>> batch_res(fcount);
auto& res = batch_res[b];
nms(res, &prob[b * OUTPUT_SIZE], CONF_THRESH, NMS_THRESH);
std::cout << res.size() << std::endl;
cv::Mat img = frame;
for (size_t j = 0; j < res.size(); j++) {
cv::Rect r = get_rect(img, res[j].bbox);
cv::rectangle(img, r, cv::Scalar(0x27, 0xC1, 0x36), 2);
cv::putText(img, "buoy "+std::to_string((float)res[j].conf), cv::Point(r.x, r.y - 1), cv::FONT_HERSHEY_PLAIN, 1.2, cv::Scalar(0xFF, 0xFF, 0xFF), 2);
}
//cv::imwrite("re.jpg", img);
return img;
}
main.cpp
#include <iostream>
#include<opencv2/opencv.hpp>
#include"yolo_infer.hpp"
int main(int argc, char** argv)
{
std::string img_path = std::string(argv[1]);
std::cout<<img_path<<std::endl;
cv::Mat img = cv::imread(img_path);
std::string engine_file = "buoy_1026.engine";
yolov5_init(engine_file);
cv::Mat re = yolov5_recognize(img);
cv::imwrite("re.jpg", re);
yolov5_destroy();
return 0;
}
CMakelists.txt
cmake_minimum_required(VERSION 2.6)
project(yolov5_tinktek)
add_definitions(-std=c++11)
add_definitions(-DAPI_EXPORTS)
option(CUDA_USE_STATIC_CUDA_RUNTIME OFF)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_BUILD_TYPE Debug)
find_package(CUDA REQUIRED)
if(WIN32)
enable_language(CUDA)
endif(WIN32)
message("PROJECT_SOURCE_DIR: ${PROJECT_SOURCE_DIR}")
include_directories(${PROJECT_SOURCE_DIR}/include)
# include and link dirs of cuda and tensorrt, you need adapt them if yours are different
# cuda
include_directories(/usr/local/cuda/include)
link_directories(/usr/local/cuda/lib64)
# tensorrt
include_directories(/usr/include/x86_64-linux-gnu/)
link_directories(/usr/lib/x86_64-linux-gnu/)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -Wall -Ofast -Wfatal-errors -D_MWAITXINTRIN_H_INCLUDED")
cuda_add_library(myplugins SHARED ${PROJECT_SOURCE_DIR}/yololayer.cu)
target_link_libraries(myplugins nvinfer cudart)
find_package(OpenCV)
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(yolov5 ${PROJECT_SOURCE_DIR}/calibrator.cpp ${PROJECT_SOURCE_DIR}/yolo_infer.cpp ${PROJECT_SOURCE_DIR}/main.cpp)
target_link_libraries(yolov5 nvinfer)
target_link_libraries(yolov5 cudart)
target_link_libraries(yolov5 myplugins)
target_link_libraries(yolov5 ${OpenCV_LIBS})
if(UNIX)
add_definitions(-O2 -pthread)
endif(UNIX)
使用流程如下:
- 使用pythoy训练出.pt模型
- 使用tensorrt里的文件gen_wts.py把.pt变成.wts
- 使用tensorrt里的yolv5源码把.wts转换为.engine
- 使用我修改后的例子,把yolov5源码封装成函数,供给项目调用。
踩坑不少,记录一下。。。。
版权归原作者 专业女神杀手 所有, 如有侵权,请联系我们删除。