CVPR2022论文列表(中英对照)
CVPR论文列表,中英对照
YOLO系列目标检测算法-YOLOv6
YOLO系列文章之YOLOv6。本文通过分析以往YOLO系列算法和最新技术,观察到几处需完善的地方,通过对网络设计、标签分配、损失函数、数据增强、工业便利化改进、量化和部署等进行修改,设计了EfficientRep、SCPStackRep Block、Rep-PAN、decoupled head等结
人体姿态识别
啦啦啦
残差网络(Residual Network,ResNet)原理与结构概述
残差网络(Residual Network)简介、概述与基本结构。
Pytorch DataLoader中的num_workers (选择最合适的num_workers值)
Pytorch DataLoader中的num_workers (选择最合适的num_workers值)
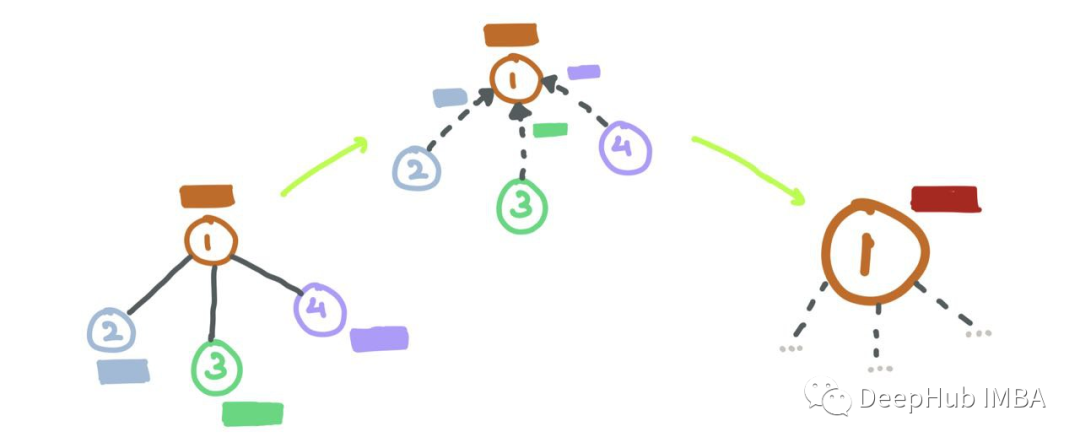
图神经网络的数学原理总结
图深度学习(Graph Deep Learning) 多年来一直在加速发展。本文将流行的图神经网络及其数学细微差别的进行详细的梳理和解释
Github复现-测试基于transformer的变化检测模型BIT_CD
基于Transformer 的变化检测模型测试
凯斯西储大学轴承数据介绍及处理
凯斯西储大学轴承数据介绍及处理
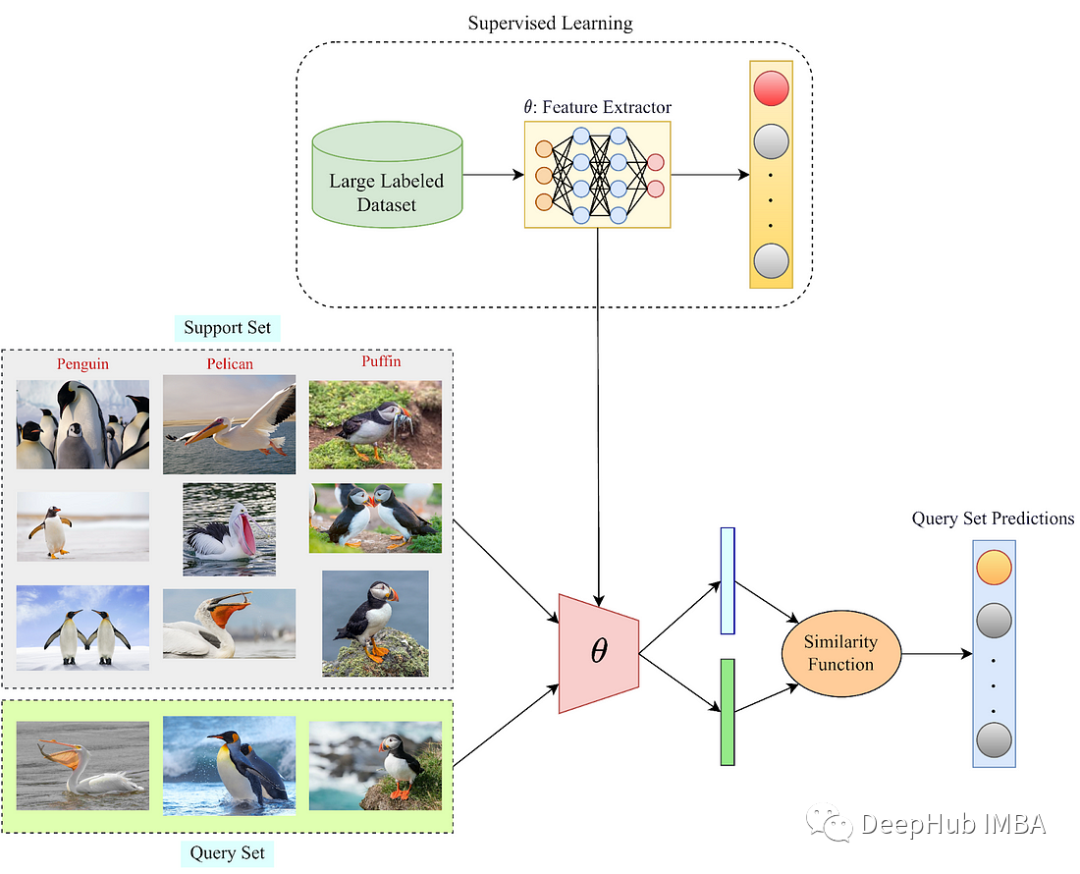
少样本学习综述:技术、算法和模型
少样本学习(FSL)是机器学习的一个子领域,它解决了只用少量标记示例学习新任务的问题。
Ubuntu18.04安装Nvidia驱动【全网不坑,超全步骤】(亲测~)
Ubuntu18.04安装Nvidia驱动【全网不坑,超全步骤】亲测~为了方便以后回忆以及给像我一样的菜鸡提供思路,给出具体的步骤:No.1 查看自己的电脑显卡型号(已知麻烦自动略过)No.2 下载电脑对应的Nvidia版本驱动No.3 准备工作,下载依赖No.4 开始安装为了方便以后回忆以及
YOLOV5训练自己的数据集(超详细,小白必看)
教你最方便的了解如何使用yolov5训练自己的数据集(最全面,最简单易懂)
【Yolov5】Yolov5添加ASFF, 网络改进优化
Yolov5添加ASFF模块,有完整的使用说明,实验可行,可以提高模型性能
unet模型及代码解析
什么是unet一个U型网络结构,2015年在图像分割领域大放异彩,unet被大量应用在分割领域。它是在FCN的基础上构建,它的U型结构解决了FCN无法上下文的信息和位置信息的弊端(下文细说)Unet网络结构主干结构解析左边为特征提取网络,右边为特征融合网络特征提取网络由两个3x3的卷积层(RELU)
YOLOV8-gradcam 热力图可视化 即插即用 不需要对源码做任何修改!
yolov8-gradcam热力图可视化,即插即用,不需要对源码做任何修改。代码仓库还有yolov5和yolov7的热力图可视化代码,也是不需要对源码做任何修改喔!
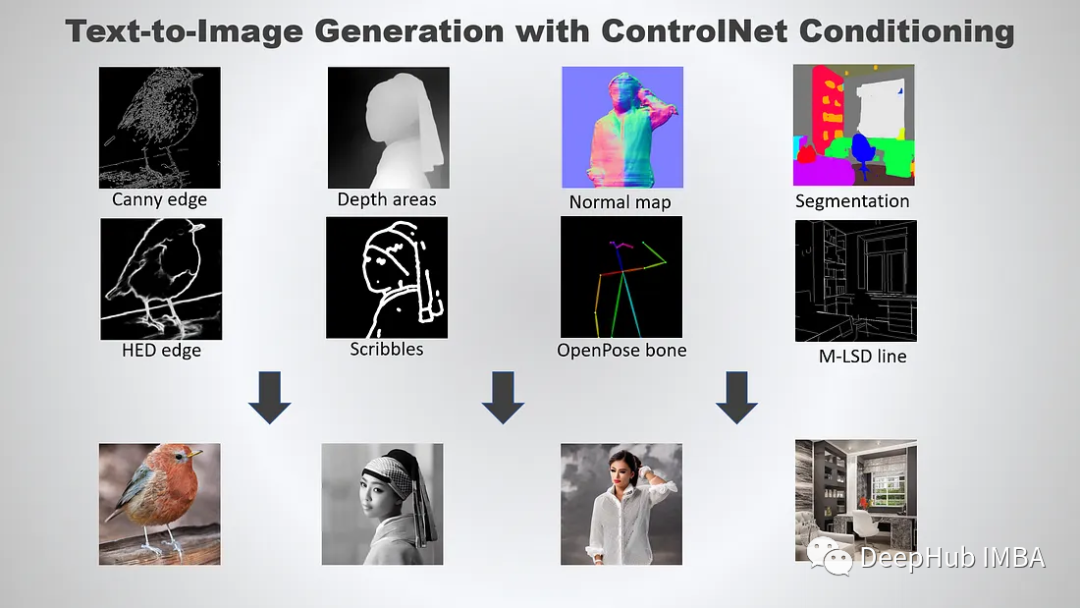
使用ControlNet 控制 Stable Diffusion
本文将要介绍整合HuggingFace的diffusers 包和ControlNet调节生成文本到图像,可以更好地控制文本到图像的生成
SwinIR实战:详细记录SwinIR的训练过程
SwinIR实战:详细记录SwinIR的训练过程。论文地址:https://arxiv.org/pdf/2108.10257.pdf预训练模型下载:https://github.com/JingyunLiang/SwinIR/releases训练代码下载:https://github.com/csz
pytorch模型保存与加载总结
pytorch模型保存与加载方式、打包保存tar、多卡训练遇到的问题、torch.jit、加载预训练模型、保存模型再加载精度损失
LSTM实现时间序列预测(PyTorch版)
为了训练数据,首先定义LSTM模型,然后再定义对应的损失函数,由于我们这里是风速预测,显然是个回归问题,所以采用回归问题常用的MESLoss(),如果可以的话,可以自定义损失函数,针对自己的项目需求定义对应的损失函数。对于优化器来讲,使用的也是目前常用的Adam优化器,对于新手来讲也可以多多尝试其它
GhostNet v2(NeurIPS 2022 Spotlight)原理与代码解析
首先回顾下GhostNet,对于输入 \(X\in \mathbb{R}^{H\times W\times C}\),Ghost module将一个标准的卷积替换成两步。首先用一个1x1卷积生成intrinsic feature。
史上最全学习率调整策略lr_scheduler
学习率是深度学习训练中至关重要的参数,很多时候一个合适的学习率才能发挥出模型的较大潜力。所以学习率调整策略同样至关重要,这篇博客介绍一下Pytorch中常见的学习率调整方法。



