目标检测(Object Detection)学习笔记(概述与传统算法与基于深度学习算法)
目标检测(Object Detection)的任务是找出图像中所有感兴趣的目标(物体),不同于分类和回归问题,目标检测还需要确定目标在图像中的位置(定位),而确定识别目标的类别和位置(分类和定位),是计算机视觉领域的核心问题之一。
BERTopic:NLP主题模型的未来!
文| ZenMoore编| 小轶以前我一直以为,主题建模(提取文档的主题词)这种机器学习时代就开始研究的基础工具,现在肯定已经到头了,虽然...有时效果可能不是那么让人满意。但突然看到一则推文:“彻底疯了!不需要预先清洗数据,就能够快速拿到质量难以置信的主题!” “NLP 主题模型的未来!”好家伙!
D435i相机的标定及VINS-Fusion config文件修改
D435i相机的标定及VINS-Fusion config文件修改
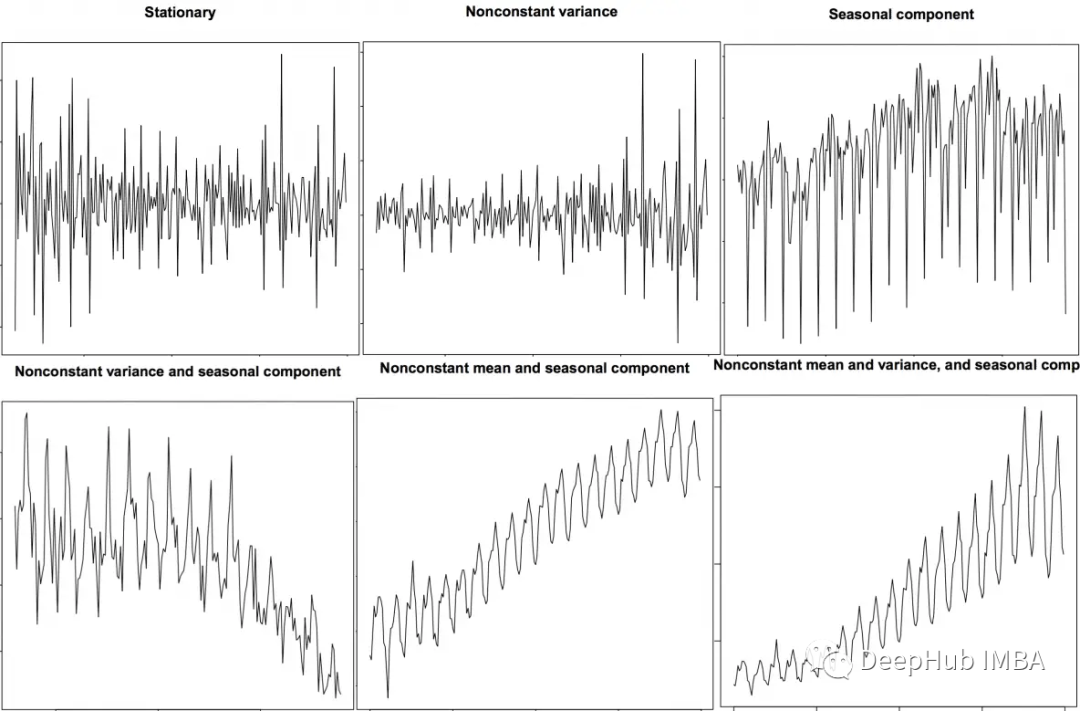
时间序列特征提取的Python和Pandas代码示例
使用Pandas和Python从时间序列数据中提取有意义的特征,包括移动平均,自相关和傅里叶变换。
到底什么是模型预测控制MPC(一)
1. 为什么使用MPC控制2. 什么是模型预测控制 MPC3. MPC的参数设计在我们驾驶汽车的时候,驾驶的目的就是让汽车行驶在安全的道路上。作为一个驾驶员我们可以控制的是汽车的油门和方向盘,也就是对应控制的是汽车的速度和方向。在驾驶的过程中我们会不断的调节方向盘的角度,这是因为我们知道当前角度如果
简单研究一下 OpenAI 的官方文档
介绍 openai 的tokenizer、模型、ChatGPT接口使用(gpt-3.5-turbo)、使用限制、定价。
ChatGLM-6B (介绍以及本地部署)
ChatGLM-6B 是一个开源的、支持中英双语问答的对话语言模型,基于架构,具有 62 亿参数。结合模型量化技术,用户可以在消费级的显卡上进行本地部署(INT4 量化级别下最低只需 6GB 显存)。ChatGLM-6B 使用了和ChatGLM相同的技术,针对中文问答和对话进行了优化。经过约 1T
[九]深度学习Pytorch-transforms图像增强(剪裁、翻转、旋转)
深度学习Pytorch-transforms图像增强(剪裁、翻转、旋转)
几种python存储数据(海量数据)的方式及读取时间对比
使用背景:需要保存通过包括但不限于torch及numpy创建的数据(在这里主要测试的是通过网络训练,提取到的图片的特征向量)数据格式及大小:在这里使用torch创建数据,没用使用GPU(已经是该配置下能运行的最大数据量了,否则会爆内存)运行环境:具体参数参考R9000P 2021 3070版本;数据
简单易上手YOLOV5-deepsort(Windows)
YOLOV5模型训练以及deep sort目标追踪的简单上手操作,不同内容均有提示,并总结了一些运行过程中可能会出现的问题。
ChatGPT开源平替——OpenChatKit(前OpenAI团队打造)
OpenChatKit是一个由前OpenAI研究员共同打造的开源聊天机器人平台。它包含了训练好的大型语言模型、定制配方和可扩展的检索系统,可以帮助用户快速构建高精度、多功能的聊天机器人应用。其中,最核心的组件是一个经过微调的、具有200亿参数的语言模型——GPT-NeoXT-Chat-Base-20
本手、妙手、俗手?我用AI写2022高考全国作文题,会被看出来?
自然语言处理是人工智能领域的前沿学科和热点方向,本文试着用NLP文章生成模型写了2022年高考作文题,有点意思
Lift-Splat-Shoot算法理解及代码中文注释
对算法Lift-Splat-Shoot的理解以及源代码中文注释
ICRA2022 SLAM进展---激光SLAM
ICRA2022 slam论文简单导读,未完待续
【深度学习】扩散模型(Diffusion Model)详解
【深度学习】扩散模型(Diffusion Model)详解
A2C算法原理及代码实现
A2C算法原理及代码实现
FAST_LIO_SAM 融入后端优化的FASTLIO SLAM 系统 前端:FAST_LIO2 后端:LIO_SAM
FAST_LIO_SAM 融入后端优化的FASTLIO SLAM 系统 前端:FAST_LIO2 后端:LIO_SAM
机器学习和深度学习概述
学习笔记
Ubuntu20.04LTS下安装Intel Realsense D435i驱动与ROS包
这里写自定义目录标题目标一、D435i简介二、环境配置三、RealSense的SDK2.0安装四、ROS包安装目标在Ubuntu20.04LTS系统下安装D435i的驱动SDK2和ROS包,实现在ROS环境中使用D435i。一、D435i简介D435i是Inter公司RealSense系列摄像头的一
快速了解 GPT 发展三阶段
GPT-1 的预训练模型在 GPT-2 团队看来有一个不足的地方,虽然 GPT-1 构建了一个不错的预训练模型,但是对下游任务还是需要使用有标注的样板来训练新的模型,也就是说需要对具体的下游任务做有监督的微调。同时,GPT-2 还引入了一些新的技术,如动态掩码、自适应的词向量权重、多层次的表示等,以



