【一文足以系列】ORB SLAM2完整详细算法流程
逻辑详细且严密的讲述了ORBSLAM2的算法流程
超越ShuffleNet、MobileNet、MobileViT等模型的新backbone FasterNet
为了设计快速神经网络,许多工作都集中在减少浮点运算(FLOPs)的数量上。然而,作者观察到FLOPs的这种减少不一定会带来延迟的类似程度的减少。这主要源于每秒低浮点运算(FLOPS)效率低下。为了实现更快的网络,作者重新回顾了FLOPs的运算符,并证明了如此低的FLOPS主要是由于运算符的频繁内存访
语义分割数据集:Cityscapes的使用
本文主要介绍Cityscapes在语义分割方向上的理解和使用。其中包括Cityscapes具体构建流程和使用方法。并提供了具体代码和pytorch dataset代码。
树莓派+MediaPipe+PCA9685+自制摄像机云台实现人脸跟踪移动
利用几十块钱的机械臂自制了一个摄像头云台,使用了两个MG90S舵机和一块PCA9685驱动的16路舵机扩展板,再通过谷歌的MediaPipe库实现摄像机跟随人脸移动的功能
【论文笔记】—低光图像增强—Supervised—URetinex-Net—2022-CVPR
【题目】:URetinex-Net: Retinex-based Deep Unfolding Network for Low-light Image Enhancement 提出了一种基于Retinex的 deep unfolding network (URetinex-Net),它将一个优化问题
安装ORB-SLAM3教程
ORB-SLAM3
Disco Diffusion 快速入门
Disco Diffusion(DD)是一个CLIP指导的AI图像生成技术,简单来说,Diffusion是一个对图像不断去噪的过程,而CLIP模型负责对图像的文本描。
【OpenCv • c++】 大津法(OTSU)阈值处理
在图像处理中,对于同样的操作,处理灰度图像的计算量要远远小于处理彩色图像,而二值图像(只含灰度值0或1)的计算量比前两者更小。因此,二值化操作在图像处理中有着很大的作用。二值化图像的实现方法有很多。用的最多的方法是利用图像像素点分布规律,设置阈值进行像素点分割,从而得到二值化图像。
torch.load() 、torch.load_state_dict() 详解
torch.load() 、torch.load_state_dict() 详解
基于Python手动实现Harris角点检测
基于Python手动实现Harris角点检测算法
OpenCV函数大全(超级详细版)-python操作
OpenCV函数大全(超级详细版)方便大家学习。
Opencv实战——图像拼接
图像拼接(Image Stitching)是一种利用实景图像组成全景空间的技术,它将多幅图像拼接成一幅大尺度图像或360度全景图,接可以看做是场景重建的一种特殊情况,其中图像仅通过平面单应性进行关联。图像拼接在运动检测和跟踪,增强现实,分辨率增强,视频压缩和图像稳定等机器视觉领域有很大的应用。
深度学习参数初始化(一)Xavier初始化 含代码
Xavier初始化也称为Glorot初始化,因为发明人为Xavier Glorot。Xavier initialization是 Glorot 等人为了解决随机初始化的问题提出来的另一种初始化方法,他们的思想就是尽可能的让输入和输出服从相同的分布,这样就能够避免后面层的激活函数的输出值趋向于0。..
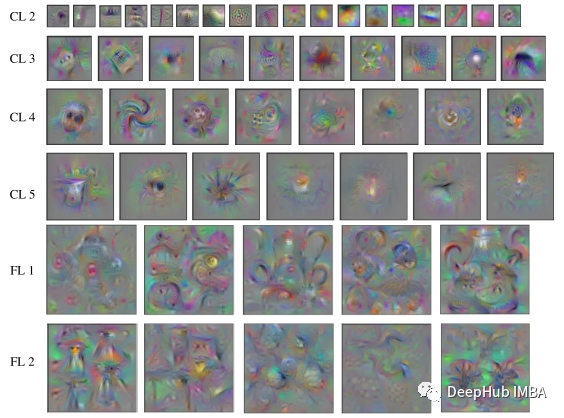
可视化CNN和特征图
卷积神经网络(cnn)是一种神经网络,通常用于图像分类、目标检测和其他计算机视觉任务。CNN的关键组件之一是特征图,它是通过对图像应用卷积滤波器生成的输入图像的表示。
图像修复(Image Restoration)算法数据集详细介绍
图像修复(Image Restoration)算法数据集详细介绍:人脸数据集【1.Helen Face 2.CelebA (Celebrity Attribute) 3.CelebA-HQ 4.FFHQ(Flickr-Faces-HQ)】场景数据集【1.MS COCO (Common Obje
Stable Diffusion安装教程、model导入教程以及精品promt指令
Stable Diffusion安装教程、model导入教程以及精品promt指令
YOLO系列模型改进指南
YOLO主流模型改进大杂烩!!!目前包含yolov5,yolov7,yolov8模型的众多改进方案,效果因数据集和参数而定,仅供参考。
【视觉SLAM14讲】【汇总】
第一讲东西少,就没记录【slam十四讲第二版】【课本例题代码向】【第二讲初识SLAM】【SLAM基础知识】【linux下C++编译】【cmake基础使用】【slam十四讲第二版】【课本例题代码向】【第三~四讲刚体运动、李群和李代数】【eigen3.3.4和pangolin安装,Sophus及fim的
3D深度相机---结构光
去年的仪器仪表的课有汇报,我还专门为3D深度像机做了个调研,一直用inter realsense的,最近老师让看结构光方案的,正好总结一下。由于基于双目立体视觉的深度相机对环境光照强度比较敏感,且比较依赖图像本身的特征,因此在光照不足、缺乏纹理等情况下很难提取到有效鲁棒的特征,从而导致匹配误差增大甚
OpenCV实战(17)——FAST特征点检测
Harris 算子根据两个垂直方向上的强度变化率给出了角点(或更一般地说,兴趣点)的数学定义。但使用这种定义需要计算图像导数,计算代价较为高昂,特别是兴趣点检测通常只是更复杂算法的先决步骤。在本中,我们将学习另一个特征点检测算子 FAST (Features from Accelerated Seg



