机器人逆运动学进阶:李代数、矩阵指数与旋转流形计算
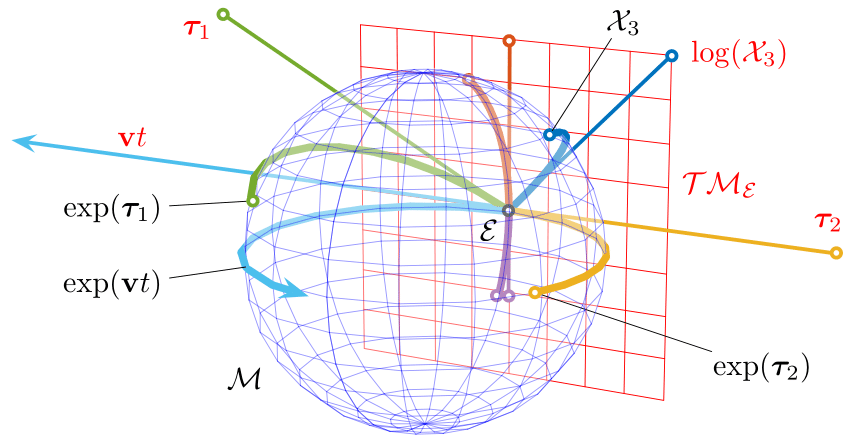
本文从理论到实践全面介绍了矩阵指数在机器人逆运动学中的应用。我们从SO(3)李群和𝖘𝖔(3)李代数的数学结构出发,解释了为什么旋转计算需要特殊的数学工具。
渗透测试AI:深入探讨人工智能系统的安全
随着人工智能(AI)技术的飞速发展,AI系统在各个领域的应用越来越广泛,从自动驾驶汽车到智能家居,再到复杂的企业决策支持系统。然而,随着这些系统的普及,它们面临的安全威胁也在不断增加。本文将深入探讨AI系统的渗透测试,分享如何评估和增强AI系统的安全性。
机器人控制系统系列:KUKA KR AGILUS_(8).安全控制系统设计
安全硬件:包括安全继电器、急停按钮、光幕等。安全软件:包括安全监控软件、安全逻辑编程等。安全协议:如IEC 61508和ISO 13849-1等标准。安全功能:如安全停止、安全区域限制、安全速度限制等。通过上述内容,我们详细介绍了KUKA KR AGILUS 机器人的安全控制系统设计原理和具体实现方
从零开始的家庭安全系统优化:用科技保障家庭平安
设 分别表示设备数据、环境因素和用户行为。例如, 表示某一时间段的门锁状态, 表示家庭成员的进出行为。分类模型:用于预测潜在的安全威胁。数据预处理:填补缺失值,确保数据完整性。梯度提升模型:用于家庭安全系统优化的分类模型。数据可视化工具:包括 Python 的 Matplotlib 和 Seabor
重讲Diffusion Policy(从公式和代码角度): 个人最看好的机器人操控算法
之前发布过一篇讲解Diffusion Policy 的blog文章,近期看到越来越多基于这个工作的衍生论文都表现出不错的效果(当然都还不稳定),不过做一些固定的任务可以实现目前为止所有方法中相对比较好的泛化性能。所以今天再对照代码介绍下关键的实现环节,没有特别复杂的数学且论文给出了基于colab的2
2024.10|AI/大模型在机器人/自动驾驶/智能驾舱领域的最新应用和深度洞察
多模态大语言模型(LLM)正逐步被应用于机器人控制和操作任务中。例如,是一种结合多模态输入的大语言模型,能够实现复杂的物体操作任务。这种模型通过学习视觉、语言和物理交互的结合,推动机器人在动态环境中的自主决策能力。这种技术的本质在于,通过LLM与机器人感知能力的结合,提升了机器人对复杂操作场景的理
一万字详解 “智元机器人“ 开源的高性能 AimRT 框架 (一)
可以发现,AimRT 框架的初始化流程包括配置管理器、插件管理器、执行器、日志管理器、RPC 管理器、通道管理器和模块管理器的初始化。每个组件在初始化阶段根据配置文件进行资源申请、注册和设置,从代码中也可以看出,AimRT提供的可扩展性和可定制化程度非常高,要定制化实现某个功能只要使用类似于类似的函
【AI开源项目】Botpress - 开源智能聊天机器人平台及其部署方案
Botpress是一个开源项目,致力于为开发者提供一个全面的平台,用于构建、部署和管理基于人工智能的聊天机器人和虚拟助手。
RA-L开源:Light-LOAM: 基于图匹配的轻量级激光雷达里程计和地图构建
RA-L开源:Light-LOAM: 基于图匹配的轻量级激光雷达里程计和地图构建
Webots控制器编程
本文主要内容是如何编写Webots控制器,使用语言为Python。
仅用30多行代码实现一个微信AI聊天机器人
python使用wxauto实现微信的自动化,以及langchian调用AI大模型回复消息
第六届机器人、智能控制与人工智能国际学术会议(RICAI 2024)
第六届机器人、智能控制与人工智能国际学术会议(RICAI 2024)将于2024年12月6-8日在中国南京召开。大会围绕机器人、智能控制与人工智能领域最新的研究热点、核心技术与发展态势,以及行业热点进行探讨,旨在为研究人员与学者提供一个交流和展示研究成果的高端学术交流平台,通过主题演讲、口头汇报和海
NGCBot-打造基于Hook机制的微信机器人,Windows本地部署
今天带大家在本地搭建一款微信机器人,调用的是 Windows 电脑端的微信,无需云服务器,无需部署,更安全可靠。
AI大模型与4大策略,打造智能客服机器人问题解决新高度
在数字化浪潮中,智能客服机器人正重塑企业与客户间的互动模式。然而,衡量智能客服机器人的价值并非易事。我们先看影响智能客服机器人运营成本的几个关键指标:处理率、解决率、费力度。其中费力度,则是指衡量用户解决问题所需付出的努力,而解决率指的是在自动化流程中,智能客服机器人独立完成任务的能力,可见处理率虽
ManiSkill3:用于通用具身 AI 的 GPU 并行机器人模拟和渲染
24年10月来自UCSD、CMU、HillBot、Dresden工大、清华大学和伦敦皇家学院的论文“ManiSkill3: GPU Parallelized Robotics Simulation and Rendering for Generalizable Embodied AI”。
科技感!6套人工智能AI主题PPT模板,科幻机器人未来风十足的PPT
动态元素:适当插入高质量的动画或短视频,展示AI技术的应用场景或工作原理,如机器人的动作、数据可视化过程等,增加互动性和未来感。图标与符号:使用线条清晰、设计简约的图标和符号来代表AI、机器学习、大数据等概念,确保它们与整体设计风格协调一致。简洁明了的布局:采用现代平面设计原则,如极简主义,扁平风,
防爆智能巡检机器人助力石化行业打造高效安全智能巡检系统
同时,机器人与物联网、大数据、云计算等技术的深度融合,将推动石油化工行业的智能化转型,使企业能够更加高效、安全、可持续地运营。亚太市场:亚太地区,尤其是中国、印度和东南亚国家,随着工业化进程的加速以及智能制造的普及,防爆智能巡检机器人市场需求也在迅速增长。防爆智能巡检机器人作为工业自动化的一部分,能
基于科大讯飞星火大模型Spark 4.0 Ultra的微信聊天机器人搭建教程
目前,办公场景中,员工需要与不同的人交谈,而微信作为其中的桥梁。随着如今工作越来越繁重,面对不同的人进行交谈已经是应接不暇,急需一个AI聊天机器人来帮助人们从繁忙的聊天中解放出来。
树莓派 AI 摄像头(Raspberry Pi AI Camera)教程
如下图所示,Raspberry Pi AI 摄像头的工作原理与传统的基于人工智能的摄像头图像处理系统不同:左侧展示了传统人工智能摄像头系统的架构。在这种系统中,摄像头向树莓派(Raspberry Pi)发送图像。Raspberry Pi 处理图像,然后执行人工智能推理。传统系统可能使用外部人工智能加
ROS2的复杂环境下的模拟仿真-基于webots
ROS2(Robot Operating System 2)是ROS的继任者,旨在解决ROS1在实时性、安全性和可扩展性方面的不足。ROS2支持跨平台(包括Linux、Windows和macOS),并采用了DDS(Data Distribution Service)作为其通信中介,提升了系统的可靠性



