小白也能读懂的ConvLSTM!(开源pytorch代码)
别再用CNN-LSTM了!ConvLSTM(卷积长短期记忆网络)是一种结合了卷积神经网络(CNN)和长短期记忆网络(LSTM)优势的深度学习模型。它主要用于处理时空数据,特别适用于需要考虑空间特征和时间依赖关系的任务,如气象预测、视频分析、交通流量预测等。
Ultralytics YOLO - 最先进的视觉人工智能:yolov8 环境搭建
Ultralytics YOLOv8是一种尖端的,最先进的(SOTA)模型,建立在以前的YOLO版本的成功基础上,并引入了新的功能和改进,以进一步提高性能和灵活性。YOLOv8旨在快速,准确,易于使用,使其成为广泛的目标检测和跟踪,实例分割,图像分类和姿态估计任务的绝佳选择。
用PyTorch 从零开始构建 BitNet 1.58bit
我们手动实现BitNet的编写,并进行的一系列小实验证实,看看1.58bit 模型是否与全精度的大型语言模型相媲美!
简单记录一下如何在pycharm中创建pytorch工程(2024)
4.控制台出现True说明已经配置成功,可以创建新的python文件进行你的project。5.在python文件中的情况如下图。2.输入import torch。1.按左侧按钮,打开控制台。
【PyTorch】多对象分割项目
对象分割任务的目标是找到图像中目标对象的边界。实际应用例如自动驾驶汽车和医学成像分析。这里将使用PyTorch开发一个深度学习模型来完成多对象分割任务。多对象分割的主要目标是自动勾勒出图像中多个目标对象的边界。对象的边界通常由与图像大小相同的分割掩码定义,在分割掩码中属于目标对象的所有像素基于预定义
Pyinstaller打包OSError: could not get source code【终极解决】
pyinstaller 打包报错 torch.jit.script
vscode中配置jupyter(vscode+anaconda+jupyter)
1.安装anaconda31.1卸载pyhon环境(没有安装过python可跳过该步骤)1.2安装anaconda之后,需要在path里添加如下路径:1.3创建虚拟环境,激活环境jupyter notebook已经在anaconda里下好了2.安装vscode2.1vscode安装2.2安装插件2.
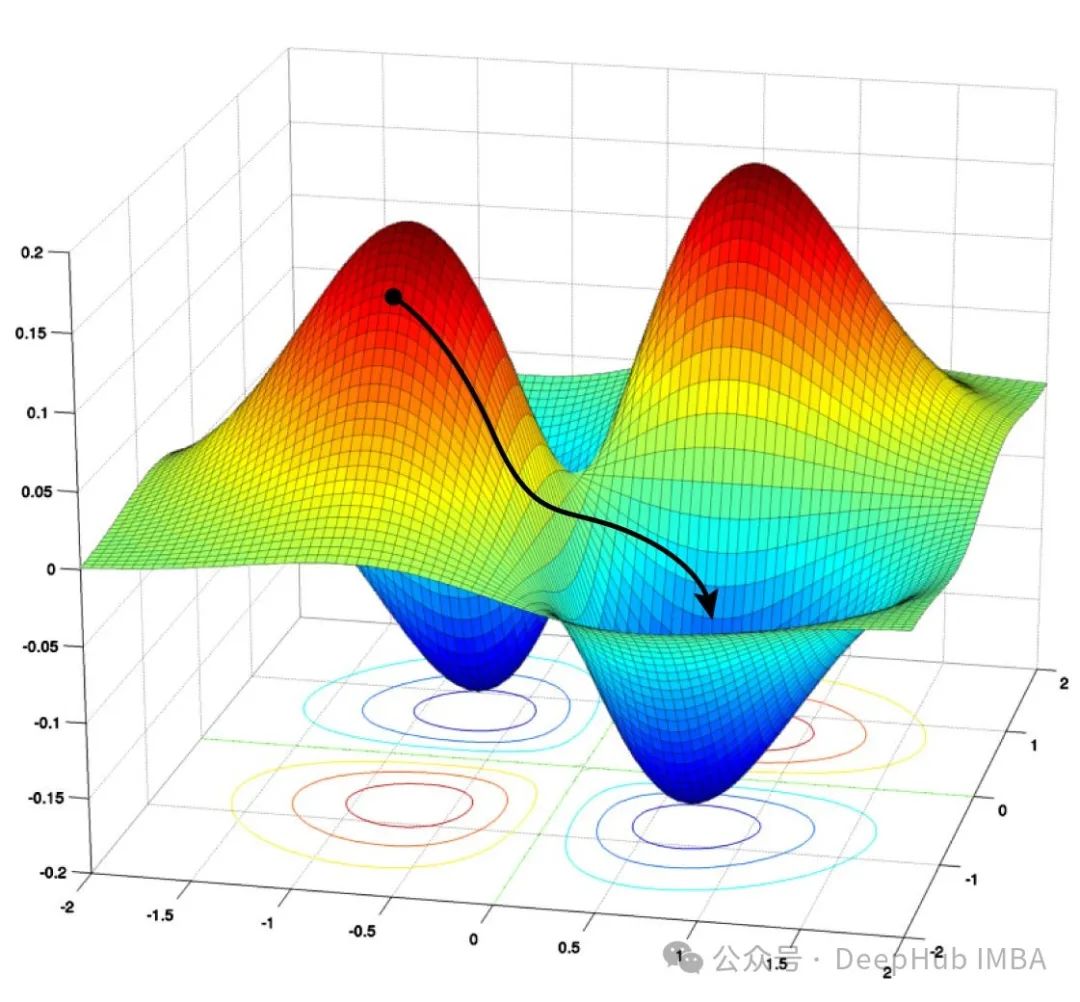
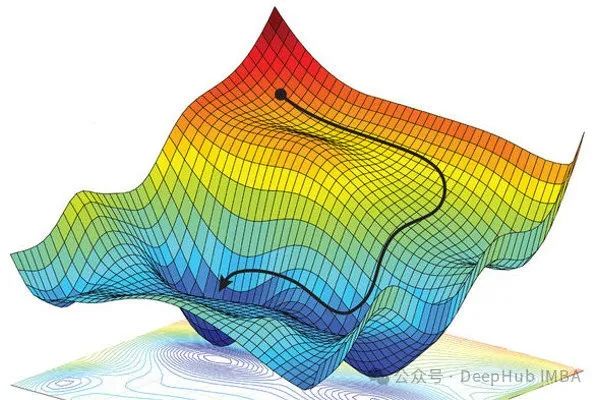
Adam-mini:内存占用减半,性能更优的深度学习优化器
论文提出一种新的优化器Adam-mini,在不牺牲性能的情况下减少Adam优化器的内存占用。
深度学习中常用损失函数介绍
选择正确的损失函数对于训练机器学习模型非常重要。不同的损失函数适用于不同类型的问题。本文将总结一些常见的损失函数,并附有易于理解的解释、用法和示例
PyTorch 2.0 GPU Nvidia运行库的安装
首先是CUDA的安装。百度搜索CUDA 11.7 download,进入官方下载页面,选择适合的操作系统安装方式(推荐使用local(本地化)安装方式),如图2-16所示。当然,读者也可以根据自己电脑的GPU配置要求,查阅PyTorch和CUDA官网,找到适合的PyTorch、CUDA、cuDNN软
“Omost:革新AI图像生成,一语成画,开启创意无界新纪元“
Omost,作为ControlNet作者倾力打造的创新项目,标志着图像生成技术的一次革命性飞跃。该项目巧妙地将大型语言模型(LLM)的强大编码能力转化为直观且高效的图像生成能力,为用户带来前所未有的创作体验。Omost项目的问世,不仅为艺术家、设计师等创意工作者提供了强大的创作工具,也为广大图像爱好
人工智能(pytorch)搭建模型25-基于pytorch搭建FPN特征金字塔网络的应用场景,模型结构介绍
大家好,我是微学AI,今天给大家介绍一下人工智能(pytorch)搭建模型25-基于pytorch搭建FPN特征金字塔网络的应用场景,模型结构介绍。特征金字塔网络(FPN)是一种深度学习模型结构,主要应用于目标检测任务中,尤其是对于多尺度目标的检测问题。该网络通过构建自底向上的高分辨率特征图与自顶向
ubuntu22.04下使用conda安装pytorch(cpu及gpu版本)
本文介绍了conda下安装cpu、gpu版本的pytorch;并介绍了如何设置镜像源。
【深度学习-番外1】Win10系统搭建VSCode+Anaconda+Pytorch+CUDA深度学习环境和框架全过程
本文将介绍在Windows 10系统下搭建深度学习环境的完整过程,包括安装Anaconda、CUDA、NVIDIA显卡驱动以及Pytorch框架。后续本专栏的Python语言下的深度学习环境都以本篇搭建的为准。
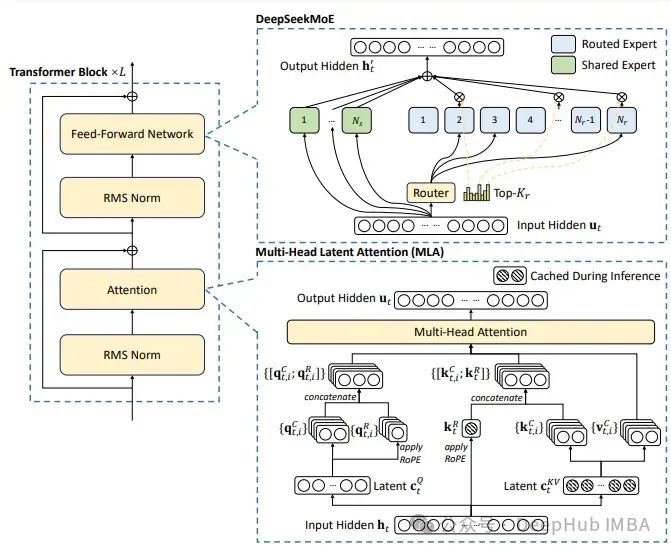
用PyTorch从零开始编写DeepSeek-V2
DeepSeek-V2是一个强大的开源混合专家(MoE)语言模型,通过创新的Transformer架构实现了经济高效的训练和推理。该模型总共拥有2360亿参数,其中每个令牌激活21亿参数,支持最大128K令牌的上下文长度。
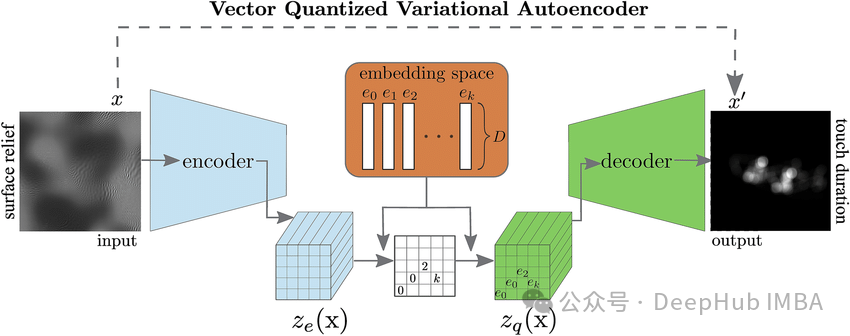
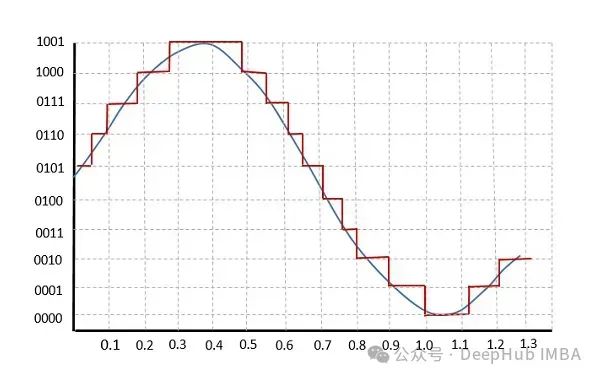
VQ-VAE:矢量量化变分自编码器,离散化特征学习模型
VQ-VAE 是变分自编码器(VAE)的一种改进。这些模型可以用来学习有效的表示。本文将深入研究 VQ-VAE 之前,不过,在这之前我们先讨论一些概率基础和 VAE 架构。
PyTorch Tabular:高效优化结构化数据处理的强大工具
PyTorch Tabular 是一个用于构建和训练深度学习模型以解决各种表格数据问题的库。
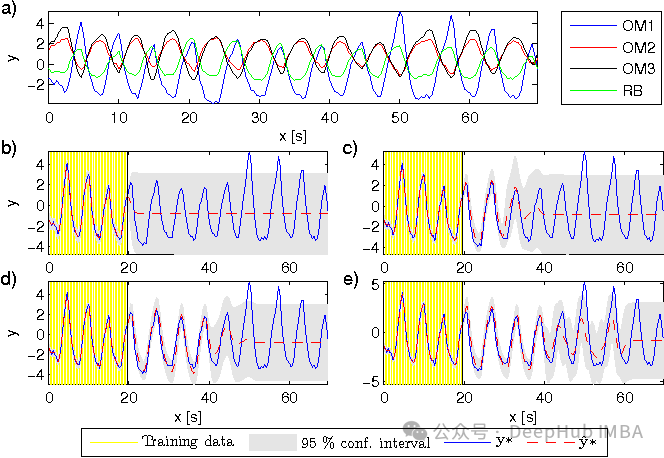
多任务高斯过程数学原理和Pytorch实现示例
本文将介绍如何通过共区域化的内在模型(ICM)和共区域化的线性模型(LMC),使用高斯过程对多个相关输出进行建模。
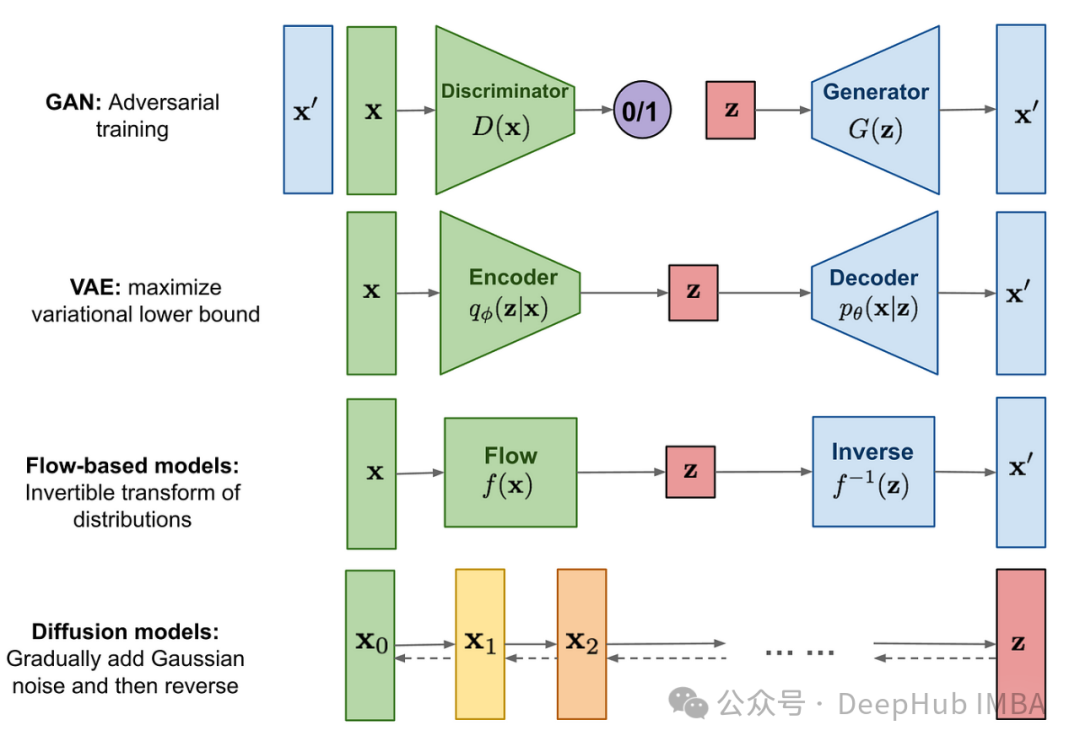
使用Pytorch中从头实现去噪扩散概率模型(DDPM)
在本文中,我们将构建基础的无条件扩散模型,即去噪扩散概率模型(DDPM)。从探究算法的直观工作原理开始,然后在PyTorch中从头构建它。本文主要关注算法背后的思想和具体实现细节。
PyTorch高级特性与性能优化
PyTorch高级特性与性能优化



