padding(卷积中的填充)
一个6x6的图像,3x3的卷积核,每一行卷积的过程类似,如图卷积核每走一步(第一个黑框到第一个绿框),输出一个像素。所以要计算卷积后图像的大小,需要知道图像大小及卷积核大小。(6-3)+1的结果为4,所以得到的卷积图像大小为4x4。公式为(图片大小 - 卷积核大小) + 1,这里的(图片大小 - 卷
YOLOv5、v7改进之二十六:改进特征融合网络PANet为ASFF自适应特征融合网络
在每个空间位置,将不同级别的特征自适应地融合在一起,例如:若某位置携带矛盾的信息,则这些特征将会被滤除,若某位置的特征带有更多的区分性线索,则这些特征将会被增强。解决问题:原YOLOv5模型特征融合网络为PANet,虽然较FPN能更好的融合不同尺度目标的特征,从而提升效果,但是还存在改进的空间,还有
《一文搞懂IoU发展历程》GIoU、DIoU、CIoU、EIoU、αIoU、SIoU
汇总IoU发展历程,建议收藏!
【swinUnet官方代码测试自己的数据集(已训练完毕)】
swinUnet官方代码测试自己的数据集
opencv训练自己的模型,实现特定物体的识别
opencv安装包中有训练好的分类器文件,可以实现人脸的识别。当然,我们也可以训练自己的分类器文件,实现对特定物体的识别。本文章就详细介绍下如何训练自己的分类器文件。
MMPose姿态估计+人体关键点识别效果演示
MMPose开源姿态估计算法库,进行了人体关键点的效果演示。(包括肢体,手部和全身的关键点,还尝试了MMPose实时效果)
NeRF 源码分析解读(一)
对 pytorch 版本的 NeRF 代码进行解析注释
注意力机制详解系列(二):通道注意力机制
本篇主要介绍注意力机制中的通道注意力机制,对通道注意力机制方法进行详细讲解,通道注意力机制在计算机视觉中,更关注特征图中channel之间的关系,重点对SENet、ECANe进行重点讲解。
fine-tuning(微调)的理解
介绍fine-tuning的过程就是用训练好的参数(从已训练好的模型中获得)初始化自己的网络,然后用自己的数据接着训练,参数的调整方法与from scratch训练过程一样(梯度下降)。对于初始化过程,我们可以称自己的网络为目标网络,训练好的模型对应网络为源网络,要求目标网络待初始化的层要与源网络的
图像中的注意力机制详解(SEBlock | ECABlock | CBAM)
图像中的注意力机制详解注意力机制目前主要有通道注意力机制和空间注意力机制两种一、 前言我们知道,输入一张图片,神经网络会提取图像特征,每一层都有不同大小的特征图。如图1所示,展示了 VGG网络在提取图像特征时特征图的大小变化。图1 VGG网络特征结构图其中,特征图常见的矩阵形状为[C,H,W]{[C
学习Transformer:自注意力与多头自注意力的原理及实现
自从Transformer[3]模型在NLP领域问世后,基于Transformer的深度学习模型性能逐渐在NLP和CV领域(Vision Transformer)取得了令人惊叹的提升。本文的主要目的是介绍经典Transformer模型和Vision Transformer的技术细节及基本原理,以方便
【CBAM 解读】混合注意力机制:Convolutional Block Attention Module
本文提出了卷积块注意模块(CBAM),这是一种简单而有效的前馈卷积神经网络注意模块。
Repvgg详解及其实现(pytorch)
原论文中的结构图很直观的展示了repvgg到底是什么意思,对比Resnet它仍然有着类似残差的结构,就是在3*3的卷积基础上弄了一个1*1的分支和一个identity分支(在步长不等于2且输入输出通道相等的情况下),这样除了方便推理过程的融合,似乎还有多分支的好处,因为有丰富的梯度信息(狗头保命),
YOLOv5-v6.0学习笔记
YOLOv5-6.0版本的Backbone主要分为Conv模块、CSPDarkNet53和SPPF模块。YOLOv5在Conv模块中封装了三个功能:包括卷积(Conv2d)、Batch Normalization和激活函数,同时使用autopad(k, p)实现了padding的效果。其中YOLOv
【损失函数:3】感知损失:Perceptual Loss、总变分损失(TV Loss)(附Pytorch实现)
提出感知损失的概念,用于实时超分辨任务和风格迁移任务,后来也被应用于更多的领域,在图像去雾方向也有不少工作使用到了感知损失,所以这里就细看一下感知损失具体是什么,该如何构造(说个题外话:我之前做实验,用VGG提取特征构造感知损失狂爆内存,然后直接放弃了,都怪设备太垃圾啊!!!)。
OpenCV实战(14)——图像线条提取
轮廓检测指在图像中,忽略背景和目标内部的纹理以及噪声干扰的影响实现目标轮廓提取的过程。轮廓检测是目标检测、形状分析、目标识别和目标跟踪等技术的重要基础。本节,我们介绍了如何使用轮廓检测算子 Canny 检测目标轮廓,同时讲解了霍夫变换及其变体概率霍夫变换,可以用于检测任何能够用参数方程表达的形状。
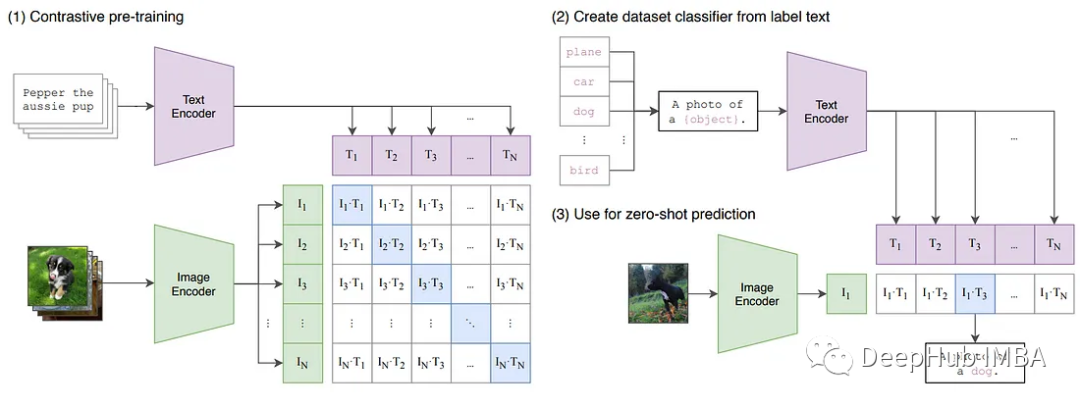
CLIP:语言-图像表示之间的桥梁
然而CLIP的多模态架构通过在相同的潜在空间中学习语言和视觉表现在二者之间建立了桥梁。因此,CLIP允许我们利用其他架构,使用它的“语言-图像表示”进行下游任务。
OpenAI 发布GPT-4——全网抢先体验
总的来说,GPT-4在推理能力上比GPT-3.5进步巨大,很多之前的问题都得到了修正和改良。我还没有测试GPT-4的多模能力,后面我会继续进行更多的测试,并即时更新文章分享给大家。
利用openpose提取自建数据集骨骼点训练st-gcn,复现st-gcn
利用openpose提取自建数据集骨骼点搭建st-gcn
人工智能|计算机视觉|深度学习CV岗面试经典问题总结
马上又到了金三银四的面试季啦。对于人工智能这个非常**卷**的行业来说,想找到一份好的实习或者工作还是很有难度的。下面总结一下**计算机视觉**方向常见的面试题目,赶快收藏,背起来吧!



