AI:218-保姆级YOLOv8细节检测改进 | 利用CARAFE上采样方法提升目标检测精度
CARAFE是一种基于内容感知的特征重组上采样方法。它主要通过利用特征图的局部上下文信息来进行内容感知的特征重组,从而提高上采样的精度。与传统的上采样方法(如转置卷积、双线性插值)相比,CARAFE能够更好地保留和增强特征图中的细节信息,对于提升目标检测的细节精度有显著效果。本文详细介绍了如何通过引
AI:214-改进YOLOv8目标检测网络 | 引入注意力机制、优化C2f、卷积层、Neck和检测头的综合提升
YOLOv8的网络结构大致分为四个部分:Backbone、Neck、Head和输出层。Backbone用于提取图像特征,Neck用于特征融合和增强,Head用于目标分类和定位。
AI:213-引入ODConv提升YOLOv8性能 | 动态卷积在目标检测中的应用与优化【保姆级实操】
ODConv是一种新型卷积操作,其核心思想是动态调整卷积核的参数,以适应不同的输入特征。ODConv通过引入多个维度的动态卷积,能够更好地捕捉空间和通道维度上的特征关系,从而提升模型的表达能力。
手把书教你使用YOLOv9训练自己的数据集(附YOLOv9网络结构图)
YOLOv9通过研究数据传输时的信息丢失问题,提出了可编程梯度信息(PGI)和通用高效层聚合网络(GELAN)架构,提高了参数利用率和模型性能。与SOTA方法相比,GELAN仅使用传统卷积算子即可实现更好的参数利用率。PGI适用于从轻型到大型的各种模型,使从头开始训练的模型能够获得更好的结果。YOL
<数据集>棉花识别数据集<目标检测>
YOLO与VOC格式的棉花开花程度识别数据集,适用于YOLO系列、Faster Rcnn、SSD等模型训练,类别:Bacterial Blight、Curl virus、Fussarium wilt、Healthy
基于opencv[python]的人脸检测
从这里可以清晰看到有1/3的图像没有成功检测到,后面我试试用Faster R-CNN模型,不过需要标注,数据量也大,这里先试着玩玩呗。
【YOLOv8十万长文全解】独家魔改优化技巧+附20余个源码手把手教程
【YOLOv8十万长文全解】v8 v9通用。独家魔改优化技巧+附20余个源码手把手教程; Hello,大家好,我是cv君,最近开始在空闲之余,经常更新文章啦!除目标检测、分类、分隔、姿态估计等任务外,还会涵盖图像增强领域,如超分辨率、画质增强、降噪、夜视增强、去雾去雨、ISP、海思高通成像ISP等、
YOLOv8改进 | 主干网络 | 增加网络结构增强小目标检测能力【独家创新——附结构图】
YOLOv8改进,小目标检测,yolov8
【AI大模型】Transformers大模型库(十一):Trainer训练类
在Hugging Face的Transformers库中,Trainer类是一个强大的工具,用于训练和评估机器学习模型。它简化了数据加载、模型训练、评估和日志记录的过程。
海康工业相机触发模式抓图和AI目标检测
本文实现用海康工业相机,触发模式,开发调试用软件触发,实际用硬件触发抓图,调用目标检测接口
人工智能--目标检测
区域卷积神经网络(Region-based Convolutional Neural Network,R-CNN)是目标检测领域的一个重要里程碑,为后续更先进的目标检测算法奠定了基础。🍈R-CNN 的详细工作原理R-CNN(Region-based Convolutional Neural Net
地平线旭日X3开发板基于MIPI Camera的目标检测 web 端展示调试记录
终于将MIPI Camera在web端显示出来了,其实很简单的事情,但是因为一个网络的问题,自己研究了好几天,查遍了论坛所有帖子,最后还是在地平线专家们的指导下,发现问题所在。言归正传,将自己的过程记录下来。想要在web端显示,需要以下准备工作。
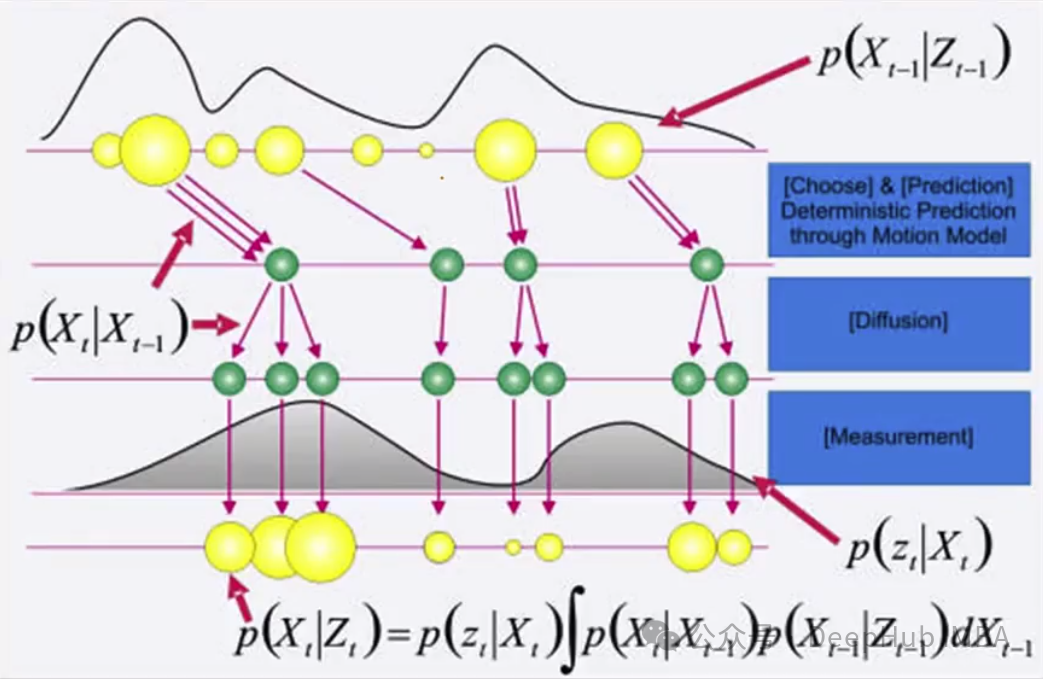
使用粒子滤波(particle filter)进行视频目标跟踪
粒子滤波是一种贝叶斯滤波方法,主要用于非线性、非高斯动态系统中的状态估计。它通过使用一组随机样本(称为粒子)来表示状态的后验概率分布,并通过这些粒子的加权平均来估计状态。
【YOLOV5 入门】——Gradio搭建Web GUI
Gradio 是一个用于构建机器学习模型演示界面和Web应用的开源库。提供了简单易用的界面,使您可以快速地将机器学习模型部署为交互式应用程序,而无需编写大量的前端代码。简单易用!!
OrangePi AI pro开发板首次上手体验目标检测实例,如此高效敏捷的开发方式令人震惊!
OrangePi AI pro 开发板
目标检测评价指标Precision、Recall、mAP
目标检测评估指标
【无标题】
自动驾驶技术是当今科技发展的前沿,行人检测是其中一个关键任务。YOLOv8可以高效地识别道路上的行人,提升自动驾驶系统的安全性和可靠性。在医疗影像中检测肿瘤可以辅助医生快速诊断和治疗。YOLOv8可以用来自动识别医学影像中的肿瘤区域,提高检测的效率和准确性。在工业生产过程中,产品的质量检测是保证生产
YoloV5、ShuffleNetV2、YoloV5-Lite网络概述
本文主要讲解了yolov5、ShuffleNetV2以及yolov5-Lite的网络结构相关知识
【人工智能Ⅱ】实验6:目标检测算法
实验6:目标检测算法一:实验目的与要求1:了解两阶段目标检测模型 RCNN或Faster RCNN模型的原理和结构。2:学习通过RCNN或Faster RCNN模型解决目标检测问题。二:实验内容常用的深度学习框架包括PyTorch和PaddlePaddle等,请选择一种深度学习框架,完成后续实验。2



