

ISAAC教程合集地址: https://blog.csdn.net/kunhe0512/category_12163211.html
文章目录
Flatsim
flatsim 代表平面世界模拟,是一个小型模拟应用程序,可让您运行几乎完整的 Isaac 导航堆栈。 flatsim 应用程序通过在给定的占用网格图中投射光线来模拟激光测距仪。 与全 3D 环境中成本更高的 3D 射线扫描相比,这种模拟速度极快。 因此,这是一种测试导航堆栈的快速且高性能的方法。
flatsim 应用程序无法提供与实际场景中基于全 3D 的模拟相同的精度,尤其是在反射或透明物体的精确模拟方面。
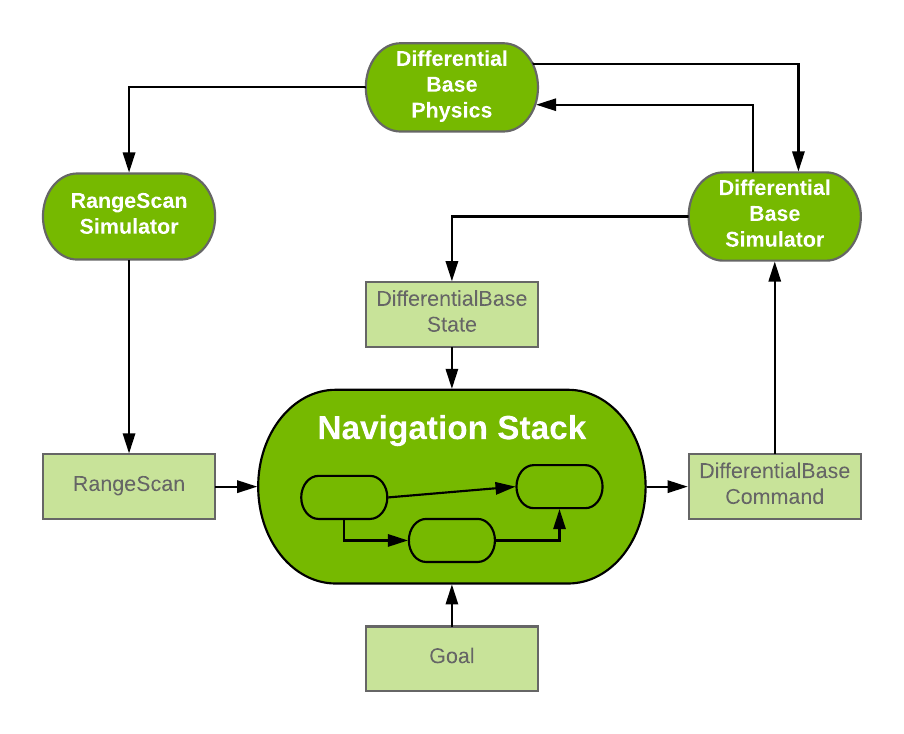
flatsim 使用导航堆栈中的节点集并添加两个新节点:
- DifferentialBaseSimulator:运行基本的差分基础驱动模型,根据从导航堆栈发送的命令移动机器人。 这为距离扫描模拟提供了机器人的地面真实姿态。 它还提供车轮里程计,用作导航堆栈的另一个输入。
- RangeScanSimulator:根据机器人的当前位置和所需地图计算模拟平面范围扫描。
运行 Flatsim 应用程序
- 使用以下命令从 Isaac 源代码树中启动 flatsim:
bob@desktop:~/isaac/sdk$ bazel run //packages/flatsim/apps:flatsim
- 在 Web 浏览器中通过 http://localhost:3000 加载 Sight Web 界面。
flatsim 应用程序默认以随机游走模式启动。 在这种模式下,代表机器人的点导航到地图上的随机目标。 当机器人到达目标时,一个新的目标被确定并且机器人向那个目标移动。
在 Flatsim 中使用交互式标记
作为 flatsim 的第一个实验,请执行以下步骤以将交互式标记添加到地图。 您可以单击此标记并将其拖动到地图上的不同位置。 当您这样做时,机器人会改变路线以移动到标记的新位置。
- 如果它尚未运行,请使用以下命令启动 flatsim:
bob@desktop:~/isaac/sdk$ bazel run //packages/flatsim/apps:flatsim
- 在 Web 浏览器中通过 http://localhost:3000 加载 Sight Web 界面。 机器人点开始导航到第一个随机目标。
- 在 Sight Web 界面右侧的配置部分,在“goals.goal_behavior”中,将所需的行为从“random”更改为“pose”。 机器人停止移动,因为您已更改其行为,但您尚未添加将配置为新行为目标的交互式标记。
- 在“flatsim - 地图视图”窗口中右键单击并选择“设置”。
- 在设置中,单击选择标记下拉菜单并选择“pose_as_goal”。
- 单击添加标记。
- 单击更新。 标记被添加到地图中,与仍然显示的随机游走目标分开。 您可能需要放大地图才能看到新标记。 机器人不会立即开始导航到标记。
- 单击标记并将其拖动到地图上的新位置。 机器人将开始导航到标记位置。
有关详细信息,请参阅交互式标记。
修改机器人生成位置
要更改模拟开始时机器人生成的位置,请打开 //packages/flatsim/apps/2d_differential_base_simulation.subgraph.json,找到 config.robot_spawn_pose.PoseInitializer.pose 部分,然后修改“rotation”和“translation”值 如所须。
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561
本文转载自: https://blog.csdn.net/kunhe0512/article/details/128894689
版权归原作者 扫地的小何尚 所有, 如有侵权,请联系我们删除。
版权归原作者 扫地的小何尚 所有, 如有侵权,请联系我们删除。