
最近接触了辅助驾驶,被其中的一些名词搞蒙了。
今天先来了解下所谓的ADAS域控制器。
所谓的ADAS域控制器,即承担了自动驾驶所需要的数据处理运算力,包括但不限于毫米波雷达、摄像头、激光雷达、GPS、惯导等设备的数据处理,也承担了自动驾驶下,底层核心数据、联网数据的安全。作为一个中枢,自动驾驶域控制器承上启下,很好的服务了汽车的智能化。
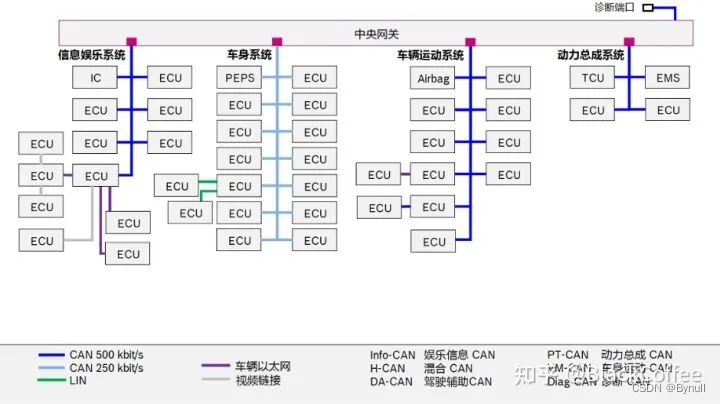
传统汽车电气架构
传统的汽车电子电气架构都是分布式的,汽车里的各个ECU都是通过CAN和LIN总线连接在一起,现代汽车里的ECU总数已经迅速增加到了几十个甚至上百个之多,整个系统复杂度越来越大,几近上限。
在今天软件定义汽车和汽车智能化、网联化的发展趋势下,这种基于ECU的分布式EEA也日益暴露诸多问题和挑战。
为了解决分布式EEA的这些问题,人们开始逐渐把很多功能相似、分离的ECU功能集成整合到一个比ECU性能更强的处理器硬件平台上,这就是汽车“域控制器(Domain Control Unit,DCU)”。
域控制器的出现是汽车EE架构从ECU分布式EE架构演进到域集中式EE架构的一个重要标志。
随着自动驾驶时代的来临,汽车驾驶所涉及的感知、控制、决策系统越来越复杂,系统与系统之间的信息交互、控制也越来越多,各方都希望其能变成一个模块化的、可移植性的、便于管理的汽车子系统。因此,汽车域控制器 DCU 的概念也就被提出了。
根据功能的不同,汽车网络架构可划分为车身域、动力域、底盘域、ADAS 域、外网域和信息娱乐域。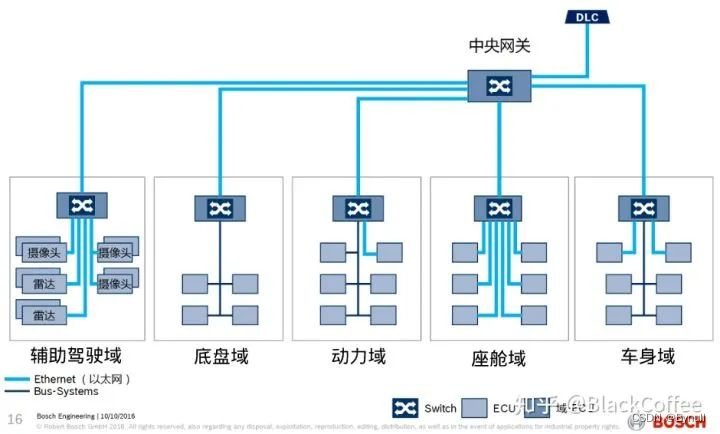
ADAS域控制器
ADAS 域控制器作为未来智能汽车重要的一个域,它具备多传感器融合,定位,路径规划,决策控制,无线通讯,高速通讯等能力。
可以灵活按客户要求实现所需功能的配置调整,方便实现平台化、模块化生产制造。
这样整车厂可以要求把结构相近的平台进行跨平台整合,更加方便生产,也增加对信息安全的防护,对整车厂是非常有利的。
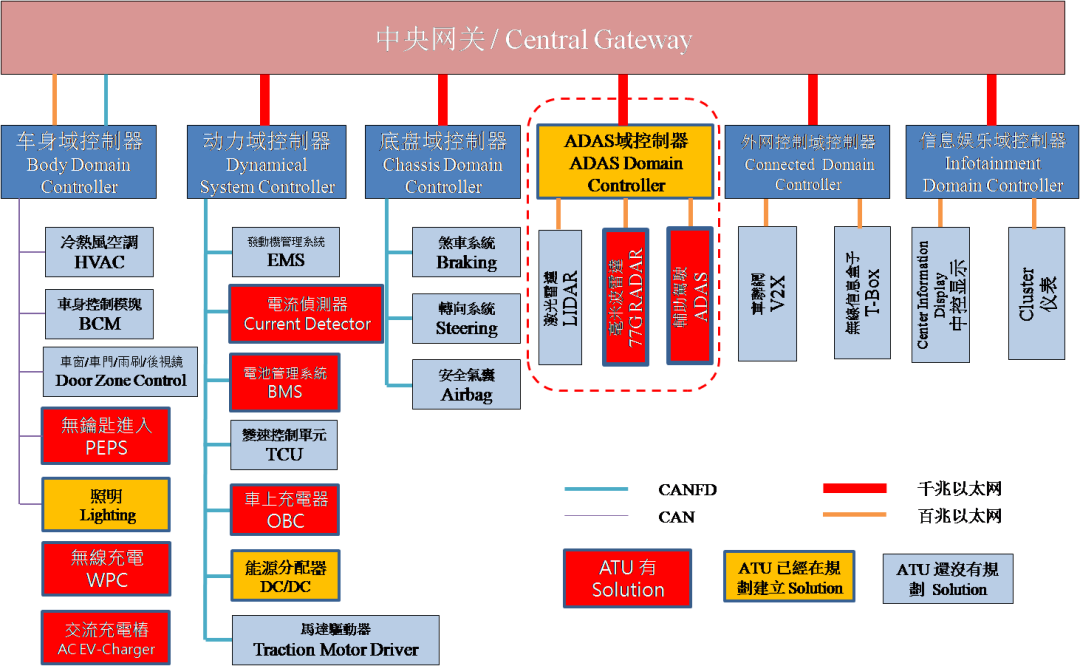
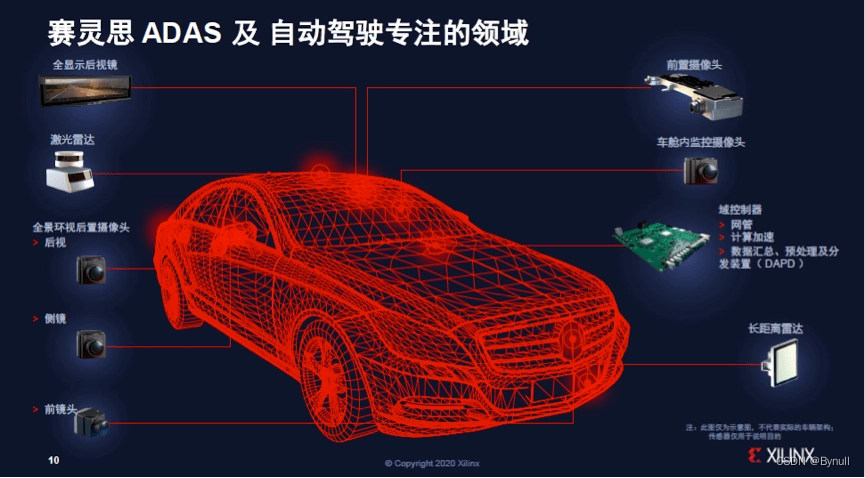
ADAS域控制器通常需要连接多个摄像头、毫米波雷达、激光雷达等传感器设备,要具备多传感器融合、定位、路径规划、决策控制、无线通讯、高速通讯的能力,要完成包含图像识别、传感器数据处理等诸多功能,因此要完成大量运算,域控制器一般都要匹配一个核心运算力强的处理器,能够提供自动驾驶不同级别算力的支持,目前业内有NVIDIA、华为、瑞萨、NXP、TI、Mobileye、赛灵思、地平线等多个方案。
下图为经纬的域控制器: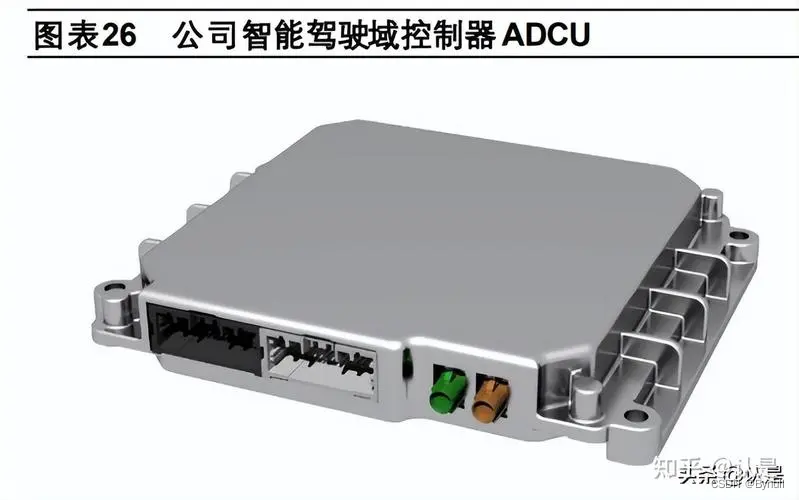
总而言之:ADAS域控制器的集中式架构使得配备ADAS的车辆能够处理来自不同传感器的数据,包括摄像头、毫米波雷达和激光雷达。
今天就到这里了,下课。_
版权归原作者 Bynull 所有, 如有侵权,请联系我们删除。