
两种图像增强评价指标:PSNR和SSIM
图像增强的评价指标在像素层面上通常包含平均绝对误差(MAE)、均方误差法(MSE)、峰值信噪比(PSNR)以及结构相似度(SSIM)。目前在图像增强领域比较权威的客观评价标准为峰值信噪比(PSNR)和结构相似度(SSIM)。
注:这两个指标都需要由标准图做参考(不是原图),也就是全参考指标
峰值信噪比PSNR
PSNR(Peak Signal to Noise Ratio)表示为峰值信号能量与噪声平均能量之比,一般取10lg以dB(分贝)为单位。噪声的平均能量又可以表示为真实图像与含噪图像的均方误差MSE(Mean Squared Error)。PSNR的计算方法如式所示, MAXI为信号能量峰值,bits为单通道像素值位深度,M、N为图像宽高, x(i,j)和x~(i,j) 分别表示增强后的图像与原图在像素点 (i,j)处的像素值。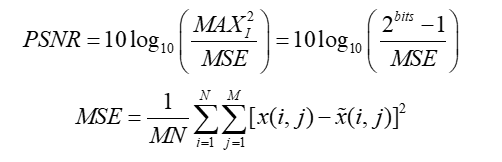
结构相似度SSIM
自然图像具有极高的结构性,表现为图像的像素间存在着很强的相关性,尤其是在空间相似的情况下。这些相关性在视觉场景中携带着关于物体结构的重要信息,通过分析结构信息是否改变可以判断图像的失真情况。大多数基于误差敏感度的图像质量评估指标,如MSE、PSNR,使用线性变换来分解图像信号,不涉及两图像之间的相关性,SSIM(Structural Similarity)给出了更直接的方法来比较失真图像和参考图像之间的结构差异,是一种衡量两幅图像相似度的指标,它从图像组合的角度将图像的结构信息定义为独立于亮度和对比度、反映场景中物体结构的属性,并将失真建模为亮度、对比度和结构三个不同因素的组合,从亮度相似性、对比度相似性和结构相似性三个方面综合评价图像质量,用均值作为亮度的估计、标准差作为对比度的估计、协方差作为结构相似程度的度量。
给定两幅图像 和 ,它们的结构相似度可以由式xx给出,其中,μ和 σ分别表示图像的均值和方差,σxy 表示图像x和图像y之间的协方差,C1和C2为常数,一般可取0。
SSIM取值为【-1,1】,当两幅图像完全相同时,SSIM取值为1。在实际应用中,一般采用高斯函数计算图像的均值、方差和协方差。由于图像的统计特征通常在空间中分布不均匀,通常对图像局部求取SSIM,再进行平均池化得到整幅图像的SSIM。
python实现
网上找的。
SSIM的代码
#相关操作#由于使用的高斯函数圆对称,因此相关操作和卷积操作结果相同
def correlation(img,kernal):
kernal_heigh = kernal.shape[0]
kernal_width = kernal.shape[1]
cor_heigh = img.shape[0] - kernal_heigh + 1
cor_width = img.shape[1] - kernal_width + 1
result = np.zeros((cor_heigh, cor_width), dtype=np.float64)foriin range(cor_heigh):
forjin range(cor_width):
result[i][j]=(img[i:i + kernal_heigh, j:j + kernal_width] * kernal).sum()return result
#产生二维高斯核函数#这个函数参考自:https://blog.csdn.net/qq_16013649/article/details/78784791
def gaussian_2d_kernel(kernel_size=11, sigma=1.5):
kernel = np.zeros([kernel_size, kernel_size])
center = kernel_size // 2if sigma ==0:
sigma =((kernel_size - 1) * 0.5 - 1) * 0.3 + 0.8
s =2 * (sigma ** 2)
sum_val =0foriin range(0, kernel_size):
forjin range(0, kernel_size):
x = i - center
y = j - center
kernel[i, j]= np.exp(-(x ** 2 + y ** 2) / s)
sum_val += kernel[i, j]
sum_val =1 / sum_val
return kernel * sum_val
#ssim模型
def ssim(distorted_image,original_image,window_size=11,gaussian_sigma=1.5,K1=0.01,K2=0.03,alfa=1,beta=1,gama=1):
distorted_image=np.array(distorted_image,dtype=np.float64)original_image=np.array(original_image,dtype=np.float64)if not distorted_image.shape == original_image.shape:
raise ValueError("Input Imagees must has the same size")if len(distorted_image.shape)>2:
raise ValueError("Please input the images with 1 channel")kernal=gaussian_2d_kernel(window_size,gaussian_sigma)#求ux uy ux*uy ux^2 uy^2 sigma_x^2 sigma_y^2 sigma_xy等中间变量ux=correlation(distorted_image,kernal)uy=correlation(original_image,kernal)distorted_image_sqr=distorted_image**2
original_image_sqr=original_image**2
dis_mult_ori=distorted_image*original_image
uxx=correlation(distorted_image_sqr,kernal)uyy=correlation(original_image_sqr,kernal)uxy=correlation(dis_mult_ori,kernal)ux_sqr=ux**2
uy_sqr=uy**2
uxuy=ux*uy
sx_sqr=uxx-ux_sqr
sy_sqr=uyy-uy_sqr
sxy=uxy-uxuy
C1=(K1*255)**2
C2=(K2*255)**2
#常用情况的SSIM
if(alfa==1 and beta==1 and gama==1):
ssim=(2*uxuy+C1)*(2*sxy+C2)/(ux_sqr+uy_sqr+C1)/(sx_sqr+sy_sqr+C2)return np.mean(ssim)#计算亮度相似性l=(2*uxuy+C1)/(ux_sqr+uy_sqr+C1)l=l**alfa
#计算对比度相似性sxsy=np.sqrt(sx_sqr)*np.sqrt(sy_sqr)c=(2*sxsy+C2)/(sx_sqr+sy_sqr+C2)c=c**beta
#计算结构相似性C3=0.5*C2
s=(sxy+C3)/(sxsy+C3)s=s**gama
ssim=l*c*s
return np.mean(ssim)
PSNR的代码
提供了两种方法,网上找的。
def psnr_A(img1, img2):
mse = np.mean((img1 /1.0- img2 /1.0)**2)
if mse <1e-10:
return 100
psnr1 =20* math.log10(255/ math.sqrt(mse))return psnr1
def psnr_B(img1, img2): # 第二种法:归一化
mse = np.mean((img1 /255.0- img2 /255.0)**2)
if mse <1e-10:
return 100
PIXEL_MAX =1
psnr2 =20* math.log10(PIXEL_MAX / math.sqrt(mse))return psnr2
版权归原作者 weixin_45246566 所有, 如有侵权,请联系我们删除。