
1. 下载
jetson_csi_cam
将此存储库克隆到您的
catkin_workspace
.
cd ~/catkin_workspace/src
git clone https://github.com/peter-moran/jetson_csi_cam.git
2. 安装
gscam
gstreamer-1.0 支持
克隆
gscam
到你的
catkin_workspace
.
cd ~/catkin_workspace/src
git clone https://github.com/ros-drivers/gscam.git
然后编辑
./gscam/Makefile
并将 CMake 标志添加
-DGSTREAMER_VERSION_1_x=On
到文件的第一行,使其显示为:
EXTRA_CMAKE_FLAGS = -DUSE_ROSBUILD:BOOL=1 -DGSTREAMER_VERSION_1_x=On
同时,如果您有该标记,只需要
gstreamer-0.1
与
gstreamer-1.0
同时安装,这是很好的做法,包括。
3.构建一切
现在,我们建立并注册
gscam
和
jetson_csi_cam
活性氧。
cd ~/catkin_workspace
catkin_make
source ~/.bashrc
打开视频流
要将相机的视频发布到 ROS(使用默认设置),请执行以下操作:
roslaunch jetson_csi_cam jetson_csi_cam.launch
等等,视频在哪里?此启动文件仅将视频发布到 ROS,使其可供其他程序使用。这是因为我们不想在每次使用相机时都查看视频(例如,计算机可能会先处理它)。因此,我们使用单独的程序来查看它。我将在后面的部分讨论这个问题,但如果你等不及了,请
rqt_image_view在新终端中运行以查看视频。
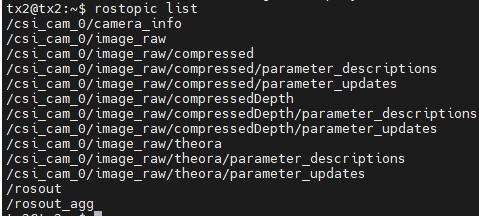
您可以通过输入
rostopic list
终端来确认视频正在运行。您应该能够看到该
/csi_cam/image_raw
主题(也就是您的视频)以及一堆具有相似名称的其他主题——除非您更改
camera_name
了默认参数。
设置视频选项
大多数时候,我们希望使用默认设置以外的设置。我们可以通过将命令行参数传递给
roslaunch
. 例如,如果我希望相机以 15 fps 的 4k 分辨率运行,我将使用以下命令:
roslaunch jetson_csi_cam jetson_csi_cam.launch width:=3840 height:=2160 fps:=15
换句话说,要设置任何参数使用
<arg_name>:=<arg_value>
的选项
roslaunch
。
报错的处理方式
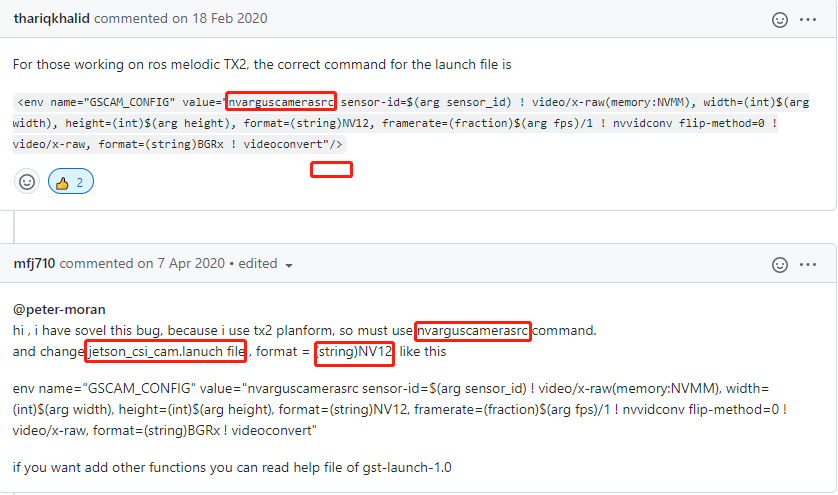
r 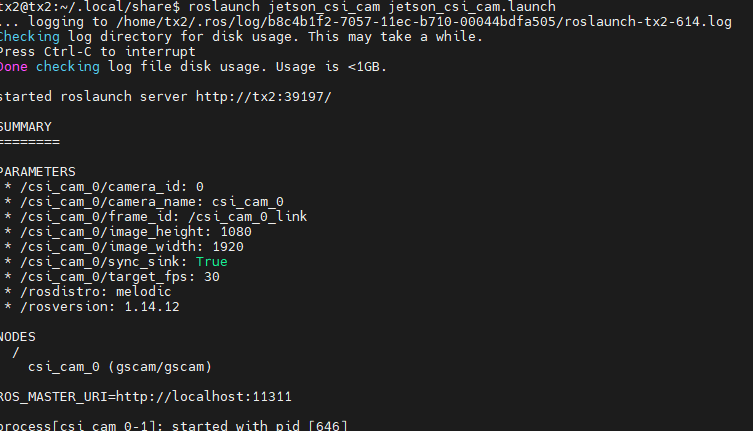

Connect CSI Camera on Jetson TX2 to ROS | SHIROKU.NET
GitHub - catterfyleo/jetson_csi_cam: A ROS package making it simple to use CSI cameras on the Nvidia Jetson TK1, TX1, or TX2 with ROS.
Gscam reports gst_uri_is_valid (uri) error on startup, but video still works. · Issue #1 · peter-moran/jetson_csi_cam · GitHub
版权归原作者 leoFY123 所有, 如有侵权,请联系我们删除。