
Autoware是世界上第一款开源的自动驾驶框架,当前各大自动驾驶公司的框架几乎都借鉴过,Autoware框架是理解自动驾驶系统知识最好的学习模板之一,同时利用仿真工具实现功能复现和整机联调也是增长实践经验的良好手段。
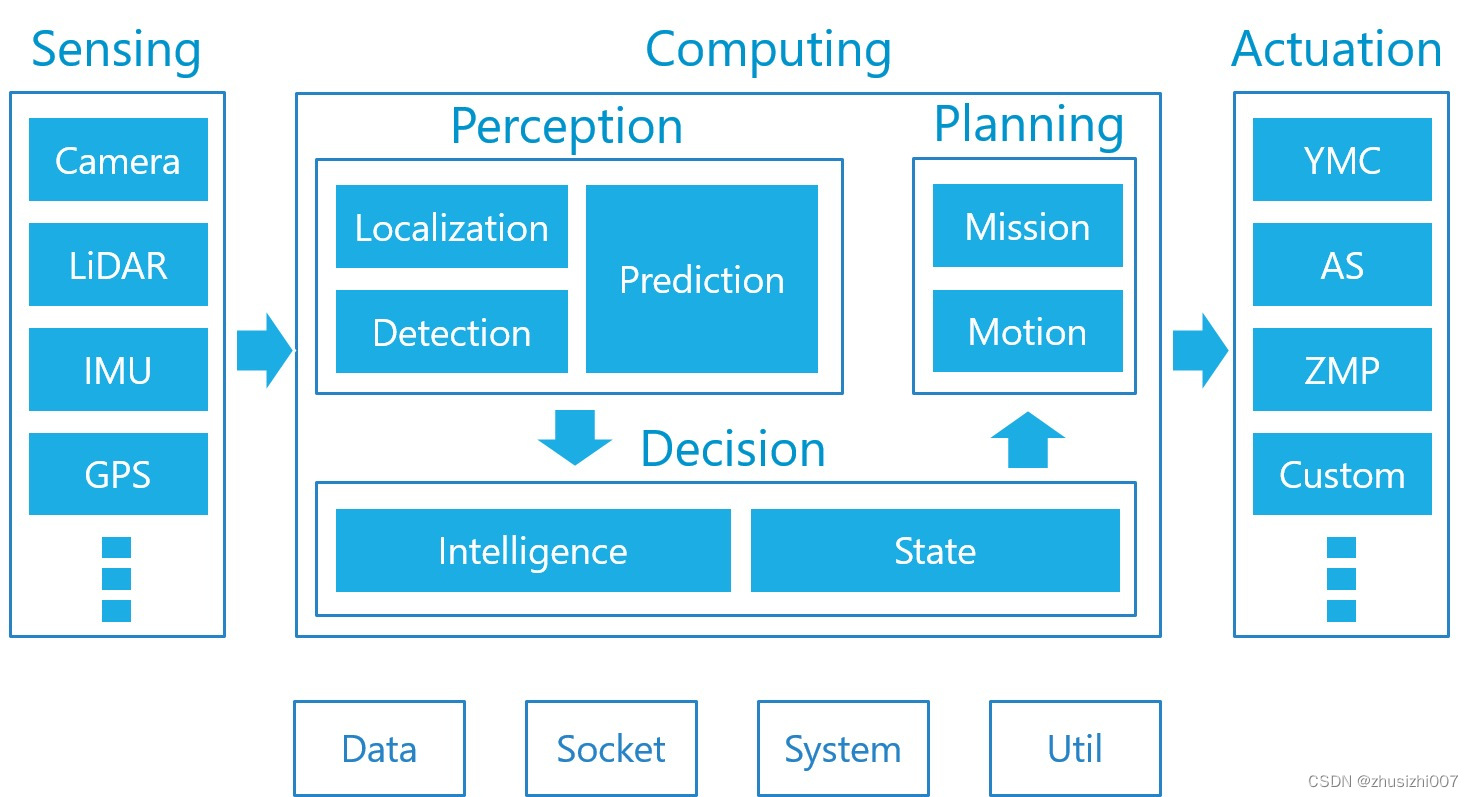
Autoware包含了自动驾驶所有关键技术模块:建图、定位、感知、规划和运动控制。
通过一个多月时间折腾掌握了如下心得:
1. 掌握了基于Ndt的定位建图算法的原理及源码分析,并在仿真环境下可视化功能复现;
2.理解了高精地图的概念,Vector map地图格式的解析,并掌握vector map的编辑工具;
3. 掌握了基于点云输入的目标物感知算法原理及源码分析,包括欧式聚类、形状估计和目标跟踪,并在仿真环境下可视化功能复现;
4. 掌握了规划决策路径轨迹的算法原理及源码分析,包括astar、open_planner等,并在仿真环境下可视化功能复现;
5. 掌握了运动控制的算法原理及源码分析,包括纯跟踪和MPC,并在仿真环境下可视化功能复现;
一、Autoware安装与环境配置
详见:Autoware1.12.1安装全流程及相关问题解决方案-C++文档类资源-CSDN下载
二、Autoware核心模块
2.1 建图模块
Autoware-建图_zhusizhi007的博客-CSDN博客
2.1.1 Ndt_mapping模块算法原理及源码剖析
2.1.2 Vector_map模块介绍与剖析
2.1.3 Autoware tool与Vector map绘制
2.2 定位模块
2.2.1 Ndt_matching模块算法原理及源码解析
2.2.2 gnss_localizer与lidar_localizer模块算法原理及源码分析
2.3 感知模块
2.3.1 lidar_detector模块算法原理
2.3.2 moving_predictor模块算法原理及源码解析
2.4 决策规划
2.4.1 Astar模块算法原理
2.4.2 Lane_planner与Open_planner规划模块算法原理解析
2.5 运动控制
2.5.1 MPC模块算法原理
2.6 仿真环境
2.6.1 仿真环境搭建
2.6.2 Simulation模块介绍及源码分析
2.7 传感器标定
2.8 waypoint制作
2.9 无人车与App、云端后台串联
三、实例
左侧:TaaS无人物流运输战情板
中间:无人车运行(订单与车辆状态)与rviz实时点云数据视频
右侧:智能移动服务APP
无人车循迹视频
战情板采用node.js为服务端,前段页面为js。
无人车传感器:Velodyne16线Lidar、Xsens IMU、超声波、摄像头、里程计;
无人车底盘由机器人底盘改造而来,采用麦克纳姆轮,可以实现原地转弯;
大脑:工控机安装Autoware
小脑:STM32安装底盘控制程序
APP:使用百度地图实时显示无人车轨迹,可以对无人车进行任务调度
未完待续,欢迎有兴趣朋友一起探讨,QQ:574226409 18682265246
版权归原作者 zhusizhi007 所有, 如有侵权,请联系我们删除。