
1. 简介
fusion_pointclouds 主要目的为Ubuntu环境下无人车多激光雷达标定之后, 将多个激光雷达点云话题/坐标系 通过PCL (Point Cloud Library)融合为 一个ros点云话题,以便于后期点云地面分割与地面处理等等。
1.1 应用场景
图1:为了保证激光雷达的360°环境覆盖,我们需要用到多传感器的拼接图2:只单纯融合激光雷达的信息,多激光雷达会发生重叠,因此需要点云坐标变换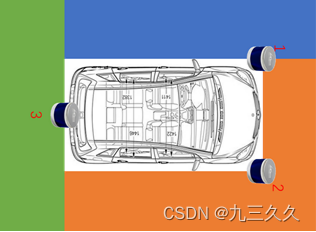
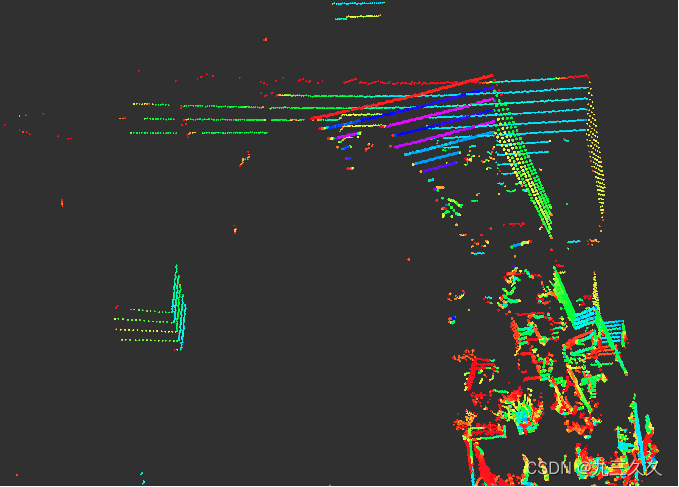
图3:激光雷达一定角度扫描车体本身,滤除车身周围干扰/遮挡点云,如图1白色区域,下图为pcl滤波效果图图4:雷达外参标定不一定十分精确,滤波需要估计车体大小也需调整。结合rqt_reconfigure 模块实现在线动态参数微调

图1-3均来源网络,只为表达场景需求,非商用。
1.2 项目内容
(1)点云的坐标变化;
(2)通过PCL(Point Cloud Library)融合为一个点云话题;
(3)通过条件滤波与直通滤波方式,可滤除车身周围干扰/遮挡点云与远处较弱点云;
(4)结合ros系统中 rqt_reconfigure 模块实现在线动态参数微调。
2.依赖介绍-ROS
若需在ROS环境下使用雷达驱动,则需安装ROS相关依赖库
Ubuntu 16.04 - ROS kinetic desktop-full
Ubuntu 18.04 - ROS melodic desktop-full (自带pcl-1.8,无需安装)
安装方式: 参考 Documentation - ROS Wiki 如果安装了ROS kinetic desktop-full版或ROS melodic desktop-full版,那么兼容版本其他依赖库也应该同时被安装了,所以不需要重新安装它们以避免多个版本冲突引起的问题, 因此,强烈建议安装desktop-full版,这将节省大量的时间来逐个安装和配置库。
3. 编译 & 运行
1.将 *fusion_pointclouds* 工程工作空间放入*src*文件夹内。
git clone https://github.com/Hliu0313/fusion_pointclouds.git
2.根据实际情况修改fusion_pointclouds/config/params.yaml
样例:详细可下载程序,查看。
fusion_lidar_num: 3 #融合 lidar 点云数量 2/3/4
topics: #订阅 lidar 点云话题
parent_pc_topic: "/front/rslidar_points"
child_pc_topic1: "/back/rslidar_points"
child_pc_topic2: "/left/rslidar_points"
child_pc_topic3: "/front/rslidar_points"
fusion_pc_topic: "/rslidar_points" #融合后发布点云话题名称
fusion_pc_frame_id: "/front_rslidar" #融合后发布点云话题名称
#注意
3.返回工作空间目录,执行以下命令即可编译&运行
catkin_make
source devel/setup.bash
** (1)注意:只做点云tf变换、融合与滤波,不启动rqt_reconfigure**
roslaunch fusion_pointclouds fusion_pointclouds.launch
** (2)启动rqt_reconfigure 动态调整参数,用于参数实时微调**
roslaunch fusion_pointclouds fusion_pointclouds.launch set_params:=true
4. 参数介绍
本工程只有一份参数文件 **
params.yaml
, 储存于
fusion_pointclouds/config
**文件夹内,配合
**load_params.h**
与
**load_params.cpp**
加载参数,方便随时修改。
(参数配置介绍在参数文件中已经描述较为详细,在此不做介绍)
5.改进方向
1.using PointCloud = pcl::PointCloudpcl::PointXYZIR;-点云包括带pcl::PointXYZIR,pcl::PointXYZI两种格式,设置自由切换入口,可参考rslidar_sdk
2.图像与激光雷达 动态可视化参数微调
3.初次写笔记请多多见谅,未来会积极的向前辈大佬们学习!
补充:
6. 功能包结构
主要程序为**fusion_pointclouds.cpp 与 fusion_pointclouds.h **其头文件。
>config
>>params.yaml -- 将参数上传至ros参数空间,方便程序获取参数,且可让程序订阅不同雷达话题,自定义发布话题名称及frame_id,增加了程序适应性;
>>set_params_bounds.cfg -- 生成 src/set_params_bounds.cpp头文件,调用动态参数程序—— rqt_reconfigure ;
>>set_params_tf.cfg -- 同上;
**>img **-- readme.md 调用图片;
>include
★★>>fusion_pointclouds.h** -**- 定义FusionPcNode类,函数实现流程 “接口?”;
>>load_params.h -- 配合 load_params.cpp 将ros参数空间参数加载至程序;
>launch
>>fusion_pointclouds.launch -- 主launch文件,通过参数重载,包含静态融合与动态调参;
>src
★★ >>**fusion_pointclouds.cpp **-- 对应fusion_pointclouds.h,函数具体实现;
>>load_params.cpp -- 同 load_params.h;
>>set_params_bounds.cpp -- 同set_params_bounds.cfg ;
>>set_params_tf.cpp -- 同上;
**>rviz **-- 启动 launch 调参时可以启动默认 rviz 界面,减少时间。
版权归原作者 九三久久 所有, 如有侵权,请联系我们删除。