
●项目名称
基于人工智能与边缘计算Aidlux的鸟类检测驱赶系统(可修改为coco 80类目标检测)
●项目简介
本项目在Aidlux上部署鸟类检测驱赶系统,通过视觉技术检测到有鸟类时,会进行提示。并可在源码上修改coco 80类目标检测索引直接检测其他79类目标,可以直接修改、快速移植到自己的项目中。
●预期效果
本项目使用利用安装AidLux的AidLux设备s855实现,可以让任何AidLux使用者快速上手,体验深度学习检测效果,提高开发乐趣。
边缘计算设备的优势主要包括以下几个方面:
节省带宽:边缘计算设备可以在源头处理数据,只传输重要的数据,从而节省带宽。
减少延迟:边缘计算设备可以减少等待时间,提高响应速度。
优化网络性能:边缘计算设备可以帮助企业实时分析和处理数据,从而提高网络性能。
提供本地化服务:边缘计算设备可以提供本地化服务,例如在智能城市、自动驾驶汽车和医疗保健行业中,边缘计算设备可以提供更快速、更准确的服务。
提高安全性:边缘计算设备可以减少数据传输过程中的安全风险,提高安全性。
对于大多数企业来说,coco的80类可支持大部分场景的预研、模拟,本项目将yolov5移植至AidLux,可在源码中直接修改类别,实现80类中任何一类的检测。
对于开发者而言,AI项目中各种算法的数据集准备+模型训练+模型部署依然存在着不小的难度。AidLux的出现,可以将我们的安卓设备以非虚拟的形式变成同时拥有Android和Linux系统环境的边缘计算设备,支持主流AI框架,非常易于部署,还有专门的接口调度算力资源,极大地降低了AI应用落地门槛。
Aidlux简介
Aidlux基于ARM架构的跨生态(Android/鸿蒙+Linux)一站式AIoT应用开发和部署平台
可在安卓手机(软硬件最低配置要求:①Android 系统版本 >= 6,②剩余存储空间 > 650MB (AidLux1.1),③CPU 支持 arm64-v8a 架构)
和其发布的边缘计算设备上运行、开发
下面上源码:
这里用opencv进行视频。我们检测鸟类图片,在coco 80类目标检测中索引为14(从0开始),所以设置sign=14,。如果是行人或者其他,直接修改sign的值为对应索引即可。
相关后处理函数utils.py
import cv2
import numpy as np
coco_class =['person','bicycle','car','motorcycle','airplane','bus','train','truck','boat','traffic light','fire hydrant','stop sign','parking meter','bench','bird','cat','dog','horse','sheep','cow','elephant','bear','zebra','giraffe','backpack','umbrella','handbag','tie','suitcase','frisbee','skis','snowboard','sports ball','kite','baseball bat','baseball glove','skateboard','surfboard','tennis racket','bottle','wine glass','cup','fork','knife','spoon','bowl','banana','apple','sandwich','orange','broccoli','carrot','hot dog','pizza','donut','cake','chair','couch','potted plant','bed','dining table','toilet','tv','laptop','mouse','remote','keyboard','cell phone','microwave','oven','toaster','sink','refrigerator','book','clock','vase','scissors','teddy bear','hair drier','toothbrush']defxywh2xyxy(x):'''
Box (center x, center y, width, height) to (x1, y1, x2, y2)
'''
y = np.copy(x)
y[:,0]= x[:,0]- x[:,2]/2# top left x
y[:,1]= x[:,1]- x[:,3]/2# top left y
y[:,2]= x[:,0]+ x[:,2]/2# bottom right x
y[:,3]= x[:,1]+ x[:,3]/2# bottom right yreturn y
defxyxy2xywh(box):'''
Box (left_top x, left_top y, right_bottom x, right_bottom y) to (left_top x, left_top y, width, height)
'''
box[:,2:]= box[:,2:]- box[:,:2]return box
defNMS(dets, thresh):'''
单类NMS算法
dets.shape = (N, 5), (left_top x, left_top y, right_bottom x, right_bottom y, Scores)
'''
x1 = dets[:,0]
y1 = dets[:,1]
x2 = dets[:,2]
y2 = dets[:,3]
areas =(y2-y1+1)*(x2-x1+1)
scores = dets[:,4]
keep =[]
index = scores.argsort()[::-1]while index.size >0:
i = index[0]# every time the first is the biggst, and add it directly
keep.append(i)
x11 = np.maximum(x1[i], x1[index[1:]])# calculate the points of overlap
y11 = np.maximum(y1[i], y1[index[1:]])
x22 = np.minimum(x2[i], x2[index[1:]])
y22 = np.minimum(y2[i], y2[index[1:]])
w = np.maximum(0, x22-x11+1)# the weights of overlap
h = np.maximum(0, y22-y11+1)# the height of overlap
overlaps = w*h
ious = overlaps /(areas[i]+areas[index[1:]]- overlaps)
idx = np.where(ious<=thresh)[0]
index = index[idx+1]# because index start from 1return dets[keep]defletterbox(img, new_shape=(640,640), color=(114,114,114), auto=True, scaleFill=False, scaleup=True, stride=32):# Resize and pad image while meeting stride-multiple constraints
shape = img.shape[:2]# current shape [height, width]ifisinstance(new_shape,int):
new_shape =(new_shape, new_shape)# Scale ratio (new / old)
r =min(new_shape[0]/ shape[0], new_shape[1]/ shape[1])ifnot scaleup:# only scale down, do not scale up (for better test mAP)
r =min(r,1.0)# Compute padding
ratio = r, r # width, height ratios
new_unpad =int(round(shape[1]* r)),int(round(shape[0]* r))
dw, dh = new_shape[1]- new_unpad[0], new_shape[0]- new_unpad[1]# wh paddingif auto:# minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride)# wh paddingelif scaleFill:# stretch
dw, dh =0.0,0.0
new_unpad =(new_shape[1], new_shape[0])
ratio = new_shape[1]/ shape[1], new_shape[0]/ shape[0]# width, height ratios
dw /=2# divide padding into 2 sides
dh /=2if shape[::-1]!= new_unpad:# resize
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom =int(round(dh -0.1)),int(round(dh +0.1))
left, right =int(round(dw -0.1)),int(round(dw +0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color)# add borderreturn img, ratio,(dw, dh)defpreprocess_img(img, target_shape:tuple=None, div_num=255, means:list=[0.485,0.456,0.406], stds:list=[0.229,0.224,0.225]):'''
图像预处理:
target_shape: 目标shape
div_num: 归一化除数
means: len(means)==图像通道数,通道均值, None不进行zscore
stds: len(stds)==图像通道数,通道方差, None不进行zscore
'''
img_processed = np.copy(img)# resizeif target_shape:# img_processed = cv2.resize(img_processed, target_shape)
img_processed = letterbox(img_processed, target_shape, stride=None, auto=False)[0]
img_processed = img_processed.astype(np.float32)
img_processed = img_processed/div_num
# z-scoreif means isnotNoneand stds isnotNone:
means = np.array(means).reshape(1,1,-1)
stds = np.array(stds).reshape(1,1,-1)
img_processed =(img_processed-means)/stds
# unsqueeze
img_processed = img_processed[None,:]return img_processed.astype(np.float32)defconvert_shape(shapes:tupleorlist, int8=False):'''
转化为aidlite需要的格式
'''ifisinstance(shapes,tuple):
shapes =[shapes]
out =[]for shape in shapes:
nums =1if int8 else4for n in shape:
nums *= n
out.append(nums)return out
defscale_coords(img1_shape, coords, img0_shape, ratio_pad=None):# Rescale coords (xyxy) from img1_shape to img0_shapeif ratio_pad isNone:# calculate from img0_shape
gain =min(img1_shape[0]/ img0_shape[0], img1_shape[1]/ img0_shape[1])# gain = old / new
pad =(img1_shape[1]- img0_shape[1]* gain)/2,(img1_shape[0]- img0_shape[0]* gain)/2# wh paddingelse:
gain = ratio_pad[0][0]
pad = ratio_pad[1]
coords[:,[0,2]]-= pad[0]# x padding
coords[:,[1,3]]-= pad[1]# y padding
coords[:,:4]/= gain
clip_coords(coords, img0_shape)return coords
defclip_coords(boxes, img_shape):# Clip bounding xyxy bounding boxes to image shape (height, width)
boxes[:,0].clip(0, img_shape[1], out=boxes[:,0])# x1
boxes[:,1].clip(0, img_shape[0], out=boxes[:,1])# y1
boxes[:,2].clip(0, img_shape[1], out=boxes[:,2])# x2
boxes[:,3].clip(0, img_shape[0], out=boxes[:,3])# y2defdetect_postprocess(prediction, img0shape, img1shape, conf_thres=0.25, iou_thres=0.45):'''
检测输出后处理
prediction: aidlite模型预测输出
img0shape: 原始图片shape
img1shape: 输入图片shape
conf_thres: 置信度阈值
iou_thres: IOU阈值
return: list[np.ndarray(N, 5)], 对应类别的坐标框信息, xywh、conf
'''
h, w, _ = img1shape
cls_num = prediction.shape[-1]-5
valid_condidates = prediction[prediction[...,4]> conf_thres]
valid_condidates[:,0]*= w
valid_condidates[:,1]*= h
valid_condidates[:,2]*= w
valid_condidates[:,3]*= h
valid_condidates[:,:4]= xywh2xyxy(valid_condidates[:,:4])
valid_condidates = valid_condidates[(valid_condidates[:,0]>0)&(valid_condidates[:,1]>0)&(valid_condidates[:,2]>0)&(valid_condidates[:,3]>0)]
box_cls = valid_condidates[:,5:].argmax(1)
cls_box =[]for i inrange(cls_num):
temp_boxes = valid_condidates[box_cls == i]if(len(temp_boxes)==0):
cls_box.append([])continue
temp_boxes = NMS(temp_boxes, iou_thres)
temp_boxes[:,:4]= scale_coords([h, w], temp_boxes[:,:4], img0shape).round()
temp_boxes[:,:4]= xyxy2xywh(temp_boxes[:,:4])
cls_box.append(temp_boxes[:,:5])return cls_box
defdraw_detect_res(img, all_boxes,sign):'''
检测结果绘制
'''
flag =False
img = img.astype(np.uint8)
color_step =int(255/len(all_boxes))for bi inrange(len(all_boxes)):iflen(all_boxes[bi])==0:continuefor box in all_boxes[bi]:
x, y, w, h =[int(t)for t in box[:4]]if bi != sign:continueif bi == sign:
flag =True
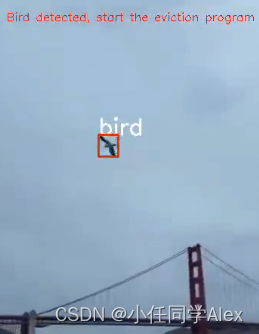
cv2.putText(img,"Bird detected, start the eviction program",(20,100),cv2.FONT_HERSHEY_SIMPLEX,0.5,(0,0,255),1)
cv2.putText(img,f'{coco_class[bi]}',(x, y), cv2.FONT_HERSHEY_SIMPLEX,1,(255,255,255),2)
cv2.rectangle(img,(x,y),(x+w, y+h),(0, bi*color_step,255-bi*color_step),thickness =2)return img,flag
yolov5_video源码:
# aidlux相关from cvs import*import aidlite_gpu
from utils import detect_postprocess, preprocess_img, draw_detect_res
import time
import requests
import cv2
# 加载模型
model_path ='yolov5s-fp16.tflite'# 定义输入输出shape
in_shape =[1*640*640*3*4]
out_shape =[1*25200*85*4,1*3*80*80*85*4,1*3*40*40*85*4,1*3*20*20*85*4]# 载入模型
aidlite = aidlite_gpu.aidlite()# 载入yolov5检测模型
aidlite.ANNModel(model_path, in_shape, out_shape,4,0)
sign =14#stop sign:11 bird:14
cap = cv2.VideoCapture("bird3.mp4")
fps = cap.get(cv2.CAP_PROP_FPS)
width =int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
height =int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))# 创建输出视频文件对象
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter('output_video3.mp4', fourcc, fps,(width, height))whileTrue:
ret , frame = cap.read()# if not ret:# breakif frame isNone:break# 预处理
img = preprocess_img(frame, target_shape=(640,640), div_num=255, means=None, stds=None)
aidlite.setInput_Float32(img,640,640)# 推理
aidlite.invoke()
pred = aidlite.getOutput_Float32(0)
pred = pred.reshape(1,25200,85)[0]
pred = detect_postprocess(pred, frame.shape,[640,640,3], conf_thres=0.5, iou_thres=0.45)
res_img, detec_taget = draw_detect_res(frame, pred, sign)if detec_taget !=True:
cv2.putText(res_img,"No birds detected, eviction program closed",(20,100),cv2.FONT_HERSHEY_SIMPLEX,0.5,(0,255,255),1)# #保存摄像头视频
out.write(res_img)
cvs.imshow(res_img)
cap.release()
out.release()# 关闭窗口
cv2.destroyAllWindows()# if detec_taget: # print("区域内有鸟出现,请驱逐") # out.write(res_img) # cv2.imshow('Result', res_img) # if cv2.waitKey(1) == ord('q'): # wait for 'q' key press to quit # break # cap.release() # out.release() # cv2.destroyAllWindows()
●操作流程
远程链接Aidlux,并找到home文件夹,将包含上述文件的文件夹上传
双击打开yolov5_video.py 并点击Bulid,然后找到Run Now 并点击运行
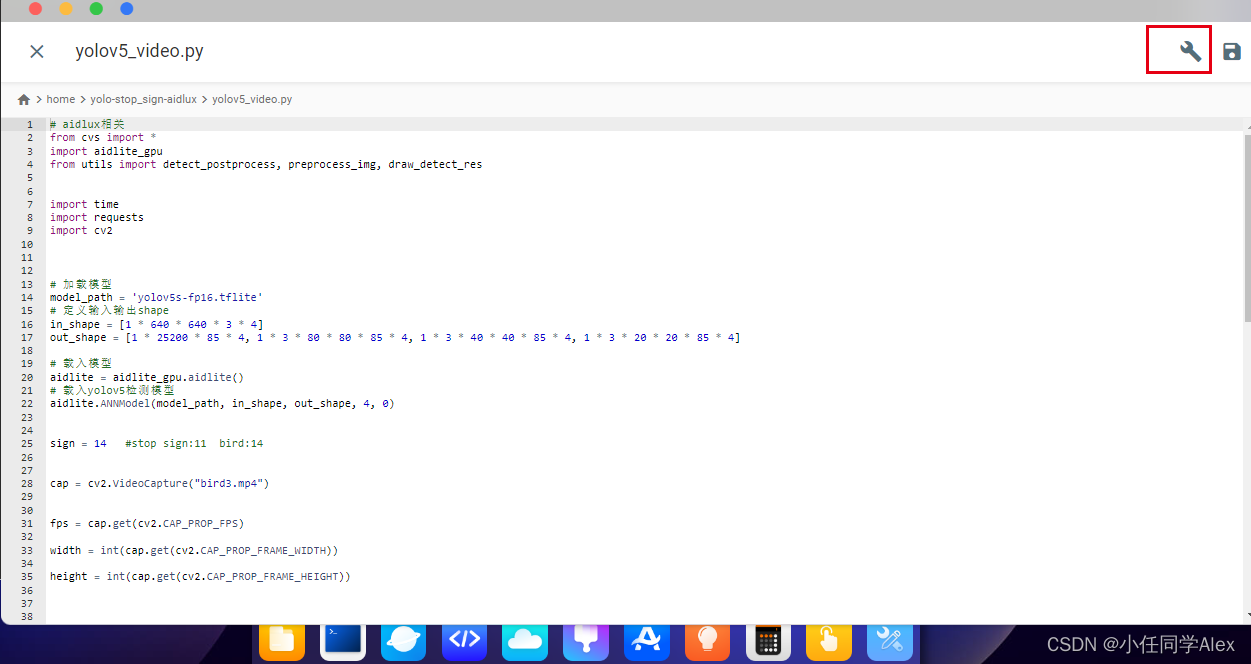
或者在终端里cd到yolov5_video.py所在文件夹,用 python yolov5_video.py运行
检测效果图:

演示视频:
基于人工智能与边缘计算Aidlux的鸟类检测驱赶系统
版权归原作者 小任同学Alex 所有, 如有侵权,请联系我们删除。