
群体智能
鸟群:
鱼群:

1.基本介绍
蚁群算法(Ant Colony Optimization, ACO)是一种模拟自然界蚂蚁觅食行为的优化算法。它通常用于解决路径优化问题,如旅行商问题(TSP)。
蚁群算法的基本步骤
初始化:设置蚂蚁数量、信息素重要程度、启发因子重要程度、信息素的挥发速率和信息素的初始量。
构建解:每只蚂蚁根据概率选择下一个城市,直到完成一次完整的路径。
更新信息素:在每条路径上更新信息素,通常新的信息素量与路径的质量成正比。
迭代:重复构建解和更新信息素的步骤,直到达到预设的迭代次数。
2.公式化蚁群算法
- 转移概率 P i j k P_{ij}^k Pijk 表示蚂蚁 k k k从城市 i i i转移到城市 j j j的概率。它是基于信息素强度 τ i j \tau_{ij} τij(信息素重要程度为 α \alpha α和启发式信息 η i j \eta_{ij} ηij)(启发式信息重要程度为 β \beta β )计算的: P i j k = [ τ i j ] α ⋅ [ η i j ] β ∑ l ∈ allowed k [ τ i l ] α ⋅ [ η i l ] β P_{ij}^k = \frac{[\tau_{ij}]^\alpha \cdot [\eta_{ij}]^\beta}{\sum_{l \in \text{allowed}k} [\tau{il}]^\alpha \cdot [\eta_{il}]^\beta} Pijk=∑l∈allowedk[τil]α⋅[ηil]β[τij]α⋅[ηij]β其中, allowed k \text{allowed}_k allowedk 是蚂蚁 k k k 可以选择的下一个城市集合。
- 信息素更新规则。在每次迭代结束后,所有路径上的信息素会更新。更新规则通常包括信息素的挥发和信息素的沉积: τ i j ← ( 1 − ρ ) ⋅ τ i j + Δ τ i j \tau_{ij} \leftarrow (1 - \rho) \cdot \tau_{ij} + \Delta \tau_{ij} τij←(1−ρ)⋅τij+Δτij其中,( ρ \rho ρ ) 是信息素的挥发率,( Δ τ i j \Delta \tau_{ij} Δτij ) 是本次迭代中所有蚂蚁在路径 ( i , j ) (i, j) (i,j) 上留下的信息素总量,通常计算方式为_ Δ τ i j = ∑ k = 1 m Δ τ i j k \Delta \tau_{ij} = \sum_{k=1}^{m} \Delta \tau_{ij}^k Δτij=∑k=1mΔτijk而对于每只蚂蚁 k k k ,在路径 ( i , j ) (i, j) (i,j) 上留下的信息素量 Δ τ i j k \Delta \tau_{ij}^k Δτijk 通常与其走过的路径长度成反比: Δ τ i j k = { Q L k , if ant k travels on edge ( i , j ) 0 , otherwise \Delta \tau_{ij}^k= \begin{cases} \frac{Q}{L_k}, & \text{if ant } k \text{ travels on edge } (i, j) \ 0, & \text{otherwise} \end{cases} Δτijk={LkQ,0,if ant k travels on edge (i,j)otherwise这里, Q Q Q是一个常数, L k L_k Lk是蚂蚁 k k k的路径长度。
- 启发式信息 ( η i j \eta_{ij} ηij ) 通常是目标函数的倒数,例如在TSP问题中,它可以是两城市间距离的倒数: η i j = 1 d i j \eta_{ij} = \frac{1}{d_{ij}} ηij=dij1其中, d i j d_{ij} dij 是城市 i i i和 j j j 之间的距离。
这些公式构成了蚁群算法的数学基础。通过调整参数
α
\alpha
α ,
β
\beta
β, 和
ρ
\rho
ρ,可以控制算法的搜索行为,从而适应不同的优化问题。
3.代码实现
import numpy as np
import matplotlib.pyplot as plt
classAntColonyOptimizer:def__init__(self, distances, n_ants, n_best, n_iterations, decay, alpha=1, beta=1):# 初始化参数
self.distances = distances # 城市间的距离矩阵
self.pheromone = np.ones(self.distances.shape)/len(distances)# 初始化信息素矩阵
self.all_inds =range(len(distances))# 所有城市的索引
self.n_ants = n_ants # 蚂蚁数量
self.n_best = n_best # 每轮保留的最佳路径数
self.n_iterations = n_iterations # 迭代次数
self.decay = decay # 信息素的挥发率
self.alpha = alpha # 信息素重要程度
self.beta = beta # 启发因子的重要程度defrun(self):# 运行算法
shortest_path =None
shortest_path_length =float('inf')for iteration inrange(self.n_iterations):# 对每次迭代
all_paths = self.gen_all_paths()# 生成所有蚂蚁的路径
self.spread_pheromone(all_paths, self.n_best, shortest_path_length)# 更新信息素
shortest_path, shortest_path_length = self.find_shortest_path(all_paths)# 找到最短路径
self.plot_paths(shortest_path, iteration, shortest_path_length)# 绘制路径return shortest_path, shortest_path_length
defgen_path_dist(self, path):# 计算路径长度
total_dist =0for i inrange(len(path)-1):
total_dist += self.distances[path[i], path[i+1]]return total_dist
defgen_all_paths(self):# 生成所有蚂蚁的路径
all_paths =[]for _ inrange(self.n_ants):
path =[np.random.randint(len(self.distances))]# 选择一个随机起点whilelen(path)<len(self.distances):
move_probs = self.gen_move_probs(path)# 生成移动概率
next_city = np_choice(self.all_inds,1, p=move_probs)[0]# 选择下一个城市
path.append(next_city)
all_paths.append((path, self.gen_path_dist(path)))# 添加路径和长度return all_paths
defspread_pheromone(self, all_paths, n_best, shortest_path_length):# 更新信息素
sorted_paths =sorted(all_paths, key=lambda x: x[1])# 按路径长度排序for path, dist in sorted_paths[:n_best]:# 只取最好的n_best条路径for i inrange(len(path)-1):
self.pheromone[path[i], path[i+1]]+=1.0/ self.distances[path[i], path[i+1]]deffind_shortest_path(self, all_paths):# 寻找最短路径
shortest_path =min(all_paths, key=lambda x: x[1])# 根据路径长度找到最短的那条return shortest_path[0], shortest_path[1]defgen_move_probs(self, path):# 生成移动概率
last_city = path[-1]
probs = np.zeros(len(self.distances))for i in self.all_inds:if i notin path:
pheromone = self.pheromone[last_city, i]** self.alpha
heuristic =(1.0/ self.distances[last_city, i])** self.beta
probs[i]= pheromone * heuristic
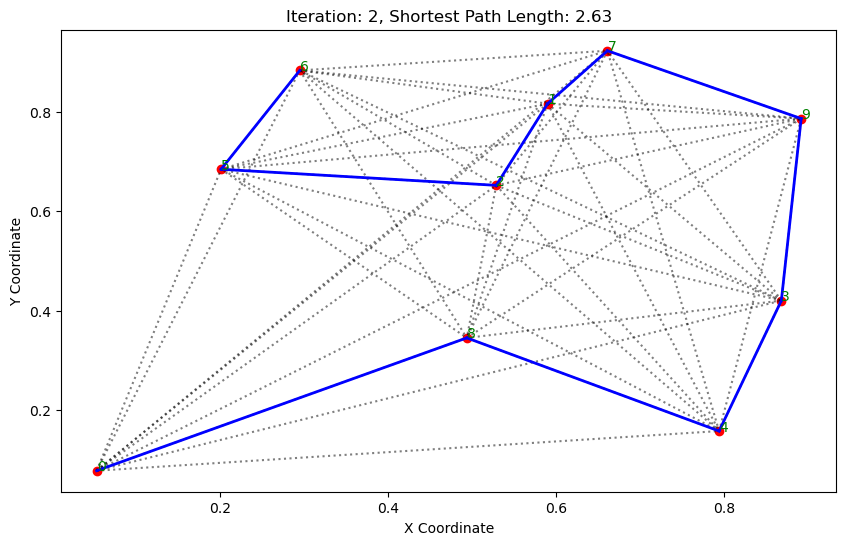
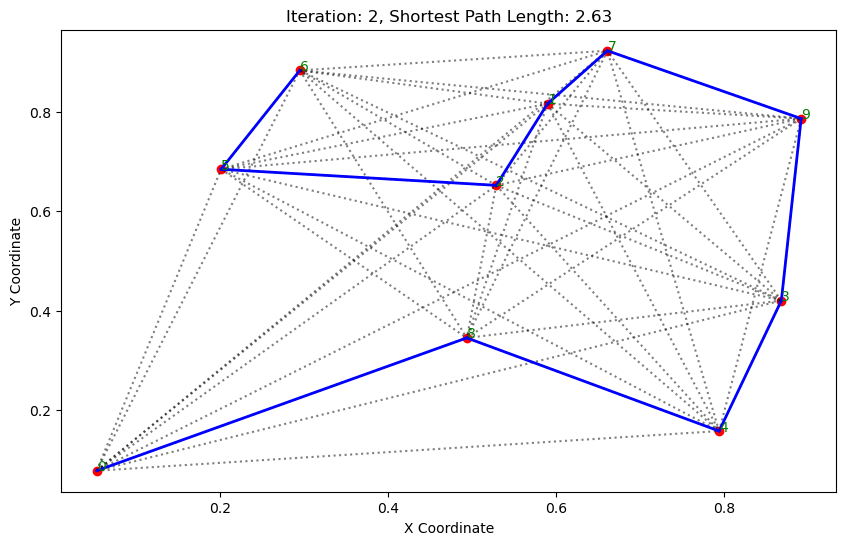
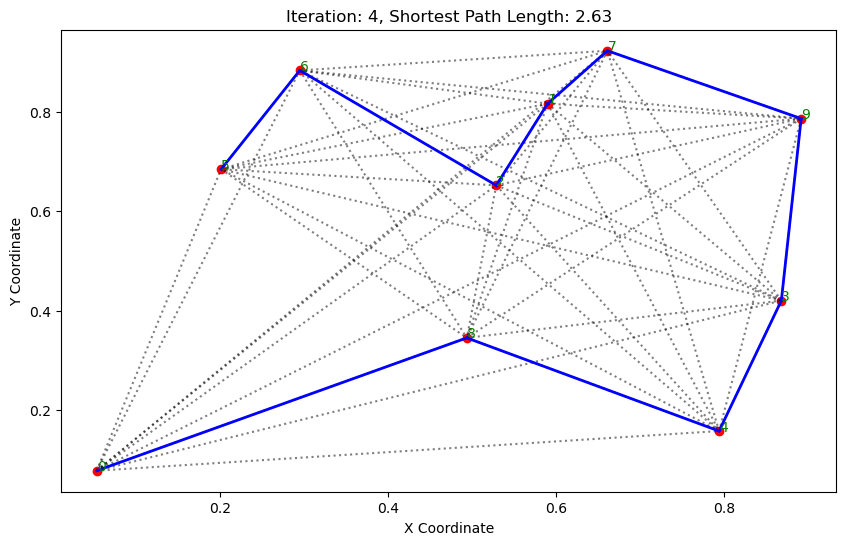
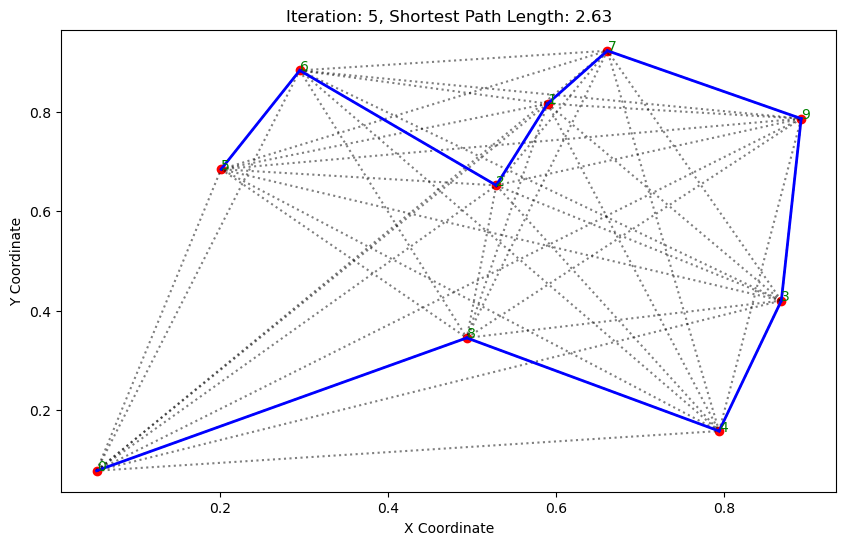
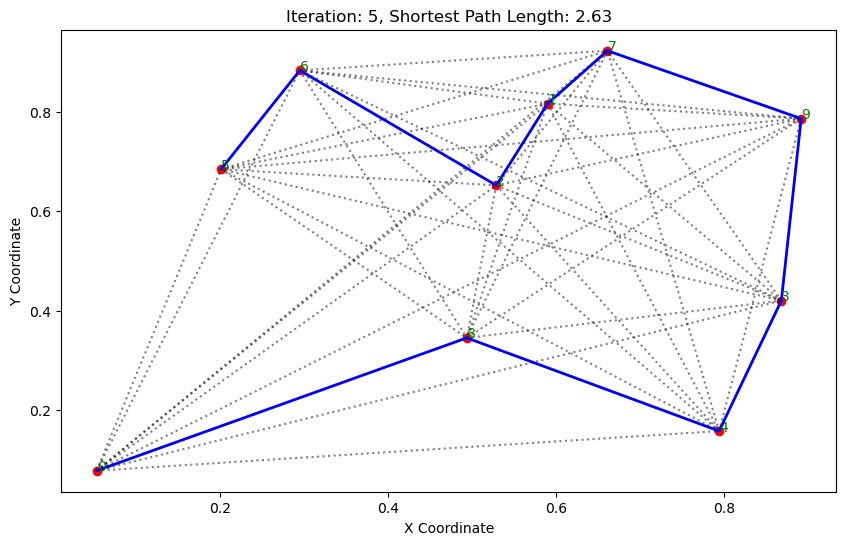
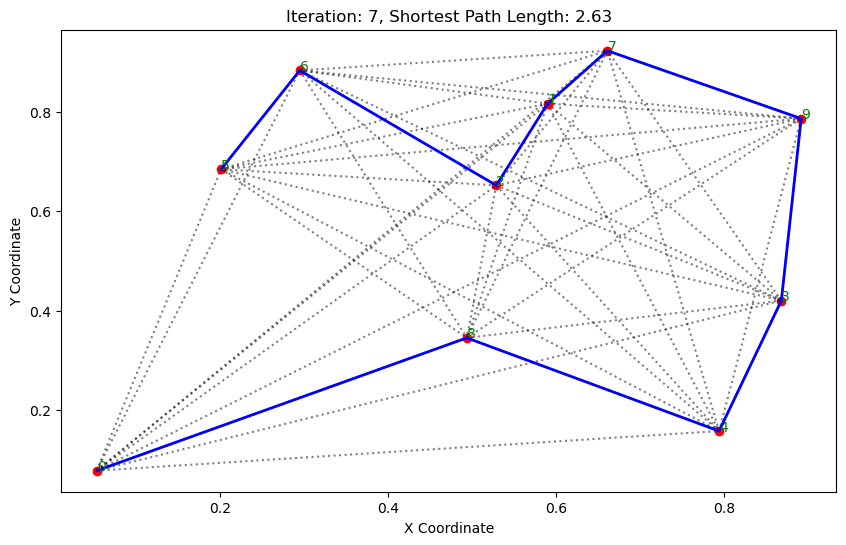
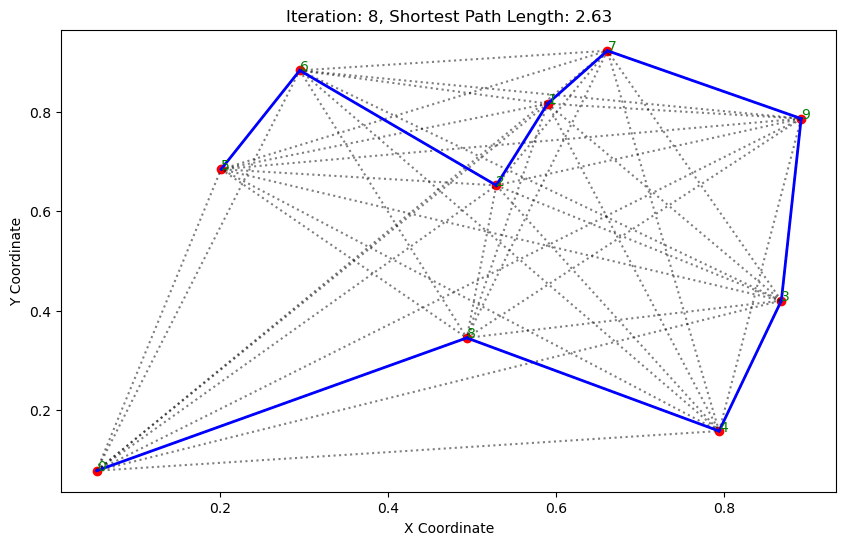
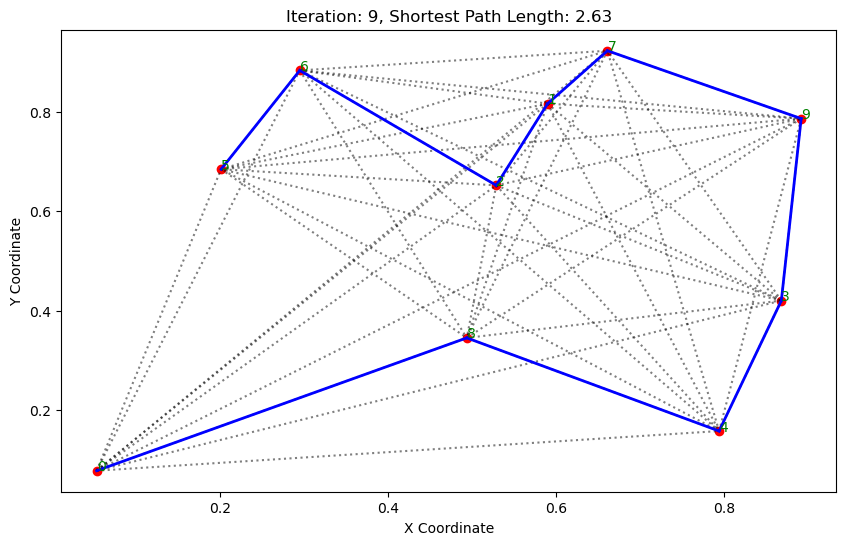
return probs / probs.sum()defplot_paths(self, best_path, iteration, path_length):# 绘制路径
plt.figure(figsize=(10,6))for i inrange(len(coords)):# 绘制所有可能的路径for j inrange(i+1,len(coords)):
plt.plot([coords[i][0], coords[j][0]],[coords[i][1], coords[j][1]],'k:', alpha=0.5)for i inrange(len(best_path)-1):# 绘制最短路径
start_city = best_path[i]
end_city = best_path[i+1]
plt.plot([coords[start_city][0], coords[end_city][0]],[coords[start_city][1], coords[end_city][1]],'b-', linewidth=2)
plt.scatter(*zip(*coords), color='red')# 标记城市位置for i, coord inenumerate(coords):# 添加城市标签
plt.text(coord[0], coord[1],str(i), color='green')
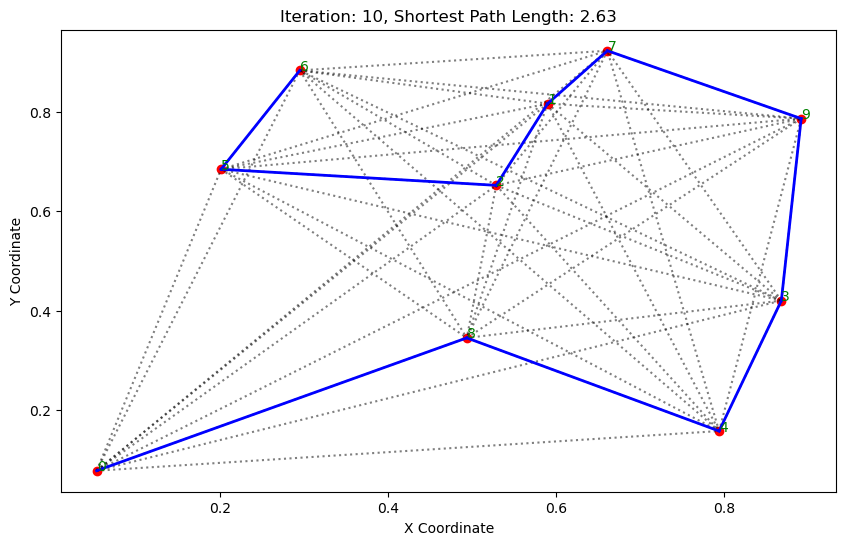
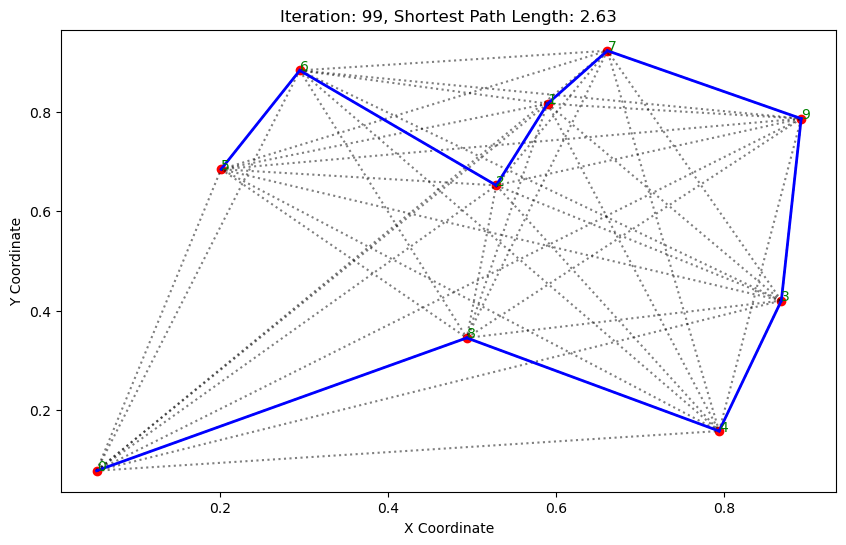
plt.title(f'Iteration: {iteration}, Shortest Path Length: {round(path_length,2)}')
plt.xlabel('X Coordinate')
plt.ylabel('Y Coordinate')
plt.show()defnp_choice(a, size, replace=True, p=None):# numpy的随机选择函数return np.array(np.random.choice(a, size=size, replace=replace, p=p))# 城市坐标
coords = np.random.rand(10,2)# 假设有10个城市# 计算距离矩阵
distances = np.zeros((10,10))for i inrange(10):for j inrange(10):
distances[i, j]= np.linalg.norm(coords[i]- coords[j])# 使用欧几里得距离# 运行蚁群算法
aco = AntColonyOptimizer(distances, n_ants=10, n_best=5, n_iterations=100, decay=0.5, alpha=1, beta=2)
path, dist = aco.run()
执行结果:


.
.
.
.
.
.
......
......
本文转载自: https://blog.csdn.net/weixin_46160781/article/details/135188729
版权归原作者 北纬40度~ 所有, 如有侵权,请联系我们删除。
版权归原作者 北纬40度~ 所有, 如有侵权,请联系我们删除。