
基本思想:一直想学rk3588的视频编解码,奈何没有设备,最近获得机会,利用空闲时间好好研究一番,正好手中的深度相机oak camera支持视频编码,逐想用软解编码和瑞芯微的mpp硬解码去走一波,本实验使用的poe-rj45接口和usb低电压接口测试
测试数据
硬件:rk3588s开发板
oak-d s2深度相机(usb接口)
技术:
rk3588s mpp硬解码
oak h264编码(最高帧率60fps)
yolov7-tiny 单目标检测
硬件频率设置:
cpu 频率 408000
dmc频率 2112000000
npu频率 1000000000
目标检测准确的情况下,测试数据如下:
解码 总帧率 56-60fps
解码+640推理(15ms)总帧率 32fps
解码+416推理(7ms) 总帧率 47fps
解码+320推理(4ms) 总帧率 48-54fps



首先准备测试视频,截取20s的视频链接: https://pan.baidu.com/s/1_3wff-xizk4G1xBluTtsmQ?pwd=fmc9 提取码: fmc9
ubuntu@ubuntu:~/test_rk3588_mpp$ ffmpeg -ss 00:00:00 -i 1920x1080.mp4 -to 00:00:20 -c:v copy -c:a copy 1920x1080_min.mp4
预先转h264
ubuntu@ubuntu:~/test_rk3588_mpp$ ffmpeg -i 1920x1080_min.mp4 -codec copy -bsf: h264_mp4toannexb -f h264 1920x1080_min.h264
一、进入系统
ubuntu@ubuntu:~$ ssh [email protected]
The authenticity of host '192.168.71.30 (192.168.71.30)' can't be established.
ECDSA key fingerprint is SHA256:EABsn4kWnfnqvYNreTaJf6QPvgKnvJPYSFBDsQglD8k.
Are you sure you want to continue connecting (yes/no/[fingerprint])? yes
Warning: Permanently added '192.168.71.30' (ECDSA) to the list of known hosts.
[email protected]'s password:
_____ _ __ _
| ___(_)_ __ ___ / _| |_ _
| |_ | | '__/ _ \ |_| | | | |
| _| | | | | __/ _| | |_| |
|_| |_|_| \___|_| |_|\__, |
|___/
Welcome to Ubuntu 20.04.4 LTS (GNU/Linux 5.10.110-rt53 aarch64)
* Documentation: http://wiki.t-firefly.com
* Management: http://www.t-firefly.com
System information as of Sun Jun 26 04:18:31 UTC 2022
System load: 0.86 0.93 0.67 Up time: 18:42 hours Local users: 2
Memory usage: 34 % of 3464MB IP: 192.168.71.30
Usage of /: 1% of 23G
The programs included with the Ubuntu system are free software;
the exact distribution terms for each program are described in the
individual files in /usr/share/doc/*/copyright.
Ubuntu comes with ABSOLUTELY NO WARRANTY, to the extent permitted by
applicable law.
1)下载源码和测试mpp
测试命令
firefly@firefly:~$ git clone https://github.com/rockchip-linux/mpp.git
firefly@firefly:~$ cd mpp
firefly@firefly:~/mpp$ mkidr build
firefly@firefly:~/mpp/build$ cmake ..&make&sudo make install
firefly@firefly:~/mpp/build/test$ sudo ./mpi_dec_test -t 7 -i 1920x1080_min.h264 -f 4 -h 1080 -w 1920 -o 1920x1080_min.nv12
firefly@firefly:~/mpp/build/test$ ffplay -f rawvideo -video_size 1920*1080 -pixel_format nv12 1920x1080_min.nv12
可以播放

监控日志
firefly@firefly:~$ watch -n 1 tail -f /var/log/syslog
....
Every 1.0s: tail -f /var/log/syslog firefly: Mon Jan 16 07:43:58 2023
Jan 16 07:43:56 firefly mpp[12221]: mpi_dec_test: 0x5587aa7160 decode get frame 1896
Jan 16 07:43:57 firefly mpp[12221]: mpi_dec_test: 0x5587aa7160 decode get frame 1897
Jan 16 07:43:57 firefly mpp[12221]: mpi_dec_test: 0x5587aa7160 decode get frame 1898
Jan 16 07:43:57 firefly mpp[12221]: mpi_dec_test: 0x5587aa7160 decode get frame 1899
2)下载源码和测试(摘自官方测试)ff_media
# 根据操作系统获取源码
git clone https://gitlab.com/firefly-linux/ff_media -b ubuntu20.04
# 安装所需环境
apt install gcc g++ make cmake
apt install libasound2-dev
apt install libopencv-dev
# 编译
cd ff_media
mkdir build; cd build
cmake ../
make
# 运行 demo
## 直接运行 demo 可以查看帮助信息
INFO: usage: Usage: ./demo <Input source> [Options]
Options:
-i, --input Input image size
-o, --output Output image size, default same as input
-a, --inputfmt Input image format, default MJPEG
-b, --outputfmt Output image format, default NV12
-c, --count Instance count, default 1
-d, --drmdisplay Drm display, set display plane, set 0 to auto find plane, default disabled
-e, --encodetype Encode encode, set encode type, default disabled
-f, --file Enable save dec output data to file, set filename, default disabled
-p, --port Enable rtsp stream, set push port, depend on encode enabled, default disabled
-m, --enmux Enable save encode data to mp4 file, depend on encode enabled, default disabled
-r, --rotate Image rotation degree, default 0
0: none
1: vertical mirror
2: horizontal mirror
90: 90 degree
180: 180 degree
270: 270 degree
## 示范:输入是分辨率为 1080p 的 rtsp 摄像头,把解码图像缩放为 720p 输出到显示器上。
./demo 1920x1080.h264 -o 1280x720 -d 0
#打开usb相机
./demo /dev/video12 -i 640x480 -o 640x480 -d 0
测试没问题,速度很快,下一步需要结合官方提供的demo和例子,修改自己可以用的代码
二、先用笔记本测试ffmpeg软解码h264
1)测试软解码在54fps
cmake_minimum_required(VERSION 3.16)
project(untitled1)
find_package(OpenCV REQUIRED)
set(CMAKE_CXX_STANDARD 14)
add_executable(untitled1 main.cpp)
target_link_libraries(untitled1
${OpenCV_LIBS}
-lavformat -lavcodec -lswscale -lavutil -lz
)
测试代码
#include <stdio.h>
#include <string>
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
extern "C"
{
#include "libavcodec/avcodec.h"
#include "libavformat/avformat.h"
#include "libswscale/swscale.h"
#include "libavutil/avutil.h"
#include "libavutil/imgutils.h"
};
#include <chrono>
#include <iomanip>
using namespace std;
using namespace chrono;
int main(int argc, char *argv[]) {
const char *path = "/home/ubuntu/test_rk3588_mpp/1920x1080.h264";
// AVDictionary *optional=NULL;
// av_dict_set(&optional,"stimeout","6000000",0);
// av_dict_set(&optional,"rstp_transport","tcp",0);
// av_dict_set(&optional,"buffer_size","1024000",0);
// av_dict_set(&optional,"max_delay","500000",0);
AVFormatContext *pFormat = NULL;
int ret = avformat_open_input(&pFormat, path, NULL, NULL);
if (ret < 0) {
perror("avformat_open_input");
avformat_free_context(pFormat);
return -1;
}
// av_dict_free(&optional);
printf("avformat_open_input successfully\n");
ret = avformat_find_stream_info(pFormat, NULL);
if (ret < 0) {
perror("avformat_find_stream_info\n");
return -1;
}
printf("avformat_find_stream_info successfully\n");
int time = pFormat->duration;
int mbittime = (time / 100000) / 60;
int mminttime = (time / 100000) % 60;
printf("video time: %d'm %d's\n", mbittime, mminttime);
av_dump_format(pFormat, 0, path, 0);
int videoindex = -1;
for (int i = 0; i < pFormat->nb_streams; i++) {
if (pFormat->streams[i]->codecpar->codec_type == AVMEDIA_TYPE_VIDEO) {
videoindex = i;
break;
}
}
if (videoindex == -1) {
printf("don't find video stream\n");
return -1;
}
AVCodecParameters *codecParameters = pFormat->streams[videoindex]->codecpar;
printf("video width %d\n", codecParameters->width);
printf("video height %d\n", codecParameters->height);
AVCodec *pCodec = avcodec_find_decoder(codecParameters->codec_id);
AVCodecContext *pCodecCtx = avcodec_alloc_context3(pCodec);
ret = avcodec_open2(pCodecCtx, pCodec, NULL);
if (ret < 0) {//打开解码器
printf("Could not open codec.\n");
return -1;
}
AVFrame *picture = av_frame_alloc();
picture->width = codecParameters->width;
picture->height = codecParameters->height;
picture->format = AV_PIX_FMT_YUV420P;
ret = av_frame_get_buffer(picture, 1);
if (ret < 0) {
printf("av_frame_get_buffer error\n");
return -1;
}
printf("picture->linesize[0] %d\n", picture->linesize[0]);
AVFrame *pFrame = av_frame_alloc();
pFrame->width = codecParameters->width;
pFrame->height = codecParameters->height;
pFrame->format = AV_PIX_FMT_YUV420P;
ret = av_frame_get_buffer(pFrame, 1);
if (ret < 0) {
printf("av_frame_get_buffer error\n");
return -1;
}
AVFrame *pFrameRGB = av_frame_alloc();
pFrameRGB->width = codecParameters->width;
pFrameRGB->height = codecParameters->height;
pFrameRGB->format = AV_PIX_FMT_RGB24;
ret = av_frame_get_buffer(pFrameRGB, 1);
if (ret < 0) {
printf("av_frame_get_buffer error\n");
return -1;
}
int picture_size = av_image_get_buffer_size(AV_PIX_FMT_YUV420P, codecParameters->width, codecParameters->height,
1);//计算这个格式的图片,需要多少字节来存储
uint8_t *out_buff = (uint8_t *) av_malloc(picture_size * sizeof(uint8_t));
av_image_fill_arrays(picture->data, picture->linesize, out_buff, AV_PIX_FMT_YUV420P, codecParameters->width,
codecParameters->height, 1);
//这个函数 是缓存转换格式,可以不用 以为上面已经设置了AV_PIX_FMT_YUV420P
SwsContext *img_convert_ctx = sws_getContext(codecParameters->width, codecParameters->height, AV_PIX_FMT_YUV420P,
codecParameters->width, codecParameters->height, AV_PIX_FMT_RGB24, 4,
NULL, NULL, NULL);
AVPacket *packet = (AVPacket *) av_malloc(sizeof(AVPacket));
auto startTime = steady_clock::now();
int counter = 0;
float fps = 0;
while (av_read_frame(pFormat, packet) >= 0) {
if (packet->stream_index == videoindex) {
ret = avcodec_send_packet(pCodecCtx, packet);
if (ret < 0) {
printf("avcodec_send_packet error\n");
continue;
}
av_packet_unref(packet);
int got_picture = avcodec_receive_frame(pCodecCtx, pFrame);
if (got_picture < 0) {
printf("avcodec_receive_frame error\n");
continue;
}
sws_scale(img_convert_ctx, pFrame->data, pFrame->linesize, 0,
codecParameters->height,
pFrameRGB->data, pFrameRGB->linesize);
cv::Mat mRGB(cv::Size(codecParameters->width, codecParameters->height), CV_8UC3);
mRGB.data = (unsigned char *) pFrameRGB->data[0];
cv::Mat mBGR;
cv::cvtColor(mRGB, mBGR, cv::COLOR_RGB2BGR);
counter++;
auto currentTime = steady_clock::now();
auto elapsed = duration_cast<duration<float>>(currentTime - startTime);
if (elapsed > seconds(1)) {
fps = counter / elapsed.count();
counter = 0;
startTime = currentTime;
}
std::stringstream fpsStr;
fpsStr << "NN fps: " << std::fixed << std::setprecision(2) << fps;
cv::putText(mBGR, fpsStr.str(), cv::Point(2, 20), cv::FONT_HERSHEY_TRIPLEX, 0.4, cv::Scalar(0,255,0));
cv::imshow("demo", mBGR);
cv::waitKey(1);
}
}
av_frame_free(&picture);
av_frame_free(&pFrame);
av_frame_free(&pFrameRGB);
avformat_free_context(pFormat);
return 0;
}
测试结果

2)修改第一版使用硬件解码h264然后显示,测试帧率
https://github.com/sxj731533730/h264_mpp_yuv
在rk3588 硬件测试mpp解码速度在200fps

测试结果

三、先以ffmpeg软解码去解析oak的视频帧,测试代码,以yolov7-tiny模型为例子
cmakelists.txt
cmake_minimum_required(VERSION 3.16)
project(depthai)
set(CMAKE_CXX_STANDARD 11)
find_package(OpenCV REQUIRED)
#message(STATUS ${OpenCV_INCLUDE_DIRS})
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(${CMAKE_SOURCE_DIR}/include)
include_directories(${CMAKE_SOURCE_DIR}/include/utility)
#链接Opencv库
find_package(depthai CONFIG REQUIRED)
add_executable(depthai main.cpp include/utility/utility.cpp)
target_link_libraries(depthai ${OpenCV_LIBS} depthai::opencv -lavformat -lavcodec -lswscale -lavutil -lz)
main.cpp
#include <stdio.h>
#include <string>
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
extern "C"
{
#include <libavformat/avformat.h>
#include <libavcodec/avcodec.h>
#include <libavutil/imgutils.h>
#include <libswscale/swscale.h>
}
#include "utility.hpp"
#include <vector>
#include "depthai/depthai.hpp"
static std::atomic<bool> newConfig{false};
using namespace std;
using namespace std::chrono;
using namespace cv;
typedef struct {
int width;
int height;
} YoloSize;
typedef struct {
std::string name;
int stride;
std::vector<YoloSize> anchors;
} YoloLayerData;
class BoxInfo {
public:
int x1, y1, x2, y2, label, id;
float score;
};
static inline float sigmoid(float x) {
return static_cast<float>(1.f / (1.f + exp(-x)));
}
double GetIOU(cv::Rect_<float> bb_test, cv::Rect_<float> bb_gt) {
float in = (bb_test & bb_gt).area();
float un = bb_test.area() + bb_gt.area() - in;
if (un < DBL_EPSILON)
return 0;
return (double) (in / un);
}
std::vector<BoxInfo> decode_infer(vector<float> data_pt, int stride, int net_size, int num_classes,
const std::vector<YoloSize> &anchors, float threshold, int idx) {
const int s[3] = {20, 40, 80};
std::vector<BoxInfo> result;
int batchs, channels, height, width, pred_item;
batchs = 1;
channels = 3;
height = s[idx];
width = s[idx];
pred_item = 6;
float data_ptr[batchs * channels * height * width * pred_item];
//std::cout << batchs * channels * height * width * pred_item << std::endl << data_pt.size() << std::endl;
for (int i = 0; i < data_pt.size(); i++) {
data_ptr[i] = data_pt[i];
}
for (int bi = 0; bi < batchs; bi++) {
auto batch_ptr = data_ptr + bi * (channels * height * width * pred_item);
for (int ci = 0; ci < channels; ci++) {
auto channel_ptr = batch_ptr + ci * (height * width * pred_item);
for (int hi = 0; hi < height; hi++) {
auto height_ptr = channel_ptr + hi * (width * pred_item);
for (int wi = 0; wi < width; wi++) {
auto width_ptr = height_ptr + wi * pred_item;
auto cls_ptr = width_ptr + 5;
auto confidence = sigmoid(width_ptr[4]);
for (int cls_id = 0; cls_id < num_classes; cls_id++) {
float score = sigmoid(cls_ptr[cls_id]) * confidence;
if (score > threshold) {
float cx = (sigmoid(width_ptr[0]) * 2.f - 0.5f + wi) * (float) stride;
float cy = (sigmoid(width_ptr[1]) * 2.f - 0.5f + hi) * (float) stride;
float w = pow(sigmoid(width_ptr[2]) * 2.f, 2) * anchors[ci].width;
float h = pow(sigmoid(width_ptr[3]) * 2.f, 2) * anchors[ci].height;
BoxInfo box;
box.x1 = std::max(0, std::min(net_size, int((cx - w / 2.f))));
box.y1 = std::max(0, std::min(net_size, int((cy - h / 2.f))));
box.x2 = std::max(0, std::min(net_size, int((cx + w / 2.f))));
box.y2 = std::max(0, std::min(net_size, int((cy + h / 2.f))));
box.score = score;
box.label = cls_id;
result.push_back(box);
}
}
}
}
}
}
return result;
}
void nms(std::vector<BoxInfo> &input_boxes, float NMS_THRESH) {
std::sort(input_boxes.begin(), input_boxes.end(), [](BoxInfo a, BoxInfo b) { return a.score > b.score; });
std::vector<float> vArea(input_boxes.size());
for (int i = 0; i < int(input_boxes.size()); ++i) {
vArea[i] = (input_boxes.at(i).x2 - input_boxes.at(i).x1 + 1)
* (input_boxes.at(i).y2 - input_boxes.at(i).y1 + 1);
}
for (int i = 0; i < int(input_boxes.size()); ++i) {
for (int j = i + 1; j < int(input_boxes.size());) {
float xx1 = std::max(input_boxes[i].x1, input_boxes[j].x1);
float yy1 = std::max(input_boxes[i].y1, input_boxes[j].y1);
float xx2 = std::min(input_boxes[i].x2, input_boxes[j].x2);
float yy2 = std::min(input_boxes[i].y2, input_boxes[j].y2);
float w = std::max(float(0), xx2 - xx1 + 1);
float h = std::max(float(0), yy2 - yy1 + 1);
float inter = w * h;
float ovr = inter / (vArea[i] + vArea[j] - inter);
if (ovr >= NMS_THRESH) {
input_boxes.erase(input_boxes.begin() + j);
vArea.erase(vArea.begin() + j);
} else {
j++;
}
}
}
}
void scale_coords(std::vector<BoxInfo> &boxes, int w_from, int h_from, int w_to, int h_to) {
float w_ratio = float(w_to) / float(w_from);
float h_ratio = float(h_to) / float(h_from);
for (auto &box: boxes) {
box.x1 *= w_ratio;
box.x2 *= w_ratio;
box.y1 *= h_ratio;
box.y2 *= h_ratio;
}
return;
}
cv::Mat draw_box(cv::Mat &cv_mat, std::vector<BoxInfo> &boxes, const std::vector<std::string> &labels,
unsigned char colors[][3]) {
for (auto box : boxes) {
int width = box.x2 - box.x1;
int height = box.y2 - box.y1;
cv::Point p = cv::Point(box.x1, box.y1);
cv::Rect rect = cv::Rect(box.x1, box.y1, width, height);
cv::rectangle(cv_mat, rect, cv::Scalar(colors[box.label][0], colors[box.label][1], colors[box.label][2]));
string text = labels[box.label] + ":" + std::to_string(box.score);
cv::putText(cv_mat, text, p, cv::FONT_HERSHEY_PLAIN, 1,
cv::Scalar(colors[box.label][0], colors[box.label][1], colors[box.label][2]));
}
return cv_mat;
}
int main(int argc, char **argv) {
std::vector<YoloLayerData> yolov7_layers{
{"324", 32, {{116, 90}, {156, 198}, {373, 326}}},
{"304", 16, {{30, 61}, {62, 45}, {59, 119}}},
{"output", 8, {{12, 16}, {16, 30}, {33, 23}}},
};
vector<float> origin_rect_cof;
std::vector<YoloLayerData> &layers = yolov7_layers;
float threshold = 0.4;
float nms_threshold = 0.5;
int i = 0;
std::vector<std::string> labels = {
"cup"
};
unsigned char colors[][3] = {
{0, 255, 0}
};
float target_width = 640;
float target_height = 640;
dai::Pipeline pipeline;
auto camRgb = pipeline.create<dai::node::ColorCamera>();
auto rgbOut = pipeline.create<dai::node::XLinkOut>();
rgbOut->setStreamName("rgbOut");
//camRgb->video.link(rgbOut->input);
camRgb->setPreviewSize(640, 640);
camRgb->setBoardSocket(dai::CameraBoardSocket::RGB);
camRgb->setResolution(dai::ColorCameraProperties::SensorResolution::THE_1080_P);
camRgb->setInterleaved(false);
camRgb->setColorOrder(dai::ColorCameraProperties::ColorOrder::RGB);
//camRgb->setFps(20);
camRgb->setPreviewKeepAspectRatio(false);
auto monoLeft = pipeline.create<dai::node::MonoCamera>();
auto monoRight = pipeline.create<dai::node::MonoCamera>();
auto stereo = pipeline.create<dai::node::StereoDepth>();
auto spatialDataCalculator = pipeline.create<dai::node::SpatialLocationCalculator>();
auto Encoder = pipeline.create<dai::node::VideoEncoder>();
Encoder->setDefaultProfilePreset(camRgb->getVideoSize(), camRgb->getFps(),
dai::VideoEncoderProperties::Profile::H265_MAIN);
//camRgb->video.link(Encoder->input);
//定义
//auto cam = pipeline.create<dai::node::XLinkIn>();
//camRgb->setStreamName("inFrame");
auto net = pipeline.create<dai::node::NeuralNetwork>();
dai::OpenVINO::Blob blob("../model_300_300/best_cup.blob");
net->setBlob(blob);
net->input.setBlocking(false);
//基本熟练明白oak的函数使用了
camRgb->preview.link(net->input);
camRgb->setFps(20);
//camRgb->setVideoSize(1920, 1080);
auto xoutDepth = pipeline.create<dai::node::XLinkOut>();
auto xoutSpatialData = pipeline.create<dai::node::XLinkOut>();
auto xinSpatialCalcConfig = pipeline.create<dai::node::XLinkIn>();
xoutDepth->setStreamName("depth");
xoutSpatialData->setStreamName("spatialData");
xinSpatialCalcConfig->setStreamName("spatialCalcConfig");
monoLeft->setResolution(dai::MonoCameraProperties::SensorResolution::THE_400_P);
monoLeft->setBoardSocket(dai::CameraBoardSocket::LEFT);
monoRight->setResolution(dai::MonoCameraProperties::SensorResolution::THE_400_P);
monoRight->setBoardSocket(dai::CameraBoardSocket::RIGHT);
stereo->setDefaultProfilePreset(dai::node::StereoDepth::PresetMode::HIGH_ACCURACY);
stereo->setLeftRightCheck(true);
stereo->setDepthAlign(dai::CameraBoardSocket::RGB);
stereo->setExtendedDisparity(true);
// LR-check is required for depth alignment
dai::Point2f topLeft(0.4f, 0.4f);
dai::Point2f bottomRight(0.6f, 0.6f);
dai::SpatialLocationCalculatorConfigData config;
config.depthThresholds.lowerThreshold = 100;
config.depthThresholds.upperThreshold = 10000;
config.roi = dai::Rect(topLeft, bottomRight);
spatialDataCalculator->inputConfig.setWaitForMessage(false);
spatialDataCalculator->initialConfig.addROI(config);
// Linking
monoLeft->out.link(stereo->left);
monoRight->out.link(stereo->right);
spatialDataCalculator->passthroughDepth.link(xoutDepth->input);
stereo->depth.link(spatialDataCalculator->inputDepth);
spatialDataCalculator->out.link(xoutSpatialData->input);
xinSpatialCalcConfig->out.link(spatialDataCalculator->inputConfig);
//定义输出
auto xlinkoutpreviewOut = pipeline.create<dai::node::XLinkOut>();
xlinkoutpreviewOut->setStreamName("out264");
Encoder->bitstream.link(xlinkoutpreviewOut->input);
//定义输出
auto xlinkParserOut = pipeline.create<dai::node::XLinkOut>();
xlinkParserOut->setStreamName("parseOut");
auto xlinkoutOut = pipeline.create<dai::node::XLinkOut>();
xlinkoutOut->setStreamName("out");
auto xlinkoutpassthroughOut = pipeline.create<dai::node::XLinkOut>();
xlinkoutpassthroughOut->setStreamName("passthrough");
net->out.link(xlinkParserOut->input);
net->passthrough.link(xlinkoutpassthroughOut->input);
auto manip = pipeline.create<dai::node::ImageManip>();
manip->initialConfig.setResize(target_width, target_height);
manip->initialConfig.setFrameType(dai::ImgFrame::Type::NV12);
camRgb->preview.link(manip->inputImage);
manip->out.link(Encoder->input);
//结构推送相机
dai::Device device(pipeline,true);
//取帧显示
// auto inqueue = device.getInputQueue("inFrame");//maxsize 代表缓冲数据
auto detqueue = device.getOutputQueue("parseOut", 8, false);//maxsize 代表缓冲数据
auto passthrough = device.getOutputQueue("passthrough", 8, false);//maxsize 代表缓冲数据
auto depthQueue = device.getOutputQueue("depth", 8, false);
auto spatialCalcQueue = device.getOutputQueue("spatialData", 8, false);
auto spatialCalcConfigInQueue = device.getInputQueue("spatialCalcConfig");
auto videoqueue = device.getOutputQueue("out264", camRgb->getFps(), false);
bool printOutputLayersOnce = true;
auto color = cv::Scalar(0, 255, 0);
auto startTime = steady_clock::now();
int counter = 0;
float fps = 0;
int width = target_width;
int height = target_height;
AVCodec *pCodec = avcodec_find_decoder(AV_CODEC_ID_H265);
AVCodecContext *pCodecCtx = avcodec_alloc_context3(pCodec);
int ret = avcodec_open2(pCodecCtx, pCodec, NULL);
if (ret < 0) {//打开解码器
char buf[1024] = {0};
av_strerror(ret, buf, sizeof(buf) - 1);
cerr << buf << endl;
return -1;
}
AVFrame *picture = av_frame_alloc();
picture->width = width;
picture->height = height;
picture->format = AV_PIX_FMT_YUV420P;
ret = av_frame_get_buffer(picture, 1);
if (ret < 0) {
char buf[1024] = {0};
av_strerror(ret, buf, sizeof(buf) - 1);
cerr << buf << endl;
return -1;
}
AVFrame *pFrame = av_frame_alloc();
pFrame->width = width;
pFrame->height = height;
pFrame->format = AV_PIX_FMT_YUV420P;
ret = av_frame_get_buffer(pFrame, 1);
if (ret < 0) {
char buf[1024] = {0};
av_strerror(ret, buf, sizeof(buf) - 1);
cerr << buf << endl;
return -1;
}
AVFrame *pFrameRGB = av_frame_alloc();
pFrameRGB->width = width;
pFrameRGB->height = height;
pFrameRGB->format = AV_PIX_FMT_RGB24;
ret = av_frame_get_buffer(pFrameRGB, 1);
if (ret < 0) {
char buf[1024] = {0};
av_strerror(ret, buf, sizeof(buf) - 1);
cerr << buf << endl;
return -1;
}
int picture_size = av_image_get_buffer_size(AV_PIX_FMT_YUV420P, width, height,
1);//计算这个格式的图片,需要多少字节来存储
uint8_t *out_buff = (uint8_t *) av_malloc(picture_size * sizeof(uint8_t));
av_image_fill_arrays(picture->data, picture->linesize, out_buff, AV_PIX_FMT_YUV420P, width,
height, 1);
//这个函数 是缓存转换格式,可以不用 以为上面已经设置了AV_PIX_FMT_YUV420P
SwsContext *img_convert_ctx = sws_getContext(width, height, AV_PIX_FMT_YUV420P,
width, height, AV_PIX_FMT_RGB24, 4,
NULL, NULL, NULL);
AVPacket *packet = av_packet_alloc();
// auto startTime = steady_clock::now();
// int counter = 0;
// float fps = 0;
while (true) {
auto inDepth = depthQueue->get<dai::ImgFrame>();
//auto ImgFrame = videoqueue->get<dai::ImgFrame>();
// auto ImgFrame = passthrough->get<dai::ImgFrame>();
//auto frame = ImgFrame->getCvFrame();
//printf("h264\n");
//videoFile.write((char *) (h265Packet->getData().data()), h265Packet->getData().size());
auto h264Packet = videoqueue->get<dai::ImgFrame>();
packet->data = (uint8_t *) h264Packet->getData().data(); //这里填入一个指向完整H264数据帧的指针
packet->size = h264Packet->getData().size(); //这个填入H265 数据帧的大小
packet->stream_index = 0;
cv::Mat frame;
ret = avcodec_send_packet(pCodecCtx, packet);
//printf("avcodec_send_packet ret=%d \n", ret);
if (ret < 0) {
char buf[1024] = {0};
av_strerror(ret, buf, sizeof(buf) - 1);
cerr << buf << endl;
continue;
}
av_packet_unref(packet);
while (ret >= 0) {
ret = avcodec_receive_frame(pCodecCtx, pFrame);
//printf("avcodec_receive_frame ret=%d \n", ret);
av_frame_is_writable(pFrame);
if (ret == AVERROR(EAGAIN) || ret == AVERROR_EOF || ret < 0) {
// if (ret < 0) {
// char buf[1024] = {0};
// av_strerror(ret, buf, sizeof(buf) - 1);
// cerr << buf << endl;
// continue;
// }
break;
}
sws_scale(img_convert_ctx, pFrame->data, pFrame->linesize, 0,
height,
pFrameRGB->data, pFrameRGB->linesize);
cv::Mat mRGB(cv::Size(width, height), CV_8UC3);
mRGB.data = (unsigned char *) pFrameRGB->data[0];
cv::Mat mBGR;
cv::cvtColor(mRGB, mBGR, cv::COLOR_RGB2BGR);
frame = mBGR;
}
if(frame.empty()){
continue;
}
target_height = frame.rows * 1.0;
target_width = frame.cols * 1.0;
cv::Mat depthFrameColor;
cv::Mat depthFrame = inDepth->getFrame(); // depthFrame values are in millimeters
cv::normalize(depthFrame, depthFrameColor, 255, 0, cv::NORM_INF, CV_8UC1);
cv::equalizeHist(depthFrameColor, depthFrameColor);
cv::applyColorMap(depthFrameColor, depthFrameColor, cv::COLORMAP_HOT);
auto inNN = detqueue->get<dai::NNData>();
if (printOutputLayersOnce && inNN) {
std::cout << "Output layer names: ";
for (const auto &ten : inNN->getAllLayerNames()) {
std::cout << ten << ", ";
}
printOutputLayersOnce = false;
}
std::vector<BoxInfo> result;
std::vector<BoxInfo> boxes;
auto output = inNN->getLayerFp16(inNN->getAllLayerNames()[2]);
boxes = decode_infer(output, layers[2].stride, 640, labels.size(), layers[2].anchors, threshold, 2);
result.insert(result.begin(), boxes.begin(), boxes.end());
auto output_534 = inNN->getLayerFp16(inNN->getAllLayerNames()[0]);
boxes = decode_infer(output_534, layers[1].stride, 640, labels.size(), layers[1].anchors, threshold, 1);
result.insert(result.begin(), boxes.begin(), boxes.end());
auto output_554 = inNN->getLayerFp16(inNN->getAllLayerNames()[1]);
boxes = decode_infer(output_554, layers[0].stride, 640, labels.size(), layers[0].anchors, threshold, 0);
result.insert(result.begin(), boxes.begin(), boxes.end());
nms(result, nms_threshold);
scale_coords(result, 640, 640, frame.cols, frame.rows);
cv::Mat frame_show = draw_box(frame, result, labels, colors);
counter++;
auto currentTime = steady_clock::now();
auto elapsed = duration_cast<duration<float>>(currentTime - startTime);
if (elapsed > seconds(1)) {
fps = counter / elapsed.count();
counter = 0;
startTime = currentTime;
}
std::stringstream fpsStr;
fpsStr << "NN fps: " << std::fixed << std::setprecision(2) << fps;
printf("fps %f\n", fps);
cv::putText(frame, fpsStr.str(), cv::Point(2, frame_show.rows - 4), cv::FONT_HERSHEY_TRIPLEX, 0.4,
cv::Scalar(0, 255, 0));
for (auto &item:result) {
topLeft.x = item.x1 * depthFrameColor.cols / target_width / depthFrameColor.cols;
topLeft.y = item.y1 * depthFrameColor.rows / target_height / depthFrame.rows;
bottomRight.x = (item.x2 * depthFrameColor.cols / target_width) / depthFrameColor.cols;
bottomRight.y = (item.y2 * depthFrameColor.rows / target_height) / depthFrameColor.rows;
//std::cout<<topLeft.x<<" "<<topLeft.y<<" "<<bottomRight.x<<" "<<bottomRight.y<<" "<<std::endl;
config.roi = dai::Rect(topLeft, bottomRight);
dai::SpatialLocationCalculatorConfig cfg;
cfg.addROI(config);
spatialCalcConfigInQueue->send(cfg);
auto spatialData = spatialCalcQueue->get<dai::SpatialLocationCalculatorData>()->getSpatialLocations();
for (auto depthData : spatialData) {
auto roi = depthData.config.roi;
roi = roi.denormalize(depthFrameColor.cols, depthFrameColor.rows);
auto xmin = (int) roi.topLeft().x;
auto ymin = (int) roi.topLeft().y;
auto xmax = (int) roi.bottomRight().x;
auto ymax = (int) roi.bottomRight().y;
auto depthMin = depthData.depthMin;
auto depthMax = depthData.depthMax;
auto coords = depthData.spatialCoordinates;
auto distance = std::sqrt(coords.x * coords.x + coords.y * coords.y + coords.z * coords.z);
auto fontType = cv::FONT_HERSHEY_TRIPLEX;
std::stringstream depthDistance;
depthDistance.precision(2);
depthDistance << fixed << static_cast<float>(distance / 1000.0f) << "m";
cv::putText(depthFrameColor, depthDistance.str(), cv::Point(item.x1 + 10, item.y1 + 70), fontType, 0.5,
color);
std::stringstream rgbDistance;
rgbDistance.precision(2);
rgbDistance << fixed << static_cast<float>(distance / 1000.0f) << "m";
cv::putText(frame, rgbDistance.str(), cv::Point(item.x1 + 10, item.y1 + 70), fontType, 0.5, color);
cv::rectangle(frame, cv::Rect(cv::Point(item.x1, item.y1), cv::Point(item.x2, item.y2)), color,
cv::FONT_HERSHEY_SIMPLEX);
std::stringstream rgb_depthX, depthX;
rgb_depthX << "X: " << (int) depthData.spatialCoordinates.x << " mm";
cv::putText(frame, rgb_depthX.str(), cv::Point(item.x1 + 10, item.y1 + 20), cv::FONT_HERSHEY_TRIPLEX,
0.5, color);
std::stringstream rgb_depthY, depthY;
rgb_depthY << "Y: " << (int) depthData.spatialCoordinates.y << " mm";
cv::putText(frame, rgb_depthY.str(), cv::Point(item.x1 + 10, item.y1 + 35), cv::FONT_HERSHEY_TRIPLEX,
0.5, color);
std::stringstream rgb_depthZ, depthZ;
rgb_depthZ << "Z: " << (int) depthData.spatialCoordinates.z << " mm";
cv::putText(frame, rgb_depthZ.str(), cv::Point(item.x1 + 10, item.y1 + 50), cv::FONT_HERSHEY_TRIPLEX,
0.5, color);
cv::rectangle(depthFrameColor, cv::Rect(cv::Point(xmin, ymin), cv::Point(xmax, ymax)), color,
cv::FONT_HERSHEY_SIMPLEX);
depthX << "X: " << (int) depthData.spatialCoordinates.x << " mm";
cv::putText(depthFrameColor, depthX.str(), cv::Point(xmin + 10, ymin + 20), cv::FONT_HERSHEY_TRIPLEX,
0.5, color);
depthY << "Y: " << (int) depthData.spatialCoordinates.y << " mm";
cv::putText(depthFrameColor, depthY.str(), cv::Point(xmin + 10, ymin + 35), cv::FONT_HERSHEY_TRIPLEX,
0.5, color);
depthZ << "Z: " << (int) depthData.spatialCoordinates.z << " mm";
cv::putText(depthFrameColor, depthZ.str(), cv::Point(xmin + 10, ymin + 50), cv::FONT_HERSHEY_TRIPLEX,
0.5, color);
}
// Show the frame
}
//cv::imshow("depth", depthFrameColor);
//cv::imshow("demo", frame_show);
//int key = cv::waitKey(1);
//if (key == 'q' || key == 'Q') return 0;
}
return 0;
}
这里使用rk3588和oak相结合,存在两个问题,多个usb电流都在1a内,只有一个type-c转usb的电流在2a内,oak的基础电流要求900ma,峰值电流要求在1.5a左右,这就限制了oak的目标检测和推理数据传输,所以需要使用编码方式压缩数据量传输,即使使用usb的线进行数据传输,这个实验使用usb3.0的接口,但是由于电流无法满足要求,只能让oak限制使用2.0的速率dai::Device device(pipeline,true);使用设置帧率20fps进行目标检测,帧率过高容易导致失真,且使用压缩比h264还高效的1/2进行压缩数据量进行传输,在rk3588测试数据
/home/firefly/Downloads/cmake-build-debug/depthai
[2023-02-03 00:38:03.204] [warning] VideoEncoder setDefaultProfilePreset: passing 'width'/ 'height' is deprecated. The size is auto-determined from first frame
[194430101139FA1200] [7.1.1] [1.595] [NeuralNetwork(7)] [warning] Network compiled for 4 shaves, maximum available 12, compiling for 6 shaves likely will yield in better performance
[swscaler @ 0x5592956f50] No accelerated colorspace conversion found from yuv420p to rgb24.
[hevc_rkmpp @ 0x5593179e90] Decoder noticed an info change (640x640), format=0
rga_api version 1.8.1_[4]
Output layer names: 304, 324, output, fps 0.989732
fps 0.989732
fps 0.989732
fps 2.422750
fps 2.422750
fps 2.422750
fps 2.422750
pc测试数据 11th Gen Intel® Core™ i5-11260H @ 2.60GHz × 12 Ubuntu 20.04.4 LTS 64-bit Mesa Intel® UHD Graphics (TGL GT1) / Mesa Intel® UHD Graphics (TGL GT1),去掉帧率限制和usb2.0的接口限制
/home/ubuntu/nanodet/oak_detect_head/cmake-build-debug/depthai
[2023-02-03 08:51:03.664] [warning] VideoEncoder setDefaultProfilePreset: passing 'width'/ 'height' is deprecated. The size is auto-determined from first frame
[19443010F1F6F51200] [3.1] [37.694] [NeuralNetwork(7)] [warning] Network compiled for 4 shaves, maximum available 12, compiling for 6 shaves likely will yield in better performance
Output layer names: 304, 324, output, fps 0.000000
fps 1.764677
fps 6.032386
fps 6.032386
fps 6.032386
fps 6.032386
fps 6.032386
fps 6.032386
fps 6.032386
fps 6.255304
fps 6.255304
2)以mpp硬解码去解析oak的视频帧,修改官方的demo代码,先执行
firefly@firefly:~$ sudo cp -r /usr/include/libdrm/* /usr/include/
这里提供提供一个单纯的使用mpp解码的oak的编码产生的h264数据https://github.com/sxj731533730/oak_mpp_show.git,真的很快42FPS
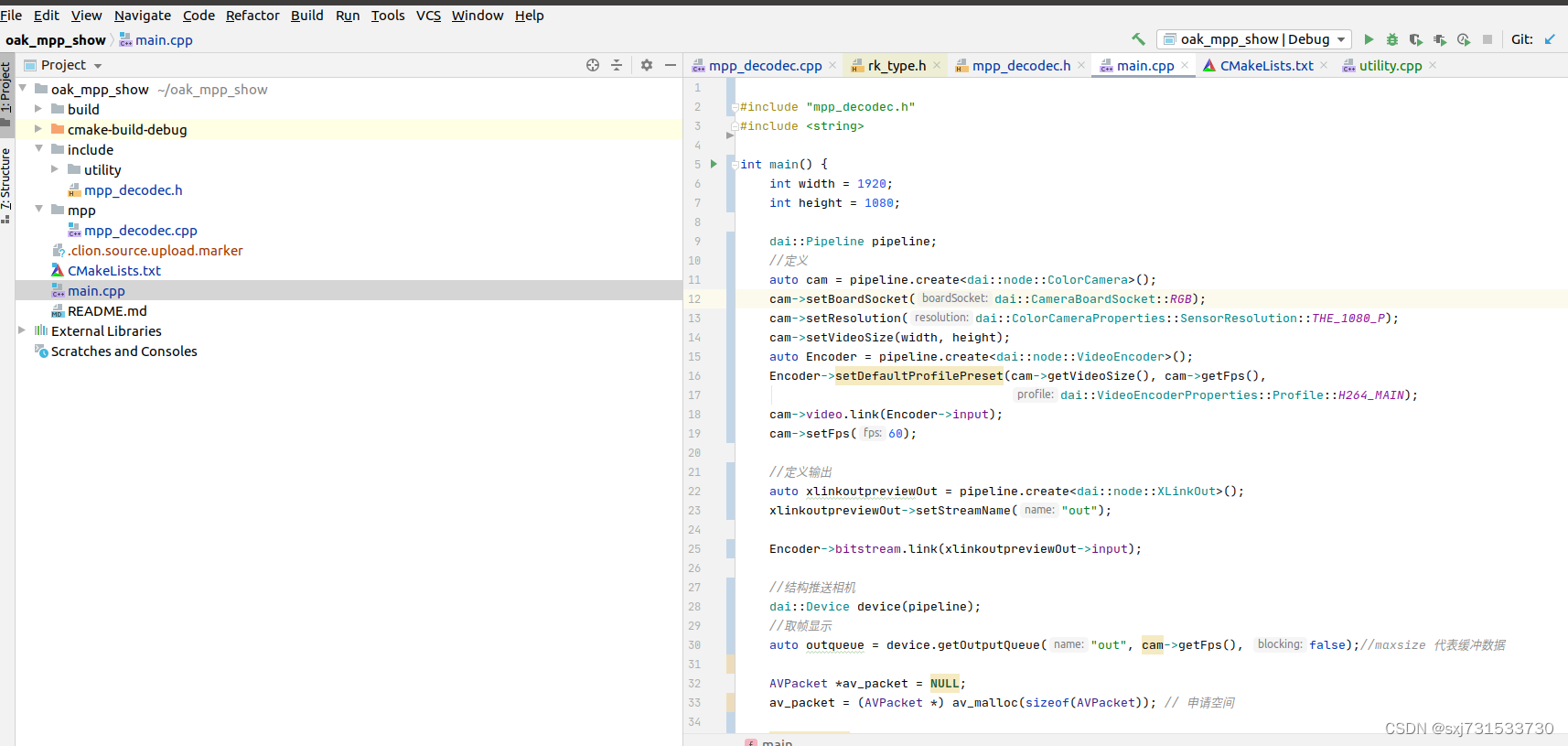
测试结果

这就很强了,在开发板的电压和oak峰值限制条件下,使用编码方式降低数据传输量,又用rk的mpp硬件解码加速处理数据,yyds (这里以本地写图片cv.imwrite测试结果,cv.show显示画面好像掉帧率),进一步修正代码,提速检测
3)修改上述代码使用yolov7-tiny的oak编码-mpp硬件解码-写图片本地,也还是不太快在12fps,看样子限制条件在于oak模型推理速度(模型推理太慢了oak vpu)

参考
Welcome to Core-3588J Manual — Firefly Wiki
Firefly-Linux / ff_media · GitLab
https://github.com/yijiesun/mpp_drm_rga_demo
- 软件开发相关 — Firefly Wiki
版权归原作者 sxj731533730 所有, 如有侵权,请联系我们删除。