
1.Tusimple数据集
特点:位于高速路,天气晴朗,车道线清晰,特点是车道线以点来标注。(ground_truth:json格式) (提供带有实例级车道注释的大规模图像数据。 但是不适用于视频实例车道检测。)
1、车道线实际上不只是道路上的标线,虚线被当作了一种实线做处理的。这里面双实线、白线、黄线这类信息也是没有被标注的。
2、每条线实际上是点序列的坐标集合,而不是区域集合
主要采集区域国外高速公路上(安装在卡车的靠近车牌的位置),图像未畸变
中等天气条件,白天不同的时间 - 2车道/3车道/4车道/或更多 - 不同的交通状况,每张图都提供了该图前19帧图像(不过这19帧是未标注的)车道线未分类,(拍摄角度应该在车外),GT是以json格式,点形式标注。1s抽取20帧。拍摄角度方向与汽车行驶方向很接近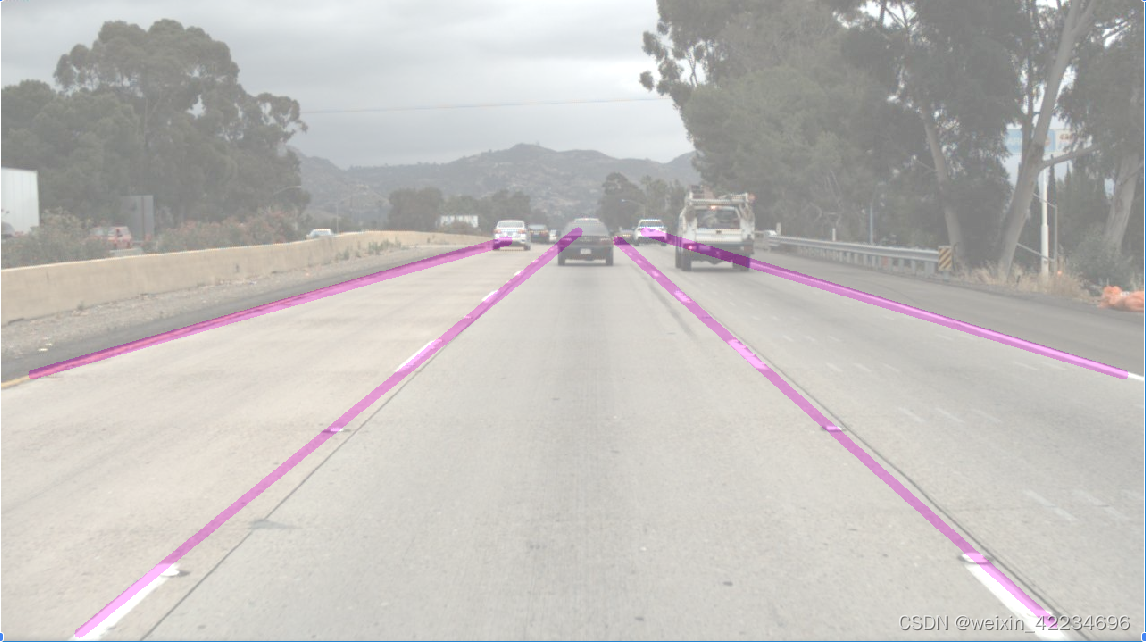

图片大小:1280x720,图片数量:6408 (数量:train:3626 ;test:2782)
下载地址:https://github.com/TuSimple/tusimple-benchmark/issues/3 (官方),https://github.com/TuSimple/tusimple-benchmark/tree/master/doc/lane_detection
百度网盘链接:https://pan.baidu.com/s/1i1IUxYI48tP5y-p2t-sVOA?pwd=1wy0 提取码:1wy0 (非官方)
样本处理:https://blog.csdn.net/qingfengxd1/article/details/108738651
评估指标:https://github.com/TuSimple/tusimple-benchmark/blob/master/evaluate/lane.py
2.CULane数据集
特点:包含拥挤,黑夜,无线,暗影等八种难以检测的情况, 最多标记4条车道线。该数据集是由不同驾驶员操控的六辆不同的轿车所安装的摄像头采集的,道路所在地为北京市。该数据集采集了超过55小时的视频数据,提取了133235帧图像。
数据样本如以下图一所示。其中测试集划分成了普通和其余8种具有挑战性的种类(场景不同而已)。
对于车道标线被车辆遮挡或不可见的情况,我们仍然根据上下文注释车道,我们还希望算法能够区分道路上的障碍物。(提供带有实例级车道注释的大规模图像数据。 但是不适用于视频实例车道检测。)
北京城区道路和高速公路拍摄地点,车内前置摄像头无明显畸变矫正痕迹,车道标注的就是当前车道和左右两车道(最多),不区分虚实线,以点的形式标注(txt)。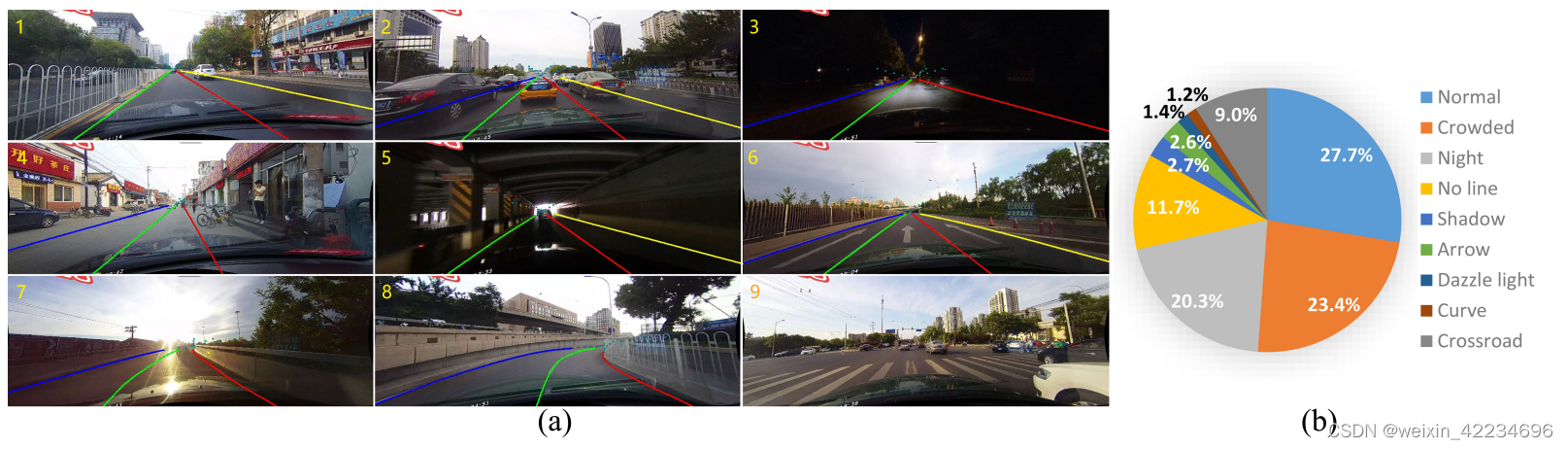

图片大小:1640x590,图片数量:133235 (88880张图像划分为训练集,9675张图像划分为验证集,以及34680张图像划分为测试集。)
下载地址:https://xingangpan.github.io/projects/CULane.html(官方)
样本处理:https://blog.csdn.net/weixin_43726913/article/details/115330065
评估指标:https://github.com/ZJULearning/resa
3.BDD100k数据集
特点:伯克利大学推出的一个非常全面的数据集,也包含车道线。包含美国4个区的白天、黑夜各种天气状况,二维8类别车道线。(不提供车道实例的注释——在每一帧上,同一类型的多个车道没有分开并使用一个标签进行注释。)路缘石, 人行横道, 双白, 双黄, 双其他颜色, 单白, 单黄, 单其他颜色8个主要类别。这些视频分别是从美国不同的地方收集的,如上图所示,该数据库,涵盖了不同的天气状况,包含晴天、阴天和雨天以及在白天和夜天的不同时间。轿车前置摄像头,所见即所得,城市道路和高速公路。
近日,伯克利AI实验室发表了CV领域到目前为止规模最大、最多样化的开源视频数据集–BDD100K数据集。该数据集由100000个视频组成,每个视频大约40秒,720P,30fps,总时间超过1,100小时。BDD100K数据集在每个视频的第10秒抽取关键帧,并做了标注
车道标记对驾驶员来说是重要的道路指示。当GPS或地图没有精确的全球覆盖范围时,它们也是自动驾驶系统驾驶方向和定位的关键线索。根据车道标记对车道内车辆的指示,数据集将其分为两种类型。垂直车道标记(下图中用红色标记)表示沿其车道行驶方向的标记。平行车道标记(下图中用蓝色标记)表示车道内车辆停止的标志。我们还为标记提供了属性,如实线与虚线、双线与单线。标签形式像素级别的标注mask
图片大小:1280x720,图片数量:10w
下载地址:https://bdd-data.berkeley.edu/(官方)
链接: https://pan.baidu.com/s/1ue7RuAitqKUTSAAHNPpkFg 提取码: cdiy (非官方)
BDD100K的mini版本 链接:https://pan.baidu.com/s/1r7FbMX2_OcDKsfrhujSfAQ 提取码:yc90
当前数据集中的流行模型:https://github.com/SysCV/bdd100k-models/
数据处理:https://github.com/cardwing/Codes-for-Lane-Detection/tree/master/ENet-BDD100K-Torch
paper:BDD100K: A Diverse Driving Dataset for Heterogeneous Multitask Learning
评估指标:
4.ApolloScape数据集
特点:这个大规模的数据集包含一组不同的立体视频序列,这些序列记录在来自不同城市的街景中,具有 110 000 多帧的高质量像素级注释。(不提供车道实例的注释——在每一帧上,同一类型的多个车道没有分开并使用一个标签进行注释。)所见即所得,像素级别的标注mask
包含了35个车道标记类别(可合并),其中车道类别10种,主要是国内的城市道路,摄像头位于车身上面。用途:高精地图构建或更新过程。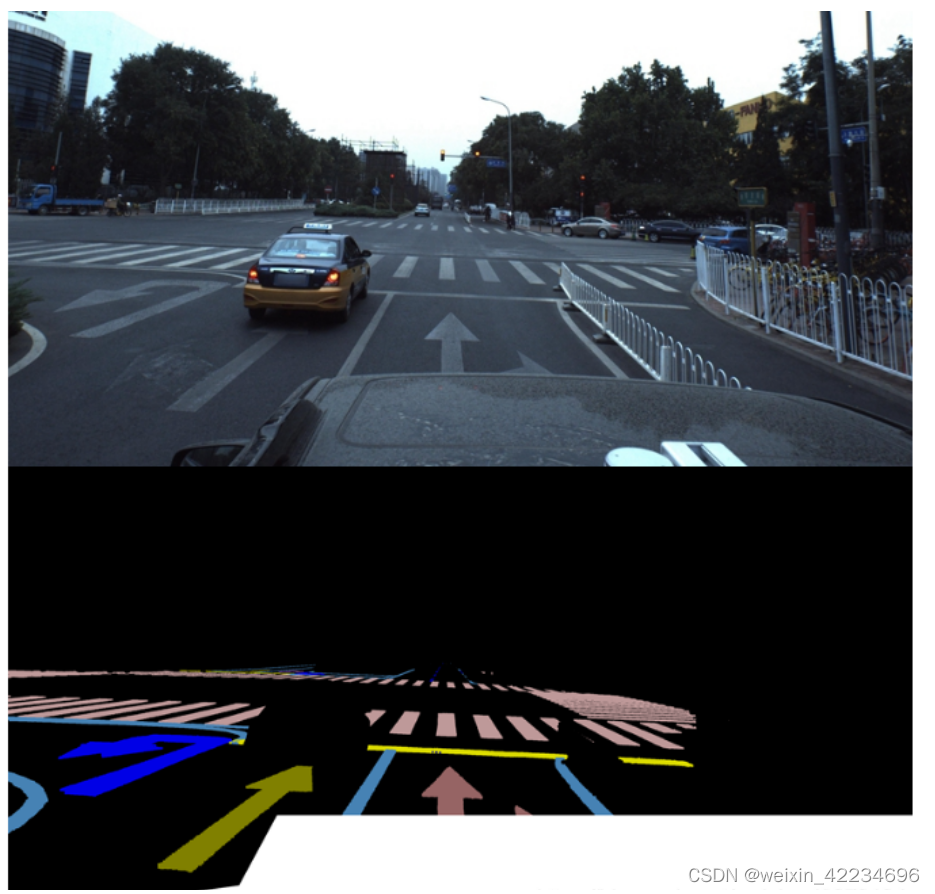
图片大小:3384x2710,图片数量:200k(113653)
下载地址:http://apolloscape.auto/lane_segmentation.html(官方),https://github.com/ApolloScapeAuto/dataset-api/blob/master/lane_segmentation/LanemarkDiscription.pdf(介绍)
评估指标:http://apolloscape.auto/lane_segmentation.html#to_evaluation_href
5.CurveLanes数据集
特点:华为弯道检测数据集,训练集10万张,验证集2万张,测试级3万张(测试集没有提供标签)。道路弯曲度高,标签以点形式json格式,相对BDD ,Tusimple,culane有更多的车道。车道类别不区分。摄像头车内部前置摄像头拍摄。
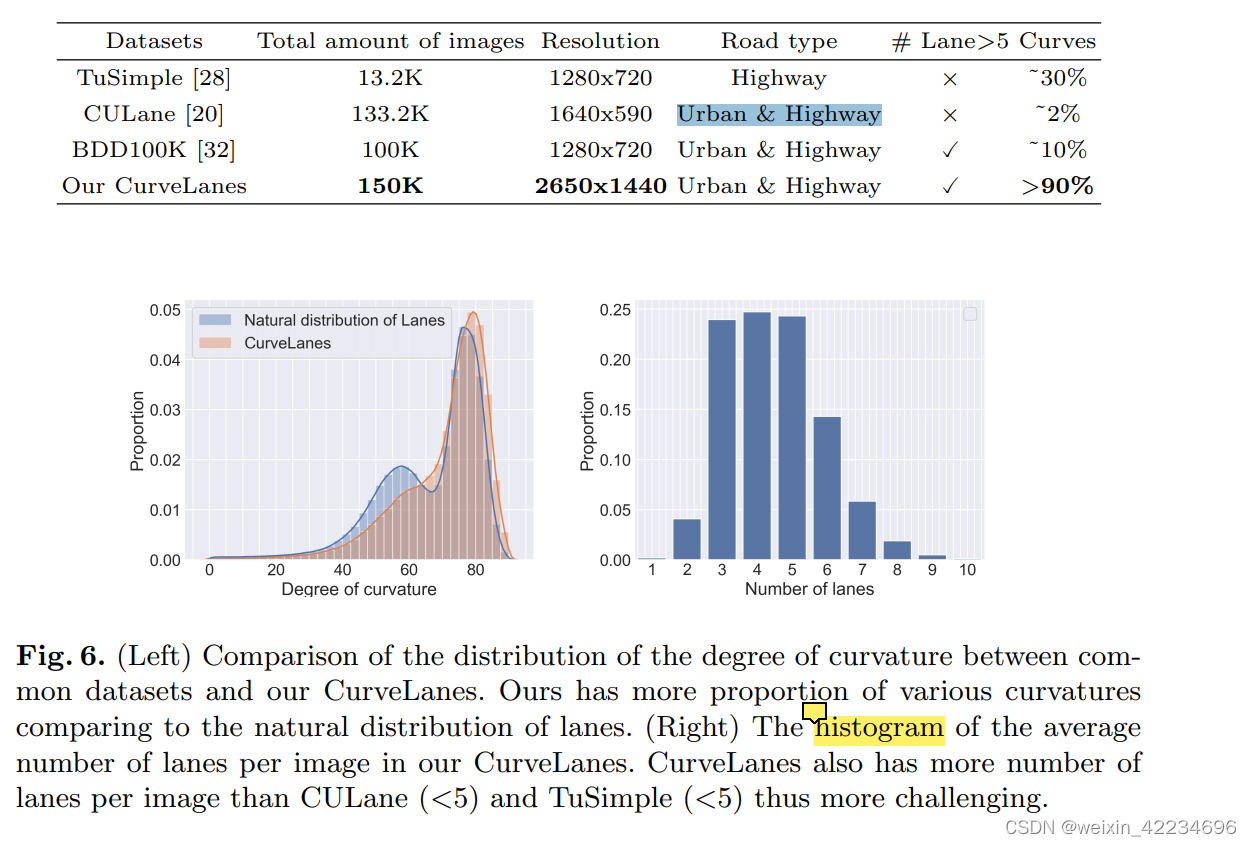
图片大小:2650x1440,图片数量:15w
下载地址:https://github.com/SoulmateB/CurveLanes
数据处理:https://github.com/pandamax/Parse_Curvelanes
评估指标:To be provided.
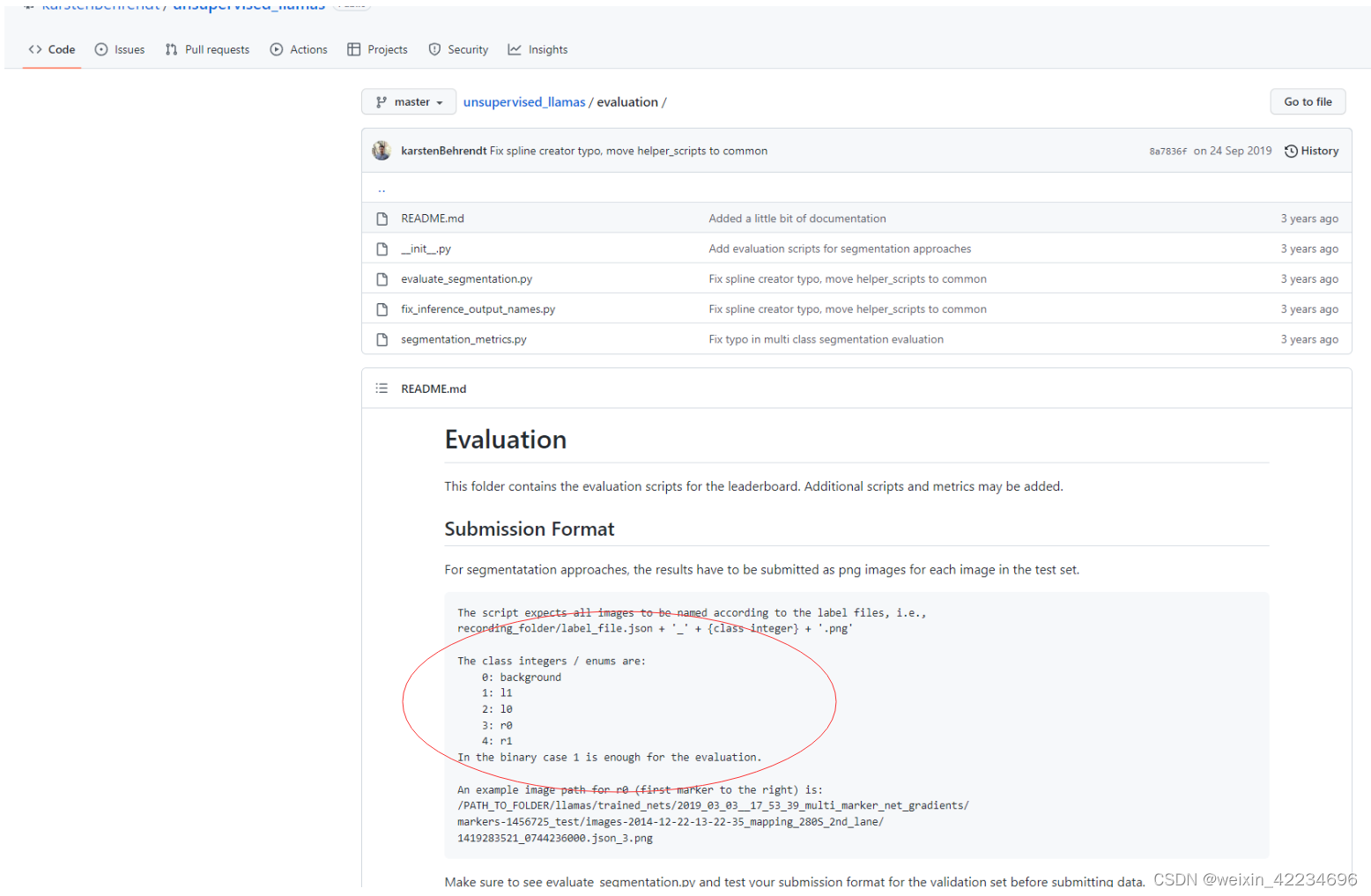
6.LLAMAS数据集
特点:使用了 14 条高速公路记录,每条大约 25 公里
收集传感器数据以在我们的数据集中标记图像。国外高速。博世公司车道标记数据集,标注不是人工标注,而是高精地图生成的,全是高速场景。超过100米的注释,摄像头大致位于汽车外部的车牌处。彩色图额外提供了原图的灰度图,总共4类,标签以点json格式(三维坐标),左虚车道线,右虚车道线,左实车道线,右实车道线

图片大小:1276 x 717,图片数量: 79113 (训练集:58269 验证集:20844 测试集:20929(无标签))
下载地址:https://unsupervised-llamas.com/llamas/login/?next=/llamas/download(需注册)
评估指标:https://github.com/karstenBehrendt/unsupervised_llamas/tree/master/evaluation
7. VPGNet 数据集
特点:包含白天(非雨天、雨天、大雨天)、夜晚的数据,同时包含了各种车道线类型,三周驾驶,以及其他不同类型的车道标识(左转箭头、直行箭头、斑马线等)。21097张韩国首尔的道路图像,标签以及原图格式:mat,总共17种类别(8种车道类别,9种道路标记类别)手动标注车道和道路的拐角点。角点连接起来形成一个多边形形成每个对象的像素级掩码注释。数据集是在恶劣的天气条件下捕获的,在车内(中间)安装了一个摄像头。首尔市中心拍摄城市交通场景,摄像头可能拍到雨刮器
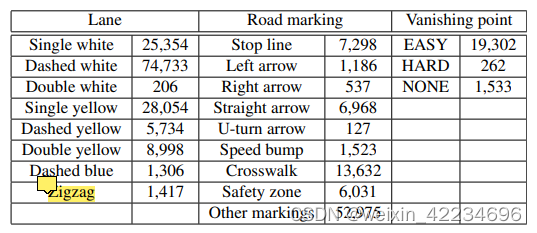

图片大小:1288×728,图片数量:20k
下载地址:If you would like to download the VPGNet dataset, please fill out a survey. We will send you an e-mail with a download link.(需要填写调查问卷)
数据处理:https://blog.csdn.net/weixin_42840360/article/details/116995504
paper地址:VPGNet: Vanishing Point Guided Network for Lane and Road Marking Detection and Recognition
model地址:https://github.com/SeokjuLee/VPGNet
评估指标:https://github.com/SeokjuLee/VPGNet
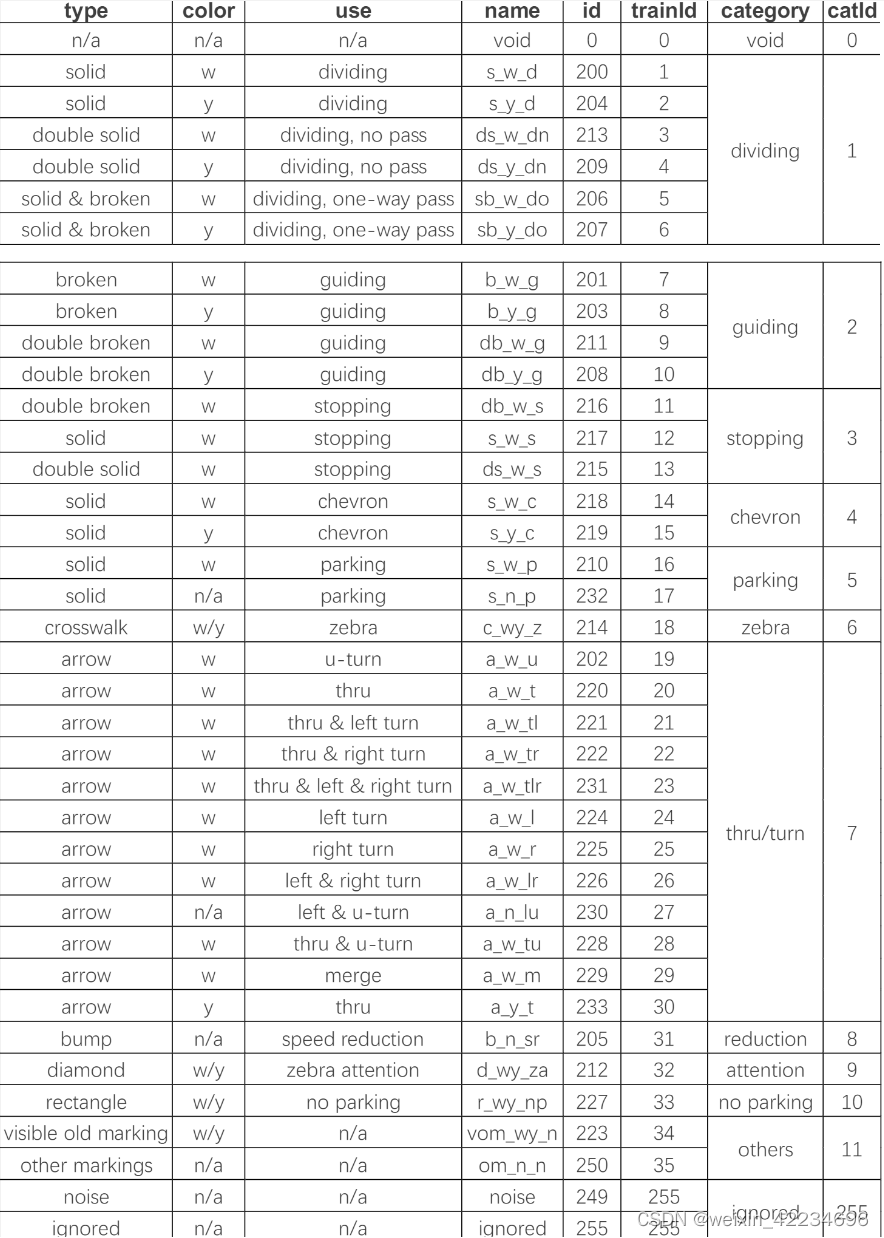
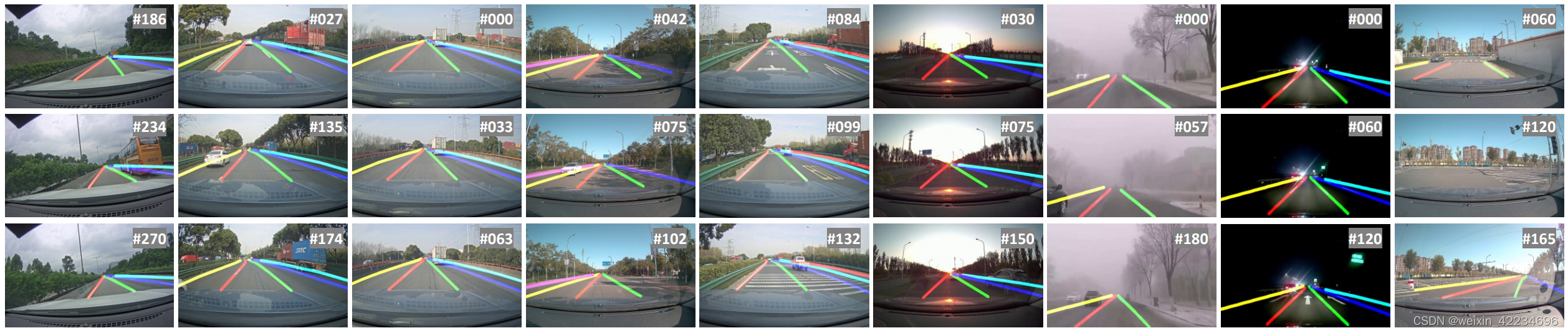
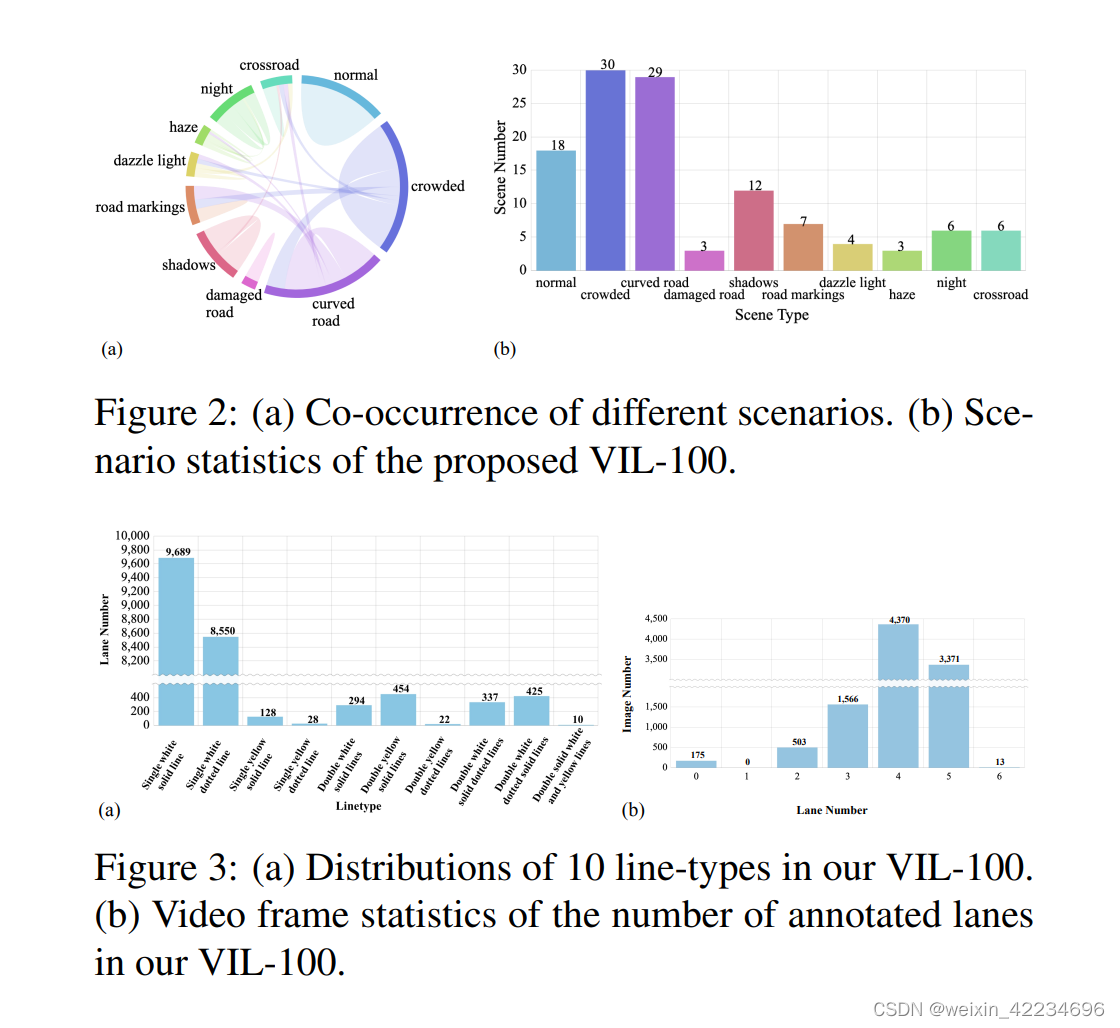
8.VIL-100数据集
特点:它包含100个视频,具有10,000帧图像,涵盖拥挤路况、车道线破损、雾霾、夜晚等10类经典场景。我们将所有视频的帧率从最初的30fps下采样到10fps,对每帧中的所有车道线提供了实例级标注。 标签json,mask均提供,考虑数据中的 10 个典型场景集合:正常、拥挤、弯路、破损路、阴影,道路标记,炫光,阴霾,夜晚,十字路口。在这100个视频中,97个是由安装在后视镜附近的单目前置摄像头采集的。剩下的3个视频是从互联网收集的。总共有10个类别的车道线,(单白实心、单白虚线、单黄实心、单黄虚线、双白实心、双黄实心、双黄虚线、双白实心虚线、双白虚线实线、双实白黄。)single whitesolid, single white dotted, single yellow solid, single yellowdotted, double white solid, double yellow solid, double yellow dotted, double white solid dotted, double white dottedsolid, double solid white and yellow。对于每个视频,放置一系列定位点沿每帧中每个车道的中心线并存储
它们在 json 格式的文件中。 沿每条车道的点被存储在一组中,它提供实例级注释。 然后我们将每组点拟合成一条曲线
通过三阶多项式,并将其扩展为车道区域具有一定的宽度。 根据经验,在 1,920 × 1,080 帧上,选择宽度为 30 像素。 对于低分辨率
框架,宽度按比例减小。
图片大小:1920 × 1080,图片数量:10k
下载地址: https://pan.baidu.com/s/1hFPKt4az6AiMmsV4c9Odmg - yyl7(官方)
paper地址:VIL-100: A New Dataset and A Baseline Model for Video Instance Lane Detection
model地址:https://github.com/yujun0-0/MMA-Net
评估指标:https://github.com/yujun0-0/MMA-Net/tree/main/evaluation
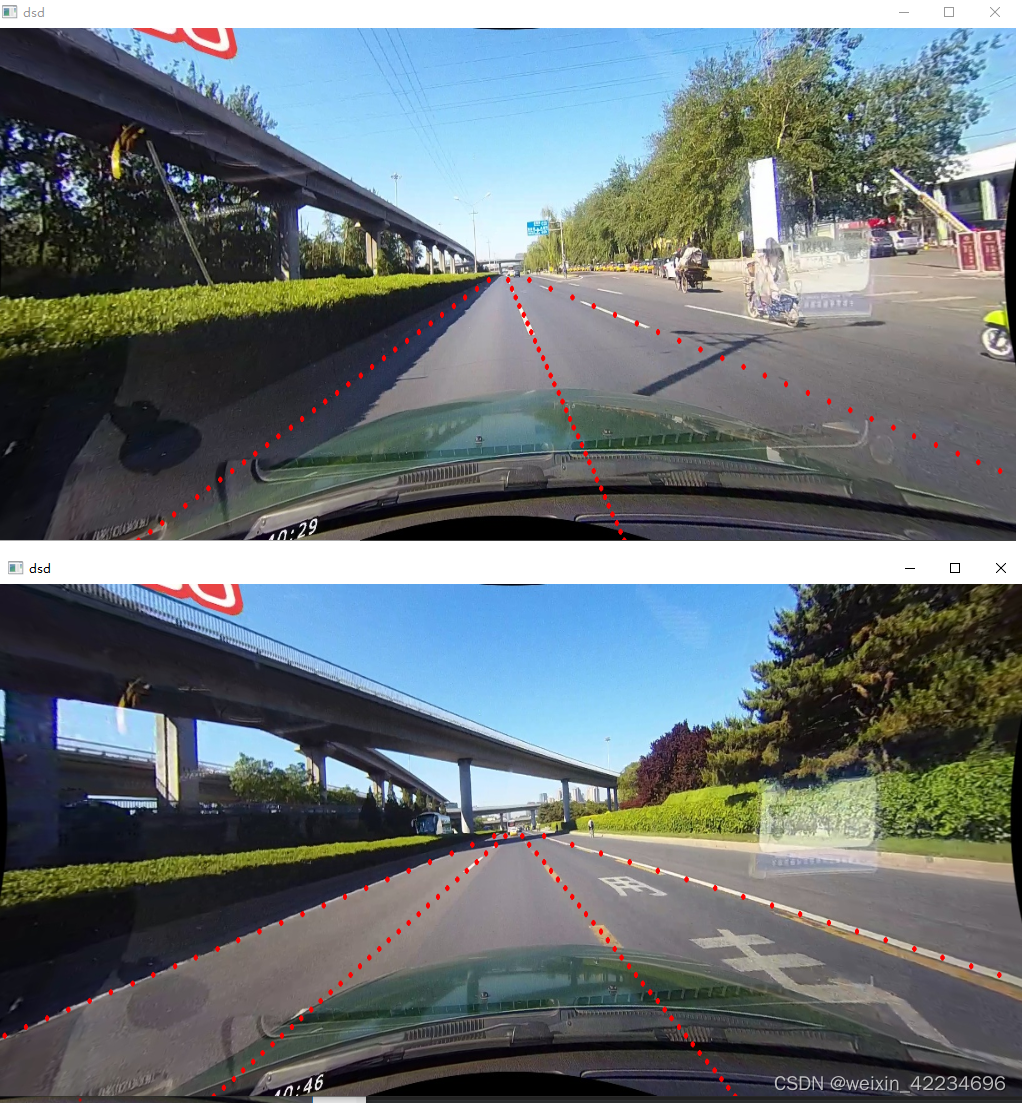
9.Jiqing Expressway数据集
特点:该数据集是一个多车道检测数据集,可用于测试和评估多车道检测算法。数据集中有40个视频片段,每个视频片段持续3分钟,帧速率为30 fps,不同照明强度和不同路况(上游、下坡、隧道、涵洞、坡道等)的道路图像。行车记录仪类似拍摄角度 ,高速国内,对于阴影或车辆遮挡的车道,没有标记或只有部分标记(仅少数情况)。 此外,数据集只标注了道路交通方向的车道线,不包括反向车道。 此外,匝道部分的车道注释可能并不完美。车道不分类别,标签以txt点格式标注,原图视频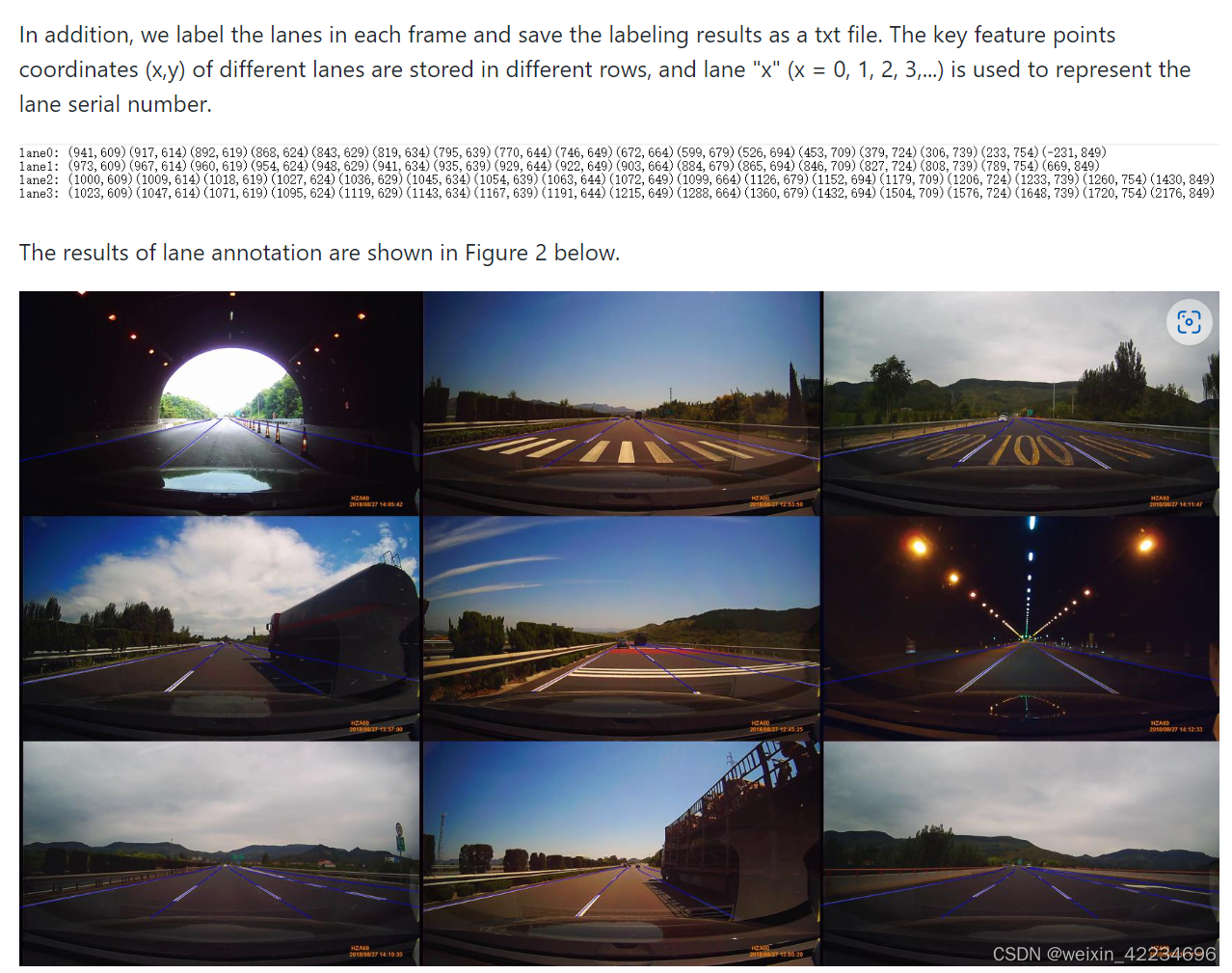
图片大小:1920×1080,图片数量:210610
下载地址:https://github.com/vonsj0210/Multi-Lane-Detection-Dataset-with-Ground-Truth
评估指标:https://github.com/vonsj0210/Multi-Lane-Detection-Dataset-with-Ground-Truth
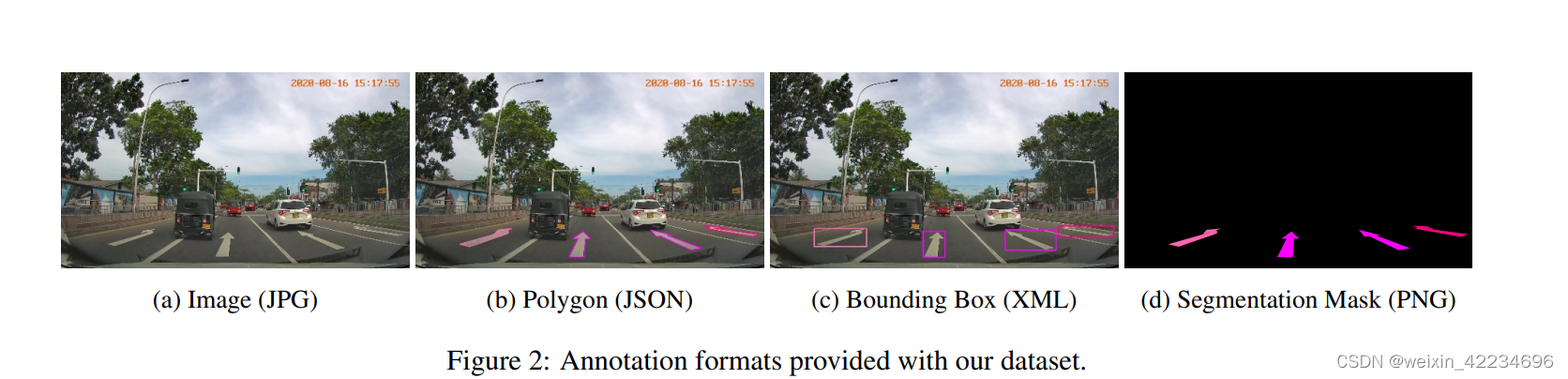
10. Ceymo数据集
特点:使用 labelme注释工具将属于 11 个类别的道路标记手动注释为多边形。每个图像都有一个 JSON 文件,其中包含包含存在的道路标记的多边形的坐标
在那个图像中。 除了多边形注释JSON 格式,我们还提供了边界框注解XML 格式以及像素级分割掩码PNG格式,以方便不同的道路标记检测方法。国外拍摄;行车记录仪
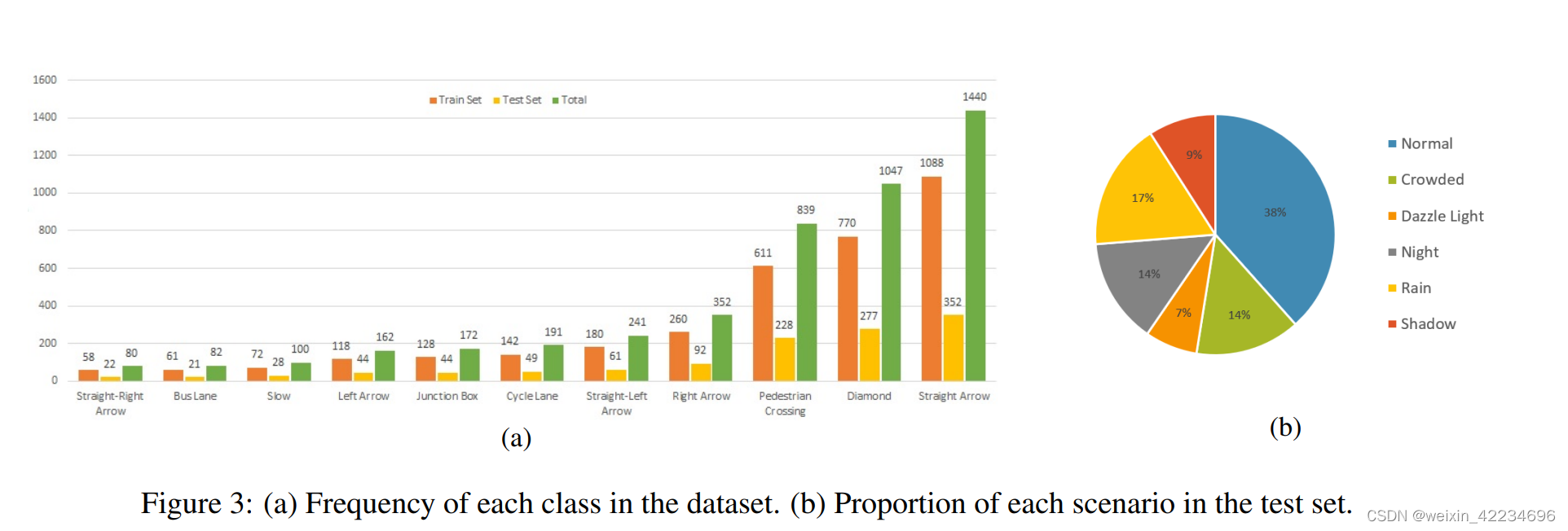
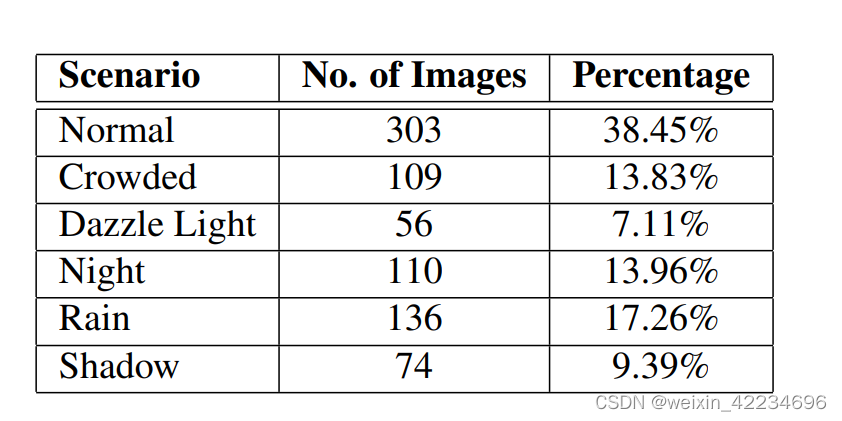
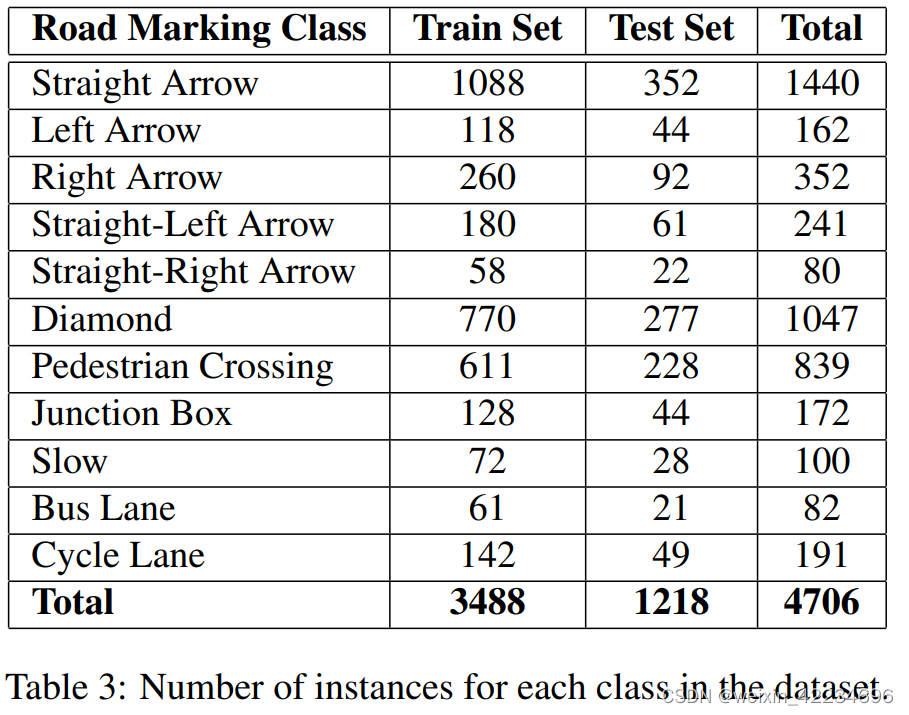
图片大小:1920 × 1080,图片数量: 2887,train set :2099, test set: 788 images
下载地址:https://github.com/oshadajay/CeyMo
paper地址:CeyMo: See More on Roads – A Novel Benchmark Dataset for Road Marking Detection
评估指标:https://github.com/oshadajay/CeyMo
11. SDLane Dataset数据集
特点:SDLane数据集是一种用于自动驾驶的新型车道标记数据集。我们提供1920 x 1208像素的高分辨率图像,捕捉高速公路和城市地区的挑战场景。该数据集由39K训练图像和4K测试图像组成,具有精确的地面真值标签。对于每个场景,我们手动注释道路上所有可见车道标记的2D车道几何体。此外,为了更好地推断ego车辆的位置,我们注释了每个车道相对于最左侧车道标记的索引。车外摄像头,韩国。标签json格式,点形式,车道线不分类别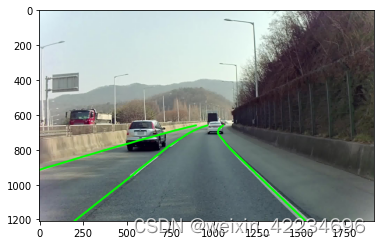
图片大小:1920 x 1208,图片数量:43k
下载地址:https://www.42dot.ai/akit/dataset
评估指标:https://www.42dot.ai/akit/dataset
对比总结:其中TuSimple挑战性低,场景多为高速公路,新论文喜欢用它来验证可行性。与之相比CULane场景复杂,很多位于北京城区,难度较高。目前,我看到的最新的学术论文里,大都是用的 TuSimple 和 CULane 两个数据集进行性能对比,也有文章使用 LLAMAS。
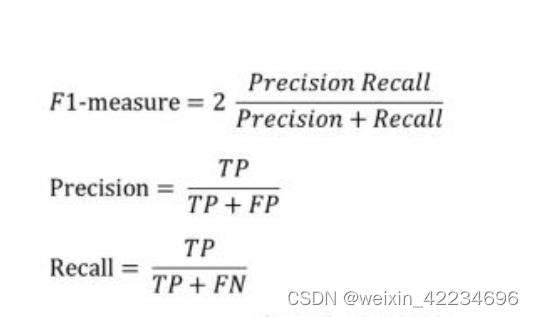
评估指标
在评判True or False时,主要有两种方式:
end point,通过判断线的端点间的距离及其包围面积是否超过阈值
IOU,直接计算IOU的重叠面积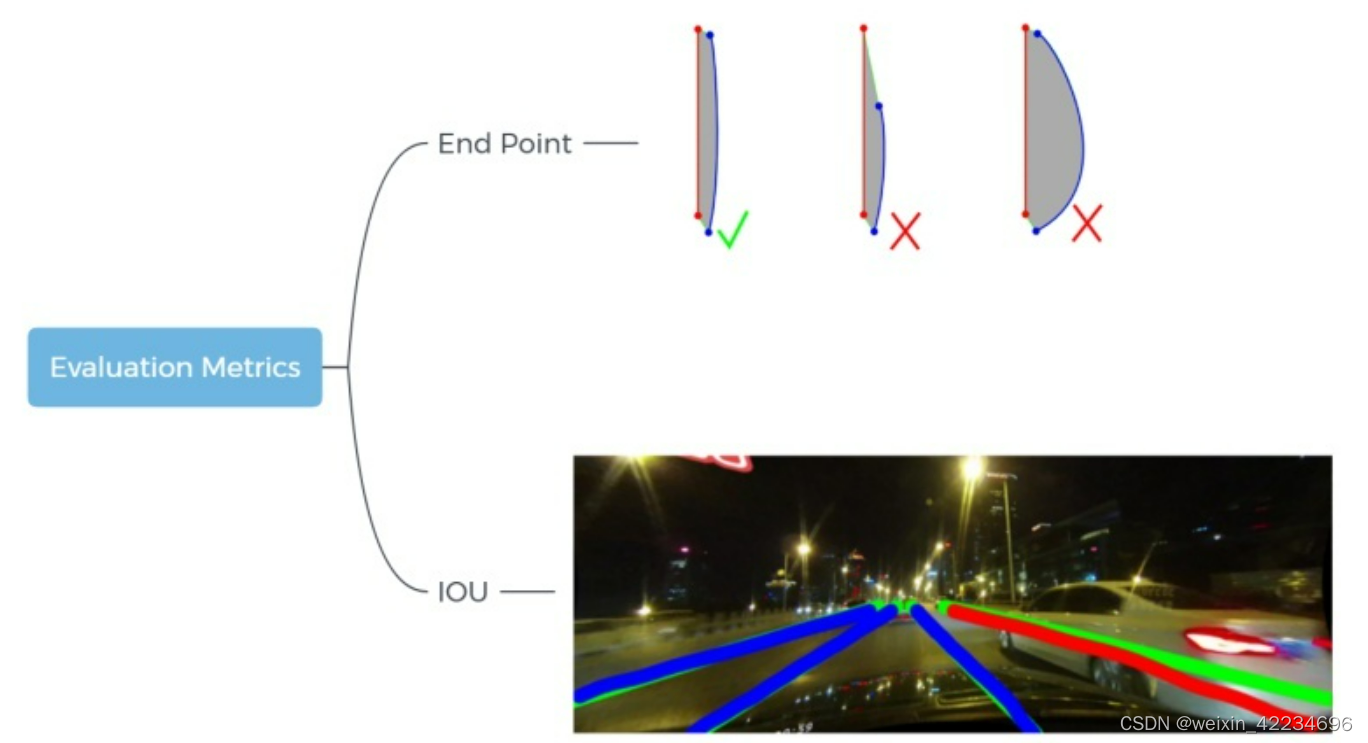
版权归原作者 weixin_42234696 所有, 如有侵权,请联系我们删除。