
文章目录
0 前言
在曝光融合(Exposure Fusion)算法问世之前,多曝光序列合成用于显示的HDR需要两个步骤,第一步是将多张不同曝光的低动态范围图像合成为HDR(例如Debevec提出的加权融合方法),通常HDR为12bit或者16bit;第二步是通过tonemapping对高动态范围HDR进行压缩以支持低动态范围显示设备(例如Durand提出的基于双边滤波的tonemapping算法),一般会压缩至8bit。
曝光融合算法的优势在于不需要标定相机响应曲线,并且跳过tonemapping步骤,直接合成用于显示的高动态范围图像。
1 算法细节
1.1 Naive
1.1.1 主要思想
对于多曝光图像序列,取每一张图像中最有价值的部分用于合成。例如,曝光时间长的图像中暗区细节丰富同时噪声水平低,那么暗区就是有价值的部分。显然,需要一个指标来衡量每张图像中哪些像素有价值,然后通过计算每张图每个像素的价值指标当作对应的权重,最终通过加权融合的方式得到HDR。
1.1.2 权重计算
从对比度、饱和度和亮度三个维度对像素的价值进行评估:
- 对比度 这里的对比度指的是图像的梯度,对于边缘和纹理等重要的信息分配很大的权重。具体地,对图像的灰度图执行拉普拉斯滤波,结果取绝对值作为对比度指标 C ( I k ) C(I_k) C(Ik)。 C ( I k ) = ∣ △ g r a y ( I k ) ∣ C(I_k)=|\triangle_{gray}(I_k)| C(Ik)=∣△gray(Ik)∣
- 饱和度 RGB三通道之间差异大的可视为饱和度高的区域,反之,对于过曝或者欠曝区域RGB三通道的值趋于一致,饱和度较低。因此,可将RGB三个通道之间的标准差作为饱和度指标。 S k , i , j = ( I k , i , j B − M k , i , j ) 2 + ( I k , i , j G − M k , i , j ) 2 + ( I k , i , j R − M k , i , j ) 2 3 S_{k,i,j}=\sqrt{\frac{(I_{k,i,j}^{B}-M_{k,i,j})^2+(I_{k,i,j}^{G}-M_{k,i,j})^2+(I_{k,i,j}^{R}-M_{k,i,j})^2}{3}} Sk,i,j=3(Ik,i,jB−Mk,i,j)2+(Ik,i,jG−Mk,i,j)2+(Ik,i,jR−Mk,i,j)2 M k , i , j = I k , i , j B + I k , i , j G + I k , i , j R 3 M_{k,i,j}=\frac{I_{k,i,j}^{B}+I_{k,i,j}^{G}+I_{k,i,j}^{R}}{3} Mk,i,j=3Ik,i,jB+Ik,i,jG+Ik,i,jR
- 亮度 对于归一化至0~1范围的图像,将取值在0.5左右的像素视为曝光良好,应该分配很大的权重;接近0和1的分别为欠曝和过曝应该分配很小的权重。像素值与其对应权重的关系符合均值为0.5的高斯分布: E k . i , j = e − ( I k , i , j B − 0.5 ) 2 2 σ 2 ⋅ e − ( I k , i , j G − 0.5 ) 2 2 σ 2 ⋅ e − ( I k , i , j R − 0.5 ) 2 2 σ 2 E_{k.i,j}=e^{-\frac{(I_{k,i,j}^{B}-0.5)^2}{2\sigma^2}} \cdot e^{-\frac{(I_{k,i,j}^{G}-0.5)^2}{2\sigma^2}} \cdot e^{-\frac{(I_{k,i,j}^{R}-0.5)^2}{2\sigma^2}} Ek.i,j=e−2σ2(Ik,i,jB−0.5)2⋅e−2σ2(Ik,i,jG−0.5)2⋅e−2σ2(Ik,i,jR−0.5)2
获取以上3个指标后,就能计算每个像素对应的权重:
W
i
,
j
,
k
=
(
C
i
,
j
,
k
)
w
c
⋅
(
S
i
,
j
,
k
)
w
s
⋅
(
E
i
,
j
,
k
)
w
e
W_{i,j,k}=(C_{i,j,k})^{w_c}\cdot (S_{i,j,k})^{w_s}\cdot (E_{i,j,k})^{w_e}
Wi,j,k=(Ci,j,k)wc⋅(Si,j,k)ws⋅(Ei,j,k)we默认
w
c
=
w
s
=
w
e
=
1
w_c=w_s=w_e=1
wc=ws=we=1;另外,为了保证多张图像在同一位置的权重和为1,需要在图像数量维度上对权重进行归一化:
W
^
i
j
,
k
=
W
i
j
,
k
∑
k
′
=
1
N
W
i
j
,
k
′
\hat{W}_{{ij,k}}=\frac{{W}_{{ij,k}}}{\sum_{k^{\prime}=1}^{N}{W}_{{ij,k^{\prime}}}}
W^ij,k=∑k′=1NWij,k′Wij,k
1.1.3 融合
根据计算的权重对原始图像进行加权求和,即可得到融合后的图像:
H
i
j
=
∑
k
=
1
N
W
^
i
j
,
k
⋅
I
i
j
,
k
H_{ij}=\sum_{k=1}^{N}\hat{W}_{{ij,k}}\cdot I_{ij,k}
Hij=k=1∑NW^ij,k⋅Iij,k
这样粗糙融合的结果存在一个问题,在权重尖锐过渡的区域,由于每张图像的曝光时间不同,绝对强度也不同,导致融合后灰度跳变太大,图像中呈现很多黑色和白色斑点,与噪声形态类似。
权重尖锐过渡区会出现问题,那么可以让其平滑一点,提到平滑自然而然就想到了高斯滤波。作者对权重图做高斯滤波后再进行合成,虽然斑点问题得到了缓解,但是在边缘处会出现光晕现象。
既然光晕是由于边缘处的权重被平滑所导致的,可以考虑使用保边滤波代替高斯滤波。
1.2 Multi-resolution
由于naive版本的融合方式不能完全解决黑白斑点的问题,并且会引入光晕这样的新问题。因此,作者提出了使用拉普拉斯金字塔融合的方式,其流程如下图所示: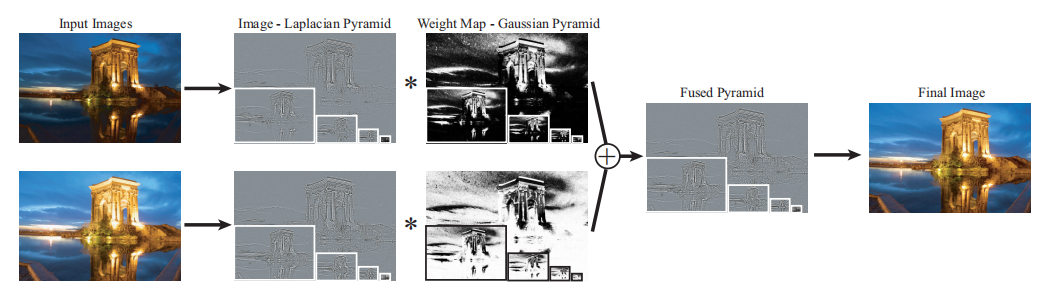
简单来说,就是从不同曝光的原始图像中分解出拉普拉斯金字塔,对应的权重图中分解出高斯金字塔,然后分别在每个尺度下进行融合,得到融合后的拉普拉斯金字塔。最后,从拉普拉斯金字塔的顶层开始向上采样,叠加同尺度的拉普拉斯细节,再向上采样和叠加细节,递归至最高分辨率,得到最终的结果。(此处有一个点需要注意,拉普拉斯金字塔的顶层就是原始图像高斯金字塔的顶层)
- 为什么拉普拉斯金字塔融合效果好? 将平坦区和尖锐过渡区(如边缘)分开融合,平坦区融合使用的是经过多次高斯滤波和下采样后的权重图,仅在比较大的边缘纹理处变化剧烈;由于拉普拉斯金字塔中只保留了边缘等高频信息,因此在拉普拉斯金字塔上对尖锐过渡区进行融合不会影响平坦区。
2 实验
import os
import sys
import glob
import numpy as np
import cv2
import argparse
defshow_image(message, src):
cv2.namedWindow(message,0)
cv2.imshow(message, src)
cv2.waitKey(0)
cv2.destroyAllWindows()defgauss_curve(src, mean, sigma):
dst = np.exp(-(src - mean)**2/(2* sigma**2))return dst
classExposureFusion(object):def__init__(self, sequence, best_exposedness=0.5, sigma=0.2, eps=1e-12, exponents=(1.0,1.0,1.0), layers=7):
self.sequence = sequence # [N, H, W, 3], (0..1), float32
self.img_num = sequence.shape[0]
self.best_exposedness = best_exposedness
self.sigma = sigma
self.eps = eps
self.exponents = exponents
self.layers = layers
@staticmethoddefcal_contrast(src):
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
laplace_kernel = np.array([[0,1,0],[1,-4,1],[0,1,0]], dtype=np.float32)
contrast = cv2.filter2D(gray,-1, laplace_kernel, borderType=cv2.BORDER_REPLICATE)return np.abs(contrast)@staticmethoddefcal_saturation(src):
mean = np.mean(src, axis=-1)
channels =[(src[:,:, c]- mean)**2for c inrange(3)]
saturation = np.sqrt(np.mean(channels, axis=0))return saturation
@staticmethoddefcal_exposedness(src, best_exposedness, sigma):
exposedness =[gauss_curve(src[:,:, c], best_exposedness, sigma)for c inrange(3)]
exposedness = np.prod(exposedness, axis=0)return exposedness
defcal_weight_map(self):
weights =[]for idx inrange(self.sequence.shape[0]):
contrast = self.cal_contrast(self.sequence[idx])
saturation = self.cal_saturation(self.sequence[idx])
exposedness = self.cal_exposedness(self.sequence[idx], self.best_exposedness, self.sigma)
weight = np.power(contrast, self.exponents[0])* np.power(saturation, self.exponents[1])* np.power(exposedness, self.exponents[2])# Gauss Blur# weight = cv2.GaussianBlur(weight, (21, 21), 2.1)
weights.append(weight)
weights = np.stack(weights,0)+ self.eps
# normalize
weights = weights / np.expand_dims(np.sum(weights, axis=0), axis=0)return weights
defnaive_fusion(self):
weights = self.cal_weight_map()# [N, H, W]
weights = np.stack([weights, weights, weights], axis=-1)# [N, H, W, 3]
naive_fusion = np.sum(weights * self.sequence *255, axis=0)
naive_fusion = np.clip(naive_fusion,0,255).astype(np.uint8)return naive_fusion
defbuild_gaussian_pyramid(self, high_res):
gaussian_pyramid =[high_res]for idx inrange(1, self.layers):
gaussian_pyramid.append(cv2.GaussianBlur(gaussian_pyramid[-1],(5,5),0.83)[::2,::2])return gaussian_pyramid
defbuild_laplace_pyramid(self, gaussian_pyramid):
laplace_pyramid =[gaussian_pyramid[-1]]for idx inrange(1, self.layers):
size =(gaussian_pyramid[self.layers - idx -1].shape[1], gaussian_pyramid[self.layers - idx -1].shape[0])
upsampled = cv2.resize(gaussian_pyramid[self.layers - idx], size, interpolation=cv2.INTER_LINEAR)
laplace_pyramid.append(gaussian_pyramid[self.layers - idx -1]- upsampled)
laplace_pyramid.reverse()return laplace_pyramid
defmulti_resolution_fusion(self):
weights = self.cal_weight_map()# [N, H, W]
weights = np.stack([weights, weights, weights], axis=-1)# [N, H, W, 3]
image_gaussian_pyramid =[self.build_gaussian_pyramid(self.sequence[i]*255)for i inrange(self.img_num)]
image_laplace_pyramid =[self.build_laplace_pyramid(image_gaussian_pyramid[i])for i inrange(self.img_num)]
weights_gaussian_pyramid =[self.build_gaussian_pyramid(weights[i])for i inrange(self.img_num)]
fused_laplace_pyramid =[np.sum([image_laplace_pyramid[n][l]*
weights_gaussian_pyramid[n][l]for n inrange(self.img_num)], axis=0)for l inrange(self.layers)]
result = fused_laplace_pyramid[-1]for k inrange(1, self.layers):
size =(fused_laplace_pyramid[self.layers - k -1].shape[1], fused_laplace_pyramid[self.layers - k -1].shape[0])
upsampled = cv2.resize(result, size, interpolation=cv2.INTER_LINEAR)
result = upsampled + fused_laplace_pyramid[self.layers - k -1]
result = np.clip(result,0,255).astype(np.uint8)return result
if __name__ =='__main__':
root_path = sys.argv[1]
sequence_path =[os.path.join(root_path, fname)for fname in os.listdir(root_path)]
sequence = np.stack([cv2.imread(path)for path in sequence_path], axis=0)
mef = ExposureFusion(sequence.astype(np.float32)/255.0)
naive_fusion_result = mef.naive_fusion()
multi_res_fusion = mef.multi_resolution_fusion()
show_image('muti-resolution', multi_res_fusion)
3 参考
Mertens T, Kautz J, Van Reeth F. Exposure fusion[C]//15th Pacific Conference on Computer Graphics and Applications (PG’07). IEEE, 2007: 382-390.
https://zhuanlan.zhihu.com/p/455674916
版权归原作者 有时候。 所有, 如有侵权,请联系我们删除。