
目录
Windows 10(64bits) + VMware 16 Pro + Ubuntu 20.04 + noetic
针对轨迹绘制问题,主要包含两个具体问题:其一,怎么让算法生成轨迹文件?其二,怎么使用EVO工具?A-LOAM算法作为最简单的激光SLAM算法,故本文以该算法为例进行学习和调试。
一、基本调试
1.1 EVO工具安装
直接在终端输入以下代码进行快捷安装就可以,非常简单。
pip install evo --upgrade --no-binary evo
1.2 EVO绘制KITTI数据集真值轨迹
在轨迹文件存放位置打开终端,输入以下命令即可用EVO工具绘制轨迹图,同时可以得到姿态角变化。
注意:
- kitti代表数据格式,主要有kitti、tum、euroc、ros格式,本文选择生成tum格式的轨迹,相比于kitti格式,多个时间戳。
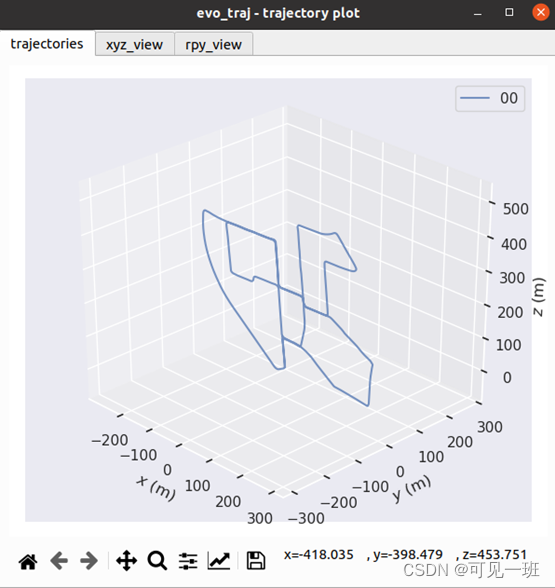
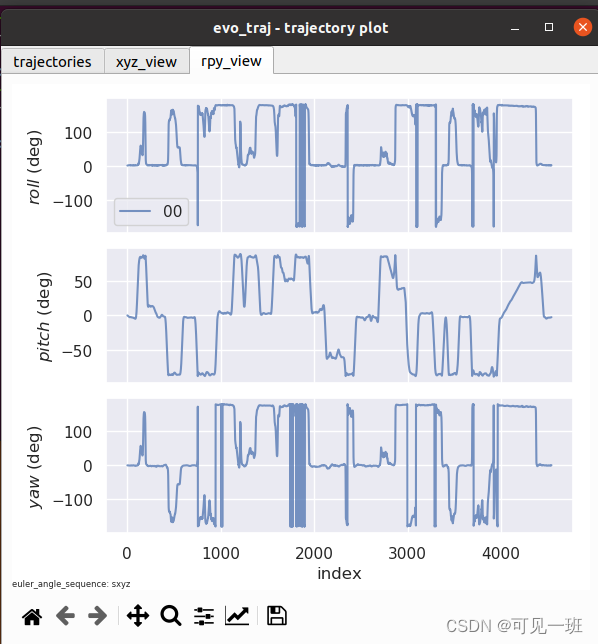
evo_traj kitti 00.txt -p
序列00的轨迹和姿态角如下图。
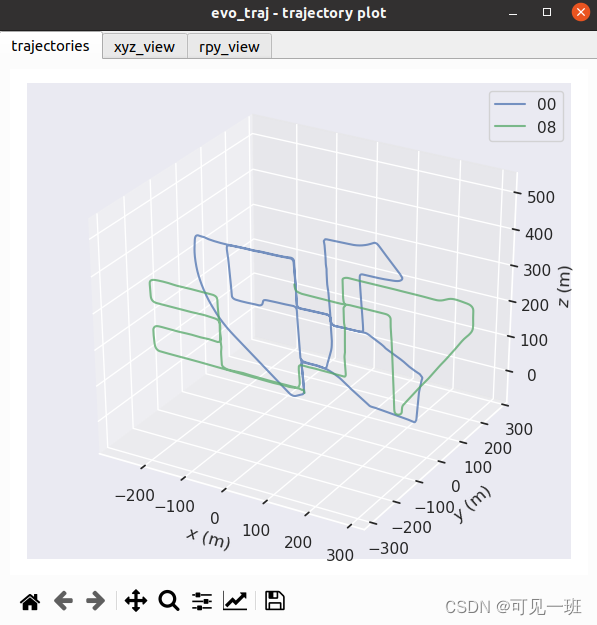
1.3 同时绘制两条轨迹
绘制kitti数据集00和08轨迹。
evo_traj kitti 00.txt 08.txt -p
1.4 确定发布轨迹的topic以及所在文件
根据算法节点图查看topic和node结构,确定发布轨迹topic的代码在laserMapping.cpp里。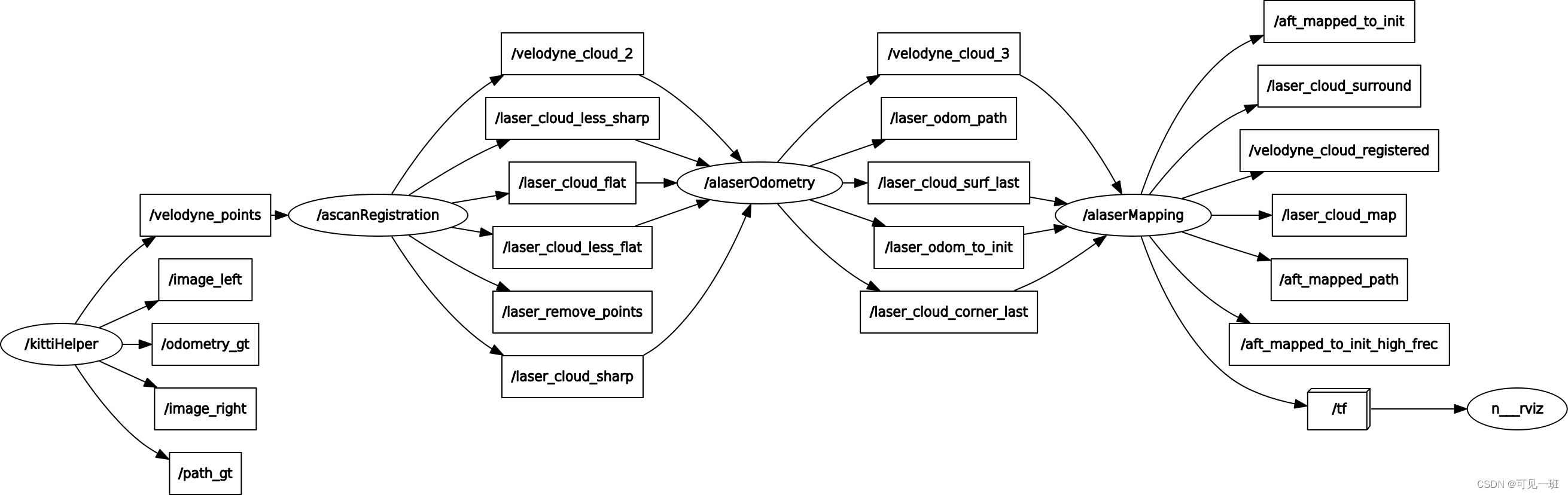
使用以下命令查看topic的输出内容,一个是高帧率的轨迹,一个是建图后的低帧率轨迹。
rostopic echo /laser_odom_path
rostopic echo /aft_mapped_path
二、A-LOAM算法生成轨迹文件
经过查阅,发现这方面的分享博客很少,借鉴少有的几份代码,发现主要是采用C++的输出文件流ofstream函数实现。
2.1 修改laserMapping.cpp代码
在发布里程计topic代码后面增加代码,并重新catkin_make编译。
********************原代码,方便找代码添加位置*****************
nav_msgs::Odometry odomAftMapped;
odomAftMapped.header.frame_id ="camera_init";
odomAftMapped.child_frame_id ="/aft_mapped";
odomAftMapped.header.stamp = laserOdometry->header.stamp;
odomAftMapped.pose.pose.orientation.x = q_w_curr.x();
odomAftMapped.pose.pose.orientation.y = q_w_curr.y();
odomAftMapped.pose.pose.orientation.z = q_w_curr.z();
odomAftMapped.pose.pose.orientation.w = q_w_curr.w();
odomAftMapped.pose.pose.position.x = t_w_curr.x();
odomAftMapped.pose.pose.position.y = t_w_curr.y();
odomAftMapped.pose.pose.position.z = t_w_curr.z();
pubOdomAftMappedHighFrec.publish(odomAftMapped);****************************加在这里******************************//根据自己的文件存放位置修改路径和文件名
std::ofstream pose1("/路径/文件名.txt", std::ios::app);
pose1.setf(std::ios::scientific, std::ios::floatfield);
pose1.precision(8);staticdouble timeStart = odometryBuf.front()-> header.stamp.toSec();auto T1 = ros::Time().fromSec(timeStart);
pose1 << odomAftMapped.header.stamp - T1 <<" "<< odomAftMapped.pose.pose.position.x <<" "<< odomAftMapped.pose.pose.position.y <<" "<< odomAftMapped.pose.pose.position.z <<" "<< odomAftMapped.pose.pose.orientation.x <<" "<< odomAftMapped.pose.pose.orientation.y <<" "<< odomAftMapped.pose.pose.orientation.z <<" "<< odomAftMapped.pose.pose.orientation.w << std::endl;
pose1.close();
2.2 运行代码并播放数据集
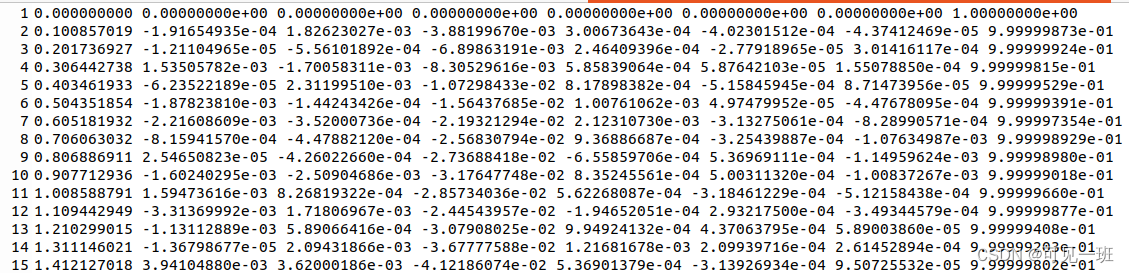
播放nsh_indoor_outdoor数据集,可以看到在选择的路径下面生成了一个.txt文件,存放了tum格式的轨迹,包括时间戳,位置,姿态四元数。
注意:
- 结果数据精度取决于precision后面括号里的数。
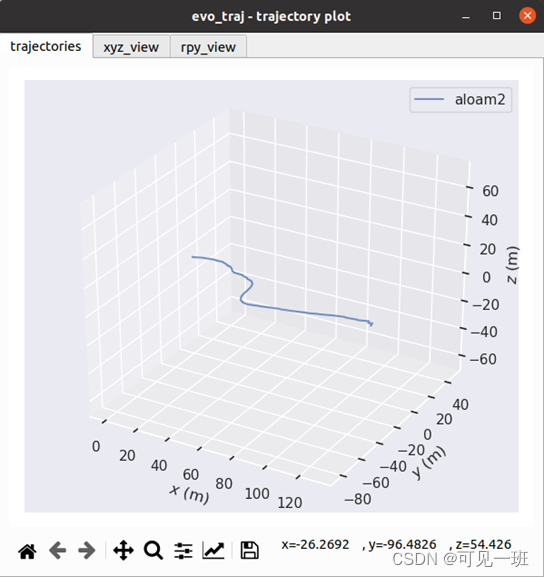
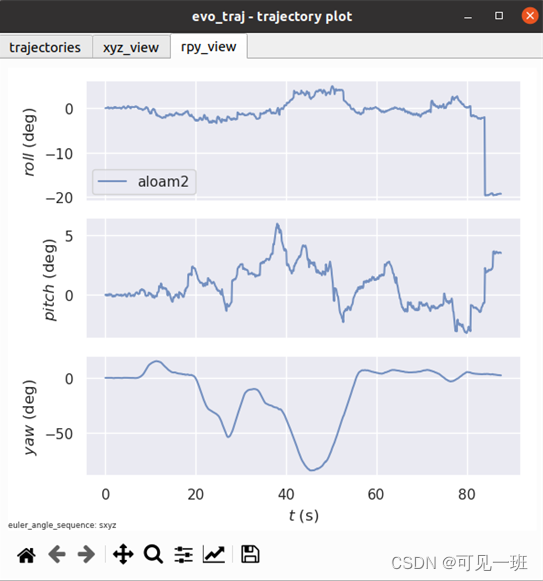
2.3 EVO绘制轨迹
注意:
- 我们是按照tum格式生成的文件,所以把格式类型从“kitti”改为“tum”
evo_traj tum aloam2.txt -p
三、尚存问题
1、绘制的kitti数据集的轨迹,为什么坐标轴不对
2、轨迹误差分析
本文转载自: https://blog.csdn.net/abanchao/article/details/127226901
版权归原作者 可见一班 所有, 如有侵权,请联系我们删除。
版权归原作者 可见一班 所有, 如有侵权,请联系我们删除。