
目标检测算法总体分为:基于区域的算法和基于回归的算法
1)基于区域的算法: RCNN, Fast RCNN, Faster RCNN, Mask RCNN 等。整个检测过程分为两个阶段。在第一个阶段,检测器需要找到一些假设的区域 (ROI);在第二个阶段,检测器需要在这些假设区域上进行分类 (classification) 和 位置回归 (bounding box regression)。
2)基于回归的算法:YOLO系列 等。检测是一个端到端 (end-to-end) 的过程,直接回归出物体的类别和位置。
SSD(Single Shot MultiBox Detector)是一个one stage的检测算法。它可以认为是 Faster RCNN 和 YOLO 的结合:采用了基于回归的模式(类似于YOLO),在一个网络中直接回归出物体的类别和位置,因此检测速度很快。同时也利用了基于区域的概念(类似于Faster RCNN),在检测的过程中,使用了许多候选区域作为ROI。
Faster RCNN的回顾:
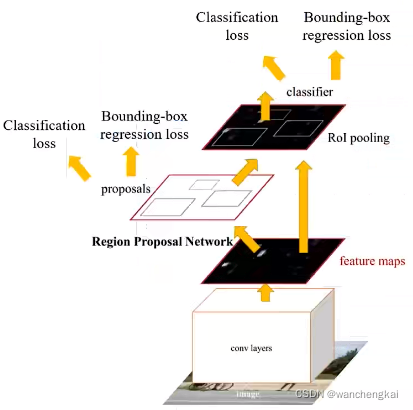
Faster RCNN存在的问题:
1)对小目标检测效果很差(只在一个特征层进行预测,这个特征层已经经过很多卷积层之后的,经过的越多,抽象层次越高,图像的细节信息保留越少,小目标效果越差,要在相对低层次上的特征来进行预测)
2)模型大,检测速度慢(两次预测,two stages方法的通病)
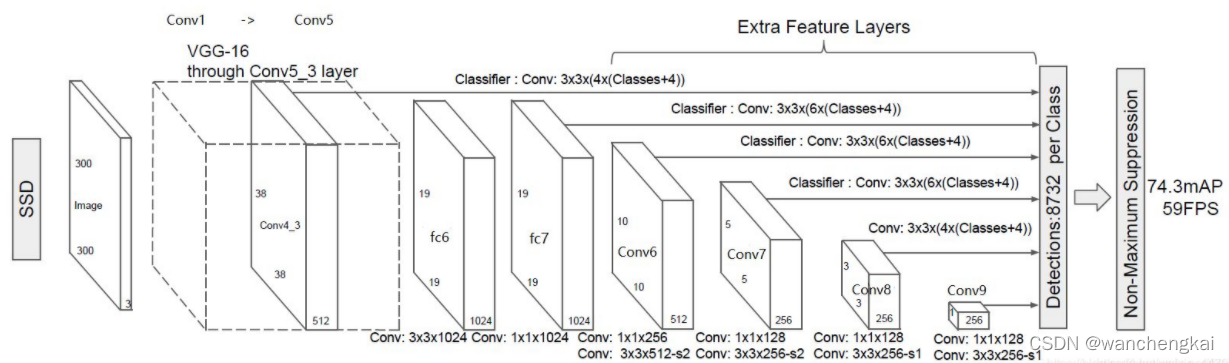
SSD网络
在不同特征尺度上预测不同尺度的目标
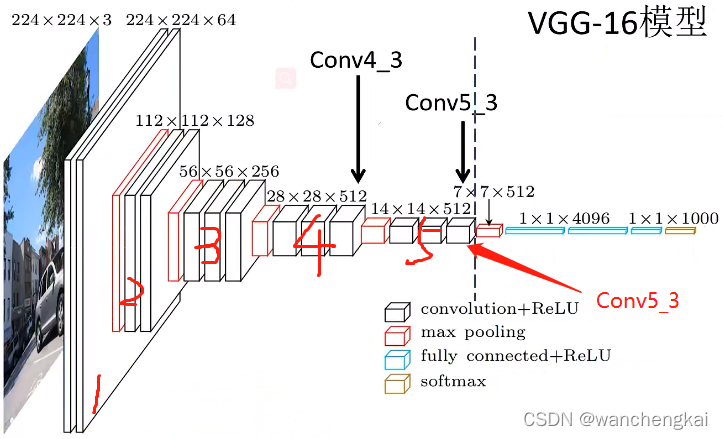
骨干网络:
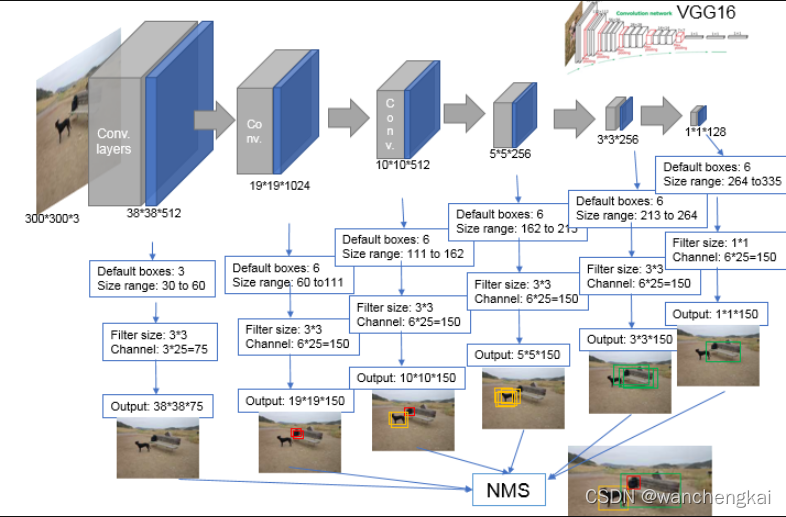
SSD的骨干网络是基于传统的图像分类网络,采用了vgg16的部分网络作为基础网络。如图所示,经过10个卷积层(conv layer) 和 3个池化层(max pooling) 的处理,我们可以得到一个尺寸为 38×38×512 的特征图 (Conv4_3 feature map)。下一步,我们需要在这个特征图上进行回归,得到物体的位置和类别。
回归 (Regression):
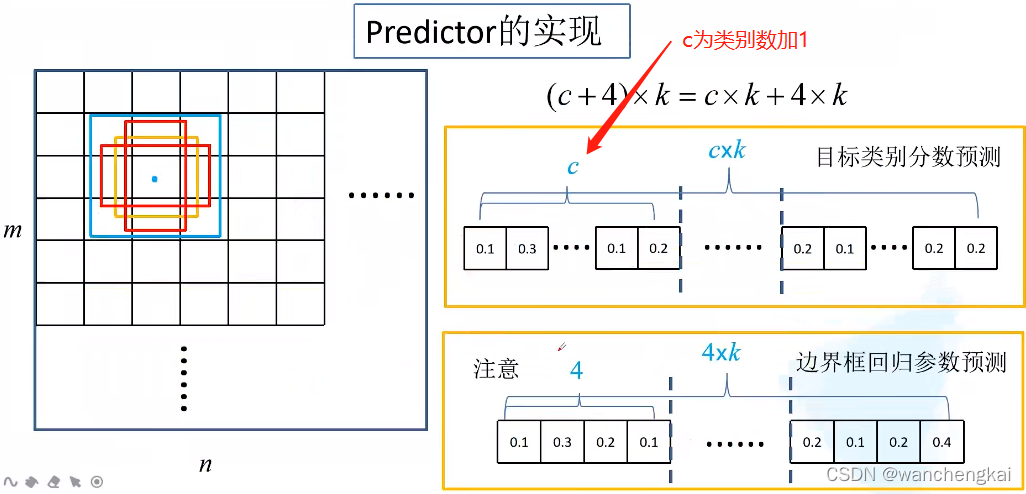
和 YOLO 的回归操作相似,首先我们先考虑在特征图的每个位置上,有且只有一个候选框(default box)的情况。
1)位置回归:检测器需要给出框中心偏移量 (cx,cy),相对于图片尺寸的宽度和高度 (w,h),总计需要回归4个参数。(Fast RCNN是每一个类别都要一个回归框,总共(N+1)*4个参数)
**2)分类: **对于每一个 bounding box,我们需要给出 20个类别+1个背景类的得分(score)。
对于每一个位置,我们需要一个25维的向量来存储检测物体的位置和类别信息。对于我们的38×38的特征图,我们需要一个维度为 38×38×25 的空间来存储这些信息。因此,检测器需要学习特征图(38×38×512)到检测结果(38×38×25)的映射关系。这一步转换,使用的是卷积操作:使用25个3×3的卷积核,对特征图进行卷积。到这里,我们已经完成了在每个位置上回归一个框的操作。
3)多个候选框:SSD在每个位置上,希望回归k个基于不同尺寸的框。因此在每个位置上需要 25×k 维的空间,存储这些框的回归和分类信息,因而卷积操作变成了使用 25×k个3×3的卷积核,来获得 38×38×25k 维度的检测结果图(score map)。
4)多个特征图:对于神经网络,浅层的特征图包含了更较多的细节信息,更适合进行小物体的检测;而较深的特征图包含了更多的全局信息,更适合大物体的检测。因此,通过在不同的特征图上对不同尺寸的候选框进行回归,可以对不同尺寸的物体有更好的检测结果。
SSD的检测精度和速度都非常出色,76.8 mAP 和 22FPS 超过了Faster RCNN和YOLO
版权归原作者 平淡的白凱水 所有, 如有侵权,请联系我们删除。