
一 系统分析
1、手写体输入为28x28的黑白图片,所以输入为784个
2、输出为识别0-9的数字的概率,所以有10个输出
3、输入只能是-1~1的小数,主要是防止计算溢出
1.1 全连接神经网络简介
全连接神经网络模型是一种多层感知机(MLP),感知机的原理是寻找类别间最合理、最具有鲁棒性的超平面,最具代表的感知机是SVM支持向量机算法。神经网络同时借鉴了感知机和仿生学,通常来说,动物神经接受一个信号后会发送各个神经元,各个神经元接受输入后根据自身判断,激活产生输出信号后汇总从而实现对信息源实现识别、分类,一个典型的神经网络如下图所示: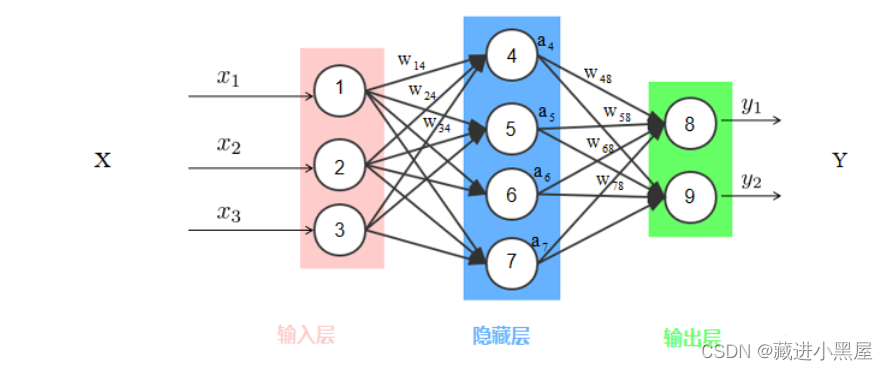
上图是典型的全连接神经网络模型(DNN),有的场合也称作深度神经网络,与传统的感知机不同,每个结点和下一层所有结点都有运算关系,这就是名称中‘全连接’的含义,上图的中间层也成为隐藏层,全连接神经网络通常有多个隐藏层,增加隐藏层可以更好分离数据的特征,但过多的隐藏层也会增加训练时间以及产生过拟合。
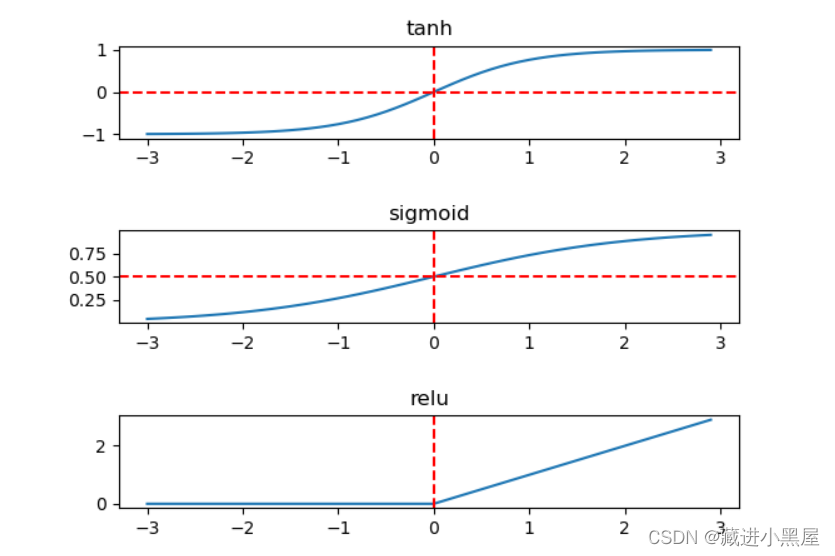
观察上图,输入数据是一个3维向量,隐藏层有5个结点,意味着通过线性映射将3维向量映射为一个5维向量,最后再变为一个2维向量输出。当原输入数据是线性不可分时,全连接神经网络是通过激活函数产生出非线性输出,常见的激活函数有Sigmoid,Tanh,Relu,分别如下图所示:
全连接神经网络训练分为前向传播、后向传播两个过程,前向传播数据沿输入到输出后计算损失函数值,后向传播则是一个优化过程,利用梯度下降法减小前向传播产生的损失函数值,从而优化、更新参数。
** 简言之:**
输入层输入数据,在经过中间隐藏层计算,最后通过右边输出层输出数据
本次项目做的手写体识别就是基于全连接神经网络来实现的
二 通过HLS 编写全连接神经网络传入权重参数和偏置参数文件
2.1 获得图片、权重以及偏置的参数
python+tensorflow对mnist数据集的神经网络训练和推理 加参数提取
参数提取
2.2 编写C语言的全连接算子
头文件导入 :
#include <stdio.h>
#include "HLS/hls.h"
#include "input_0.h"//十幅图片
#include "input_1.h"
#include "input_2.h"
#include "input_3.h"
#include "input_4.h"
#include "input_5.h"
#include "input_6.h"
#include "input_7.h"
#include "input_8.h"
#include "input_9.h"
#include "layer1_bias.h" //第一层偏置常数
#include "layer1_weight.h" //第一层权重
#include "layer2_bias.h" //第二层偏置常数
#include "layer2_weight.h" //第二层权重值
将十幅图像导入,并且将权重和偏置参数头文件加入进去
2.3 Slave Interfaces
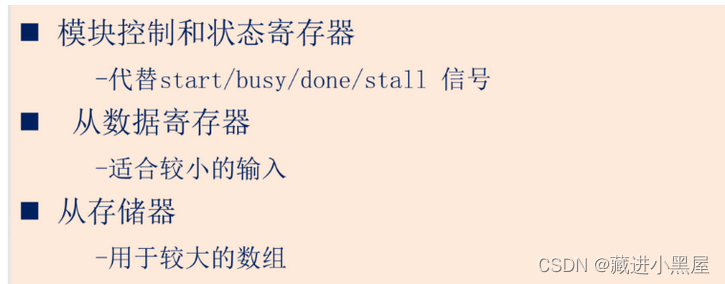
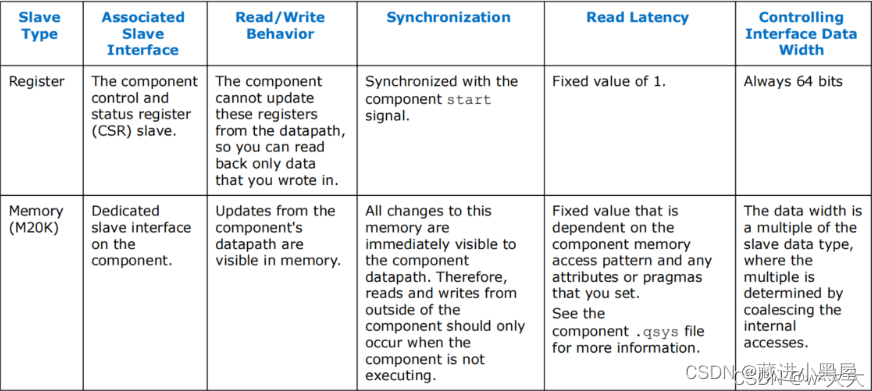
Intel HLS Compiler提供了两种不同类型的从接口,您可以在组件中使用它们。一般来说,较小的标量输入应该使用从寄存器。如果您打算将大数组复制到组件中或从组件中复制出来,那么应该使用从属内存。
2.3.1 hls_avalon_slave_component
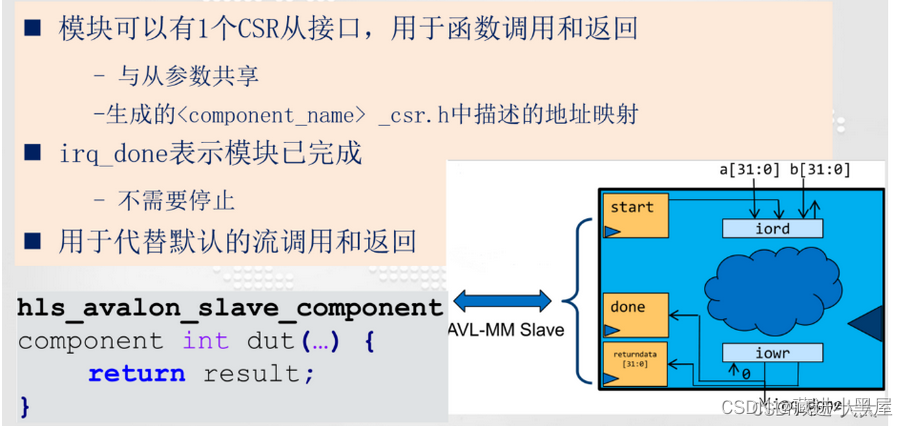
#include <HLS/hls.h>
#include <stdio.h>
hls_avalon_slave_component
component int dut(int a,int b)
{
return a*b;
}
int main()
{
int a=2;
int b=3;
int y;
y = dut(a,b);
printf("y=%d",y);
return 0;
}
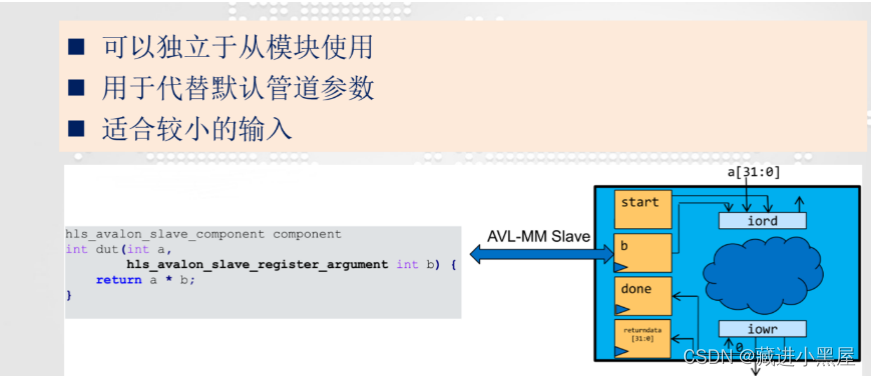
** 2.3.2 hls_avalon_slave_register_argument**
#include <HLS/hls.h>
#include <stdio.h>
hls_avalon_slave_component
component int dut(
int a,
hls_avalon_slave_register_argument int b)
{
return a*b;
}
int main()
{
int a=2;
int b=3;
int y;
y = dut(a,b);
printf("y=%d",y);
return 0;
}
可见** b **变成了寄存器
2.3.3 slave_memory_argument
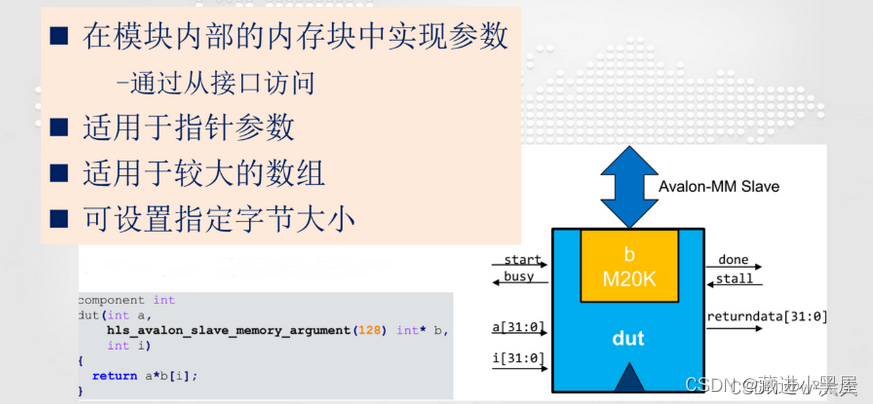
#include <HLS/hls.h>
#include <HLS/stdio.h>
hls_avalon_slave_component
component int dut(
hls_avalon_slave_memory_argument(5*sizeof(int)) int *a,
hls_avalon_slave_memory_argument(5*sizeof(int)) int *b
)
{
int i;
int sum=0;
for(i=0;i<5;i++)
{
sum = sum + a[i] * b[i];
//printf("a[%d]%d",i,a[i]);
}
return sum;
}
int main()
{
int a[5] = {1,2,3,4,5};
int b[5] = {1,2,3,4,5};
int sum;
sum = dut(a,b);
printf("sum=%d",sum);
return 0;
}
这样子 a、b都变成了存储器类型
本次实验就是使用HLS将输入图片、权重、偏置生成为从存储器类型的电路元件,方便后续在软件端将数据存入从存储器中并调用。
全连接代码:
#include <stdio.h>
#include "HLS/hls.h"
#include "input_0.h"//十幅图片
#include "input_1.h"
#include "input_2.h"
#include "input_3.h"
#include "input_4.h"
#include "input_5.h"
#include "input_6.h"
#include "input_7.h"
#include "input_8.h"
#include "input_9.h"
#include "layer1_bias.h" //第一层偏置常数
#include "layer1_weight.h" //第一层权重
#include "layer2_bias.h" //第二层偏置常数
#include "layer2_weight.h" //第二层权重值
hls_avalon_slave_component component
int my_predit(
hls_avalon_slave_memory_argument(784*sizeof(float)) float *img,
hls_avalon_slave_memory_argument(64*sizeof(float)) float *b1,
hls_avalon_slave_memory_argument(784*64*sizeof(float)) float *w1,
hls_avalon_slave_memory_argument(10*sizeof(float)) float *b2,
hls_avalon_slave_memory_argument(64*10*sizeof(float)) float *w2){
float res1[64]={0},res2[10]={0}; //创建两个浮点数数组 yongyu
//循环1
/* w1权重在 layer1_weight.h 中按照一行64个,784列顺序排列,
但实际上是一维数组,我们计算第一层64个神经元的输出*/
for (int i = 0; i < 64; i++)
{
for (int j = 0; j < 784; j++)
{
res1[i] = res1[i]+ img[j] * w1[i+j*64]; //w1x1+w2x2 ... wnxn+b
}
res1[i] +=b1[i]; //得到第一层的输出
//printf("%f \n",res1[i]);
}
//循环2
for (int i = 0; i < 10; i++)
{
for (int j = 0; j < 64; j++)
{
res2[i] = res2[i]+ res1[j] * w2[i+j*10]; //输入第一层的输出
}
res2[i] +=b2[i];
//printf("%f \n",res2[i]);
}
//输出
float temp = 0; //用一个中间值来寄存特征值最大值
int res3;
for (int i = 0; i < 10; i++)
{
//printf("%f \n",res2[i]);
if (res2[i] > temp) //比较10个特征值,找出最大值
{
temp = res2[i];
res3 = i; //res3的值即为输出层数组中特征值最大值对应的下标 ,也是我们想要的结果
}
}
return res3; //最后返回i,即是我们的预测结果
}
int main()
{
//用指针数组来表示10幅图片
float *a[10] = {input_0,input_1,input_2,input_3,input_4,input_5,input_6,input_7,input_8,input_9};
for (int i = 0; i < 10; i++) //循环输出训练结果
{
int res = my_predit(a[i],layer1_bias,layer1_weight,layer2_bias,layer2_weight);//调用函数输出返回值
printf("input_%d.h预测结果为:%d\n",i,res);
}
return 0;
}
三 输入图片进行测试并生成IP
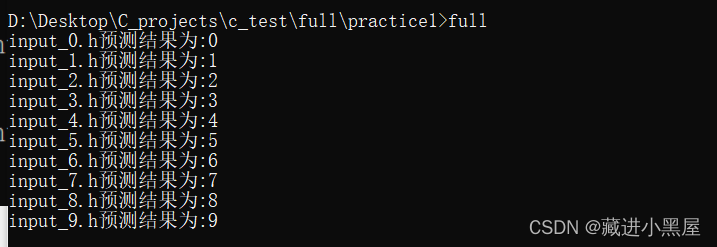
main函数的作用仅仅是测试用的,并没有实际的意义,目的就是将十幅图像的像素输入,得到返回结果并输出。
3.1 编译、测试
3.1.1 初始化环境
就是进入到你Quartus安装目录下的HLS路径下,用终端运行后,初始化hls环境。
下面以我的安装目录为例,作为示范:
1 :先找到路径
** 2 : 敲cmd 回车**
** 3 :输入初始化命令**
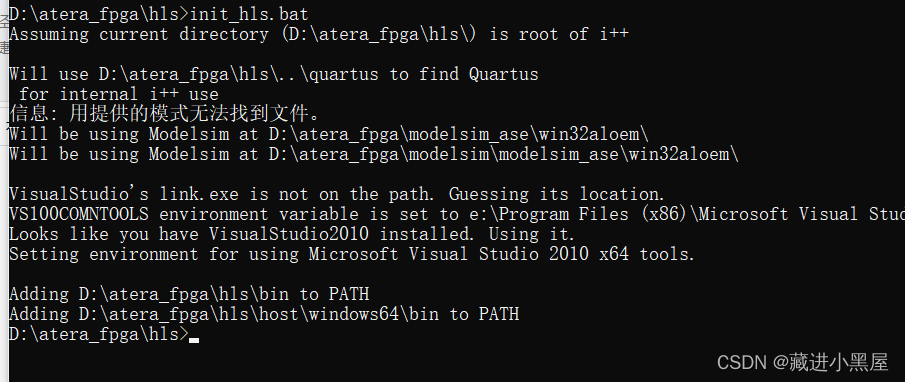
初始化完成。
3.1.2 编译
终端先不关闭,还要进行编译工作
回到你代码编写的路径下
在 x86-64平台上编译:

** -v : 作用是显示信息**
-0 full :生成名为 full 的可执行文件
运行结果:
** 在FPGA平台上编译测试:**

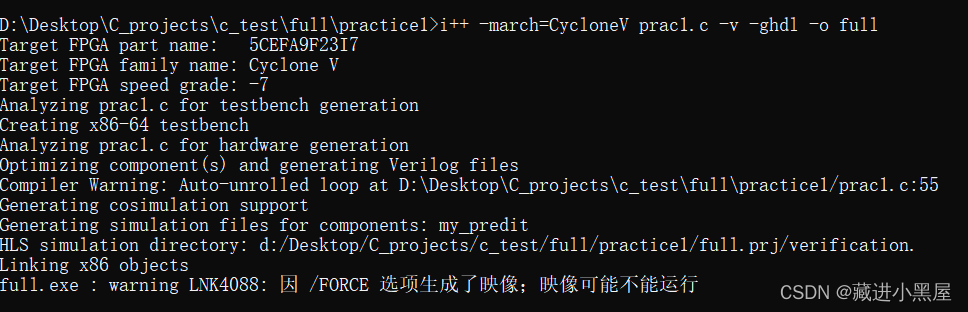
生成IP文件夹

到这里神经网络IP制作完成。
3.2 添加IP进Quartus并添加到SOC工程中生成硬件
3.2.1 将IP文件夹复制到黄金工程的IP文件夹下
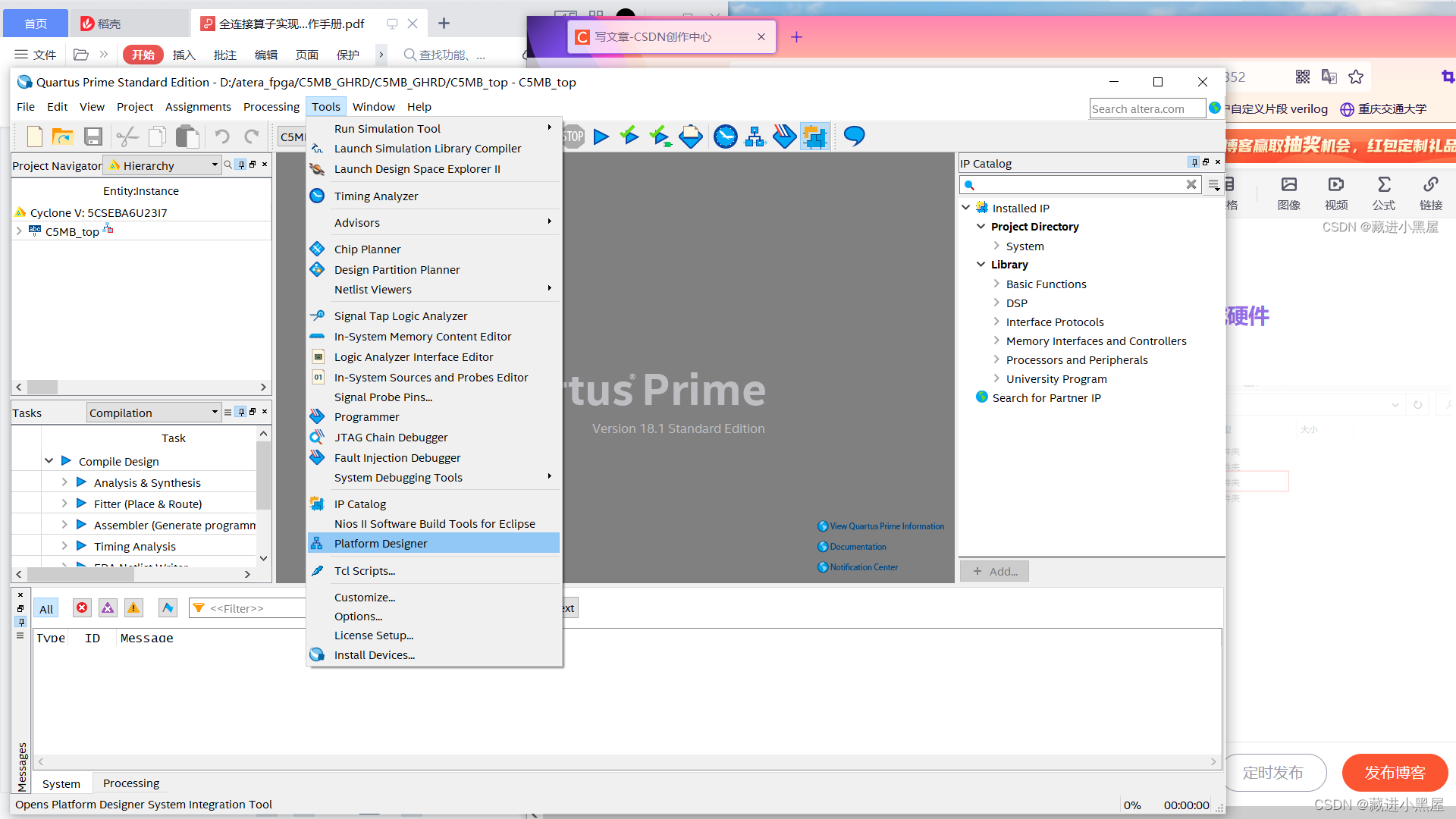
3.2.2 打开黄金工程
1. 打开platform designer
**2 添加神经网络IP到工程并连线 **
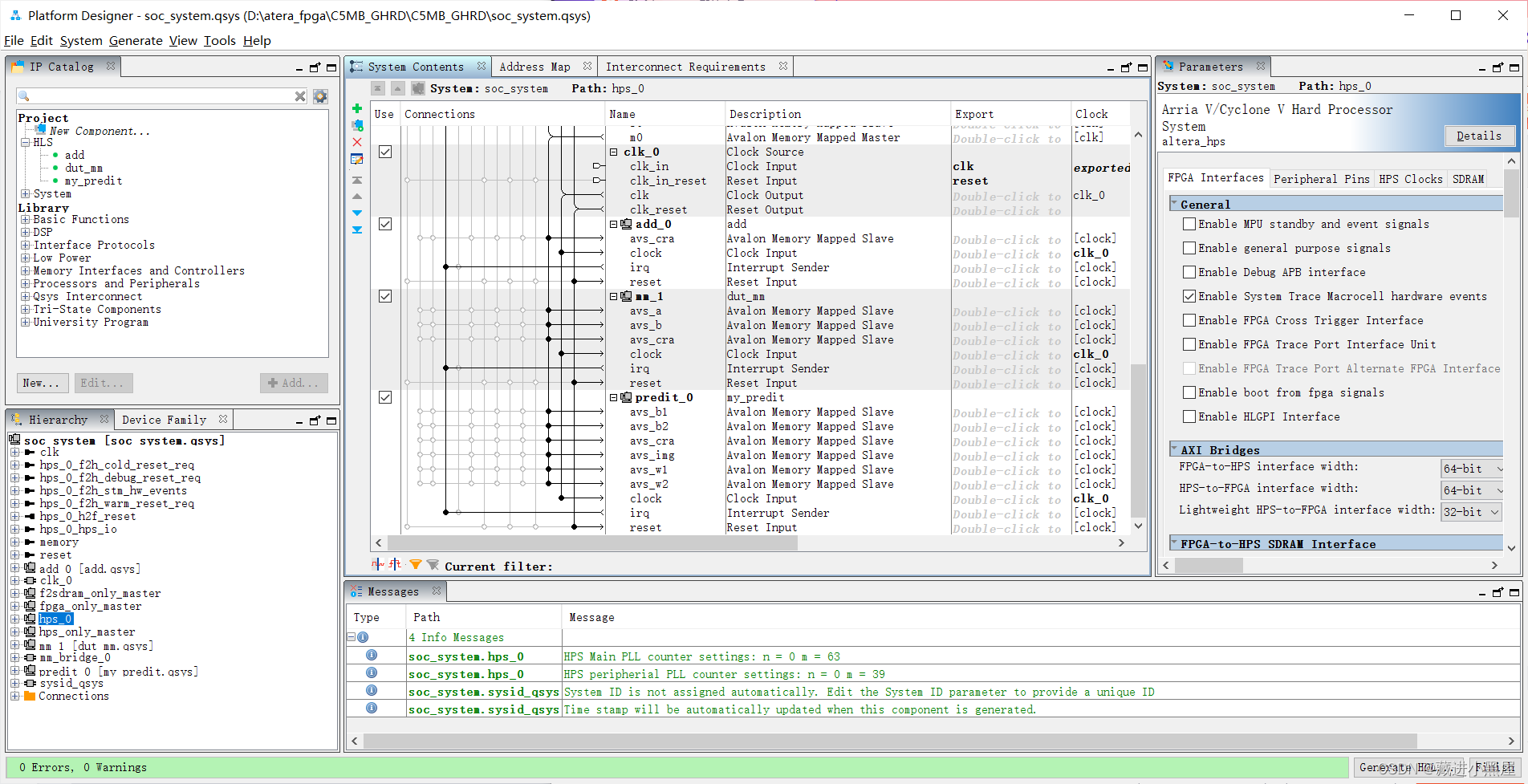
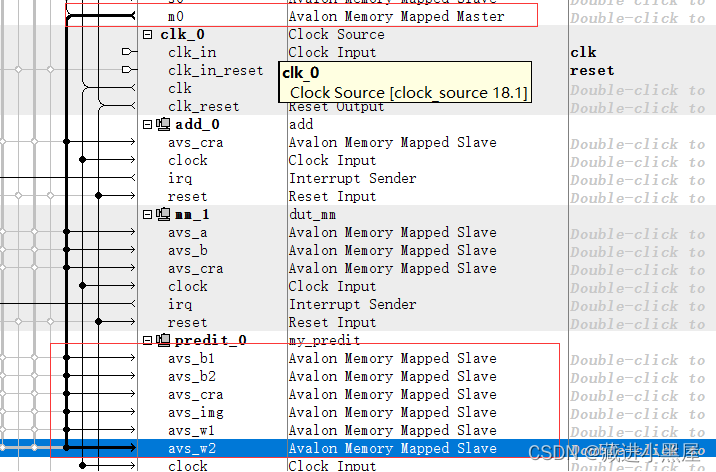
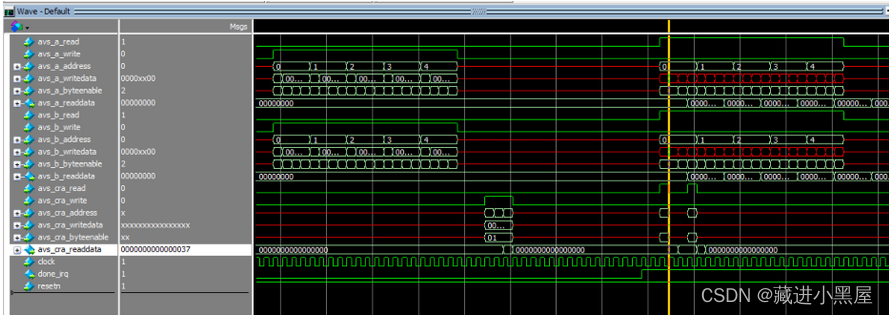
将 Avalon Memory Mapped Slave接口的 权重、偏置、图片、控制状态存储器连接到 mm_bridge的avalon Memory Mapped Master的m0上 ,时钟和复位都连到mm_bridge上,irq连接到 **f2h_irq0. **
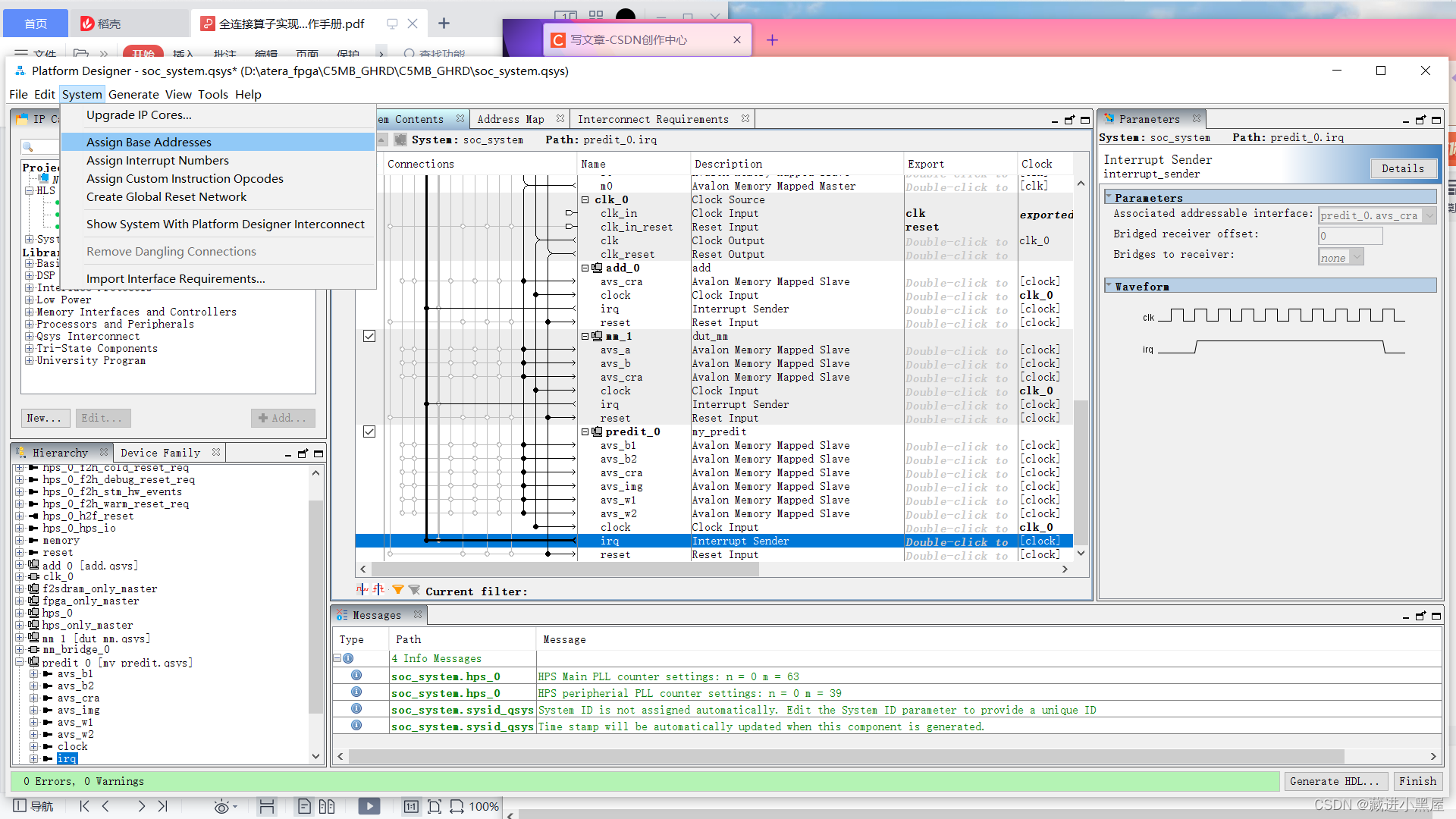
3. 然后分配基地址
**4. generate **
一般会编译十几分钟,慢慢等吧。
5. 全编译
这一步会更久,半小时加,可以直接去设计软件端。
编译完后会生成sof文件
四 更新SD卡
4.1 生成设备树
打开EDS工具,是Intel专门为SOC FPGA开发设计的一款工具,类似于终端。里面包含了很多工具。
进入到黄金工程目录后,
更新设备树文件:
make dtb
生成设备树文件


4.2 生成rbf文件
进入黄金工程目录下的output_files目录下,双击sof_to_rbf.bat
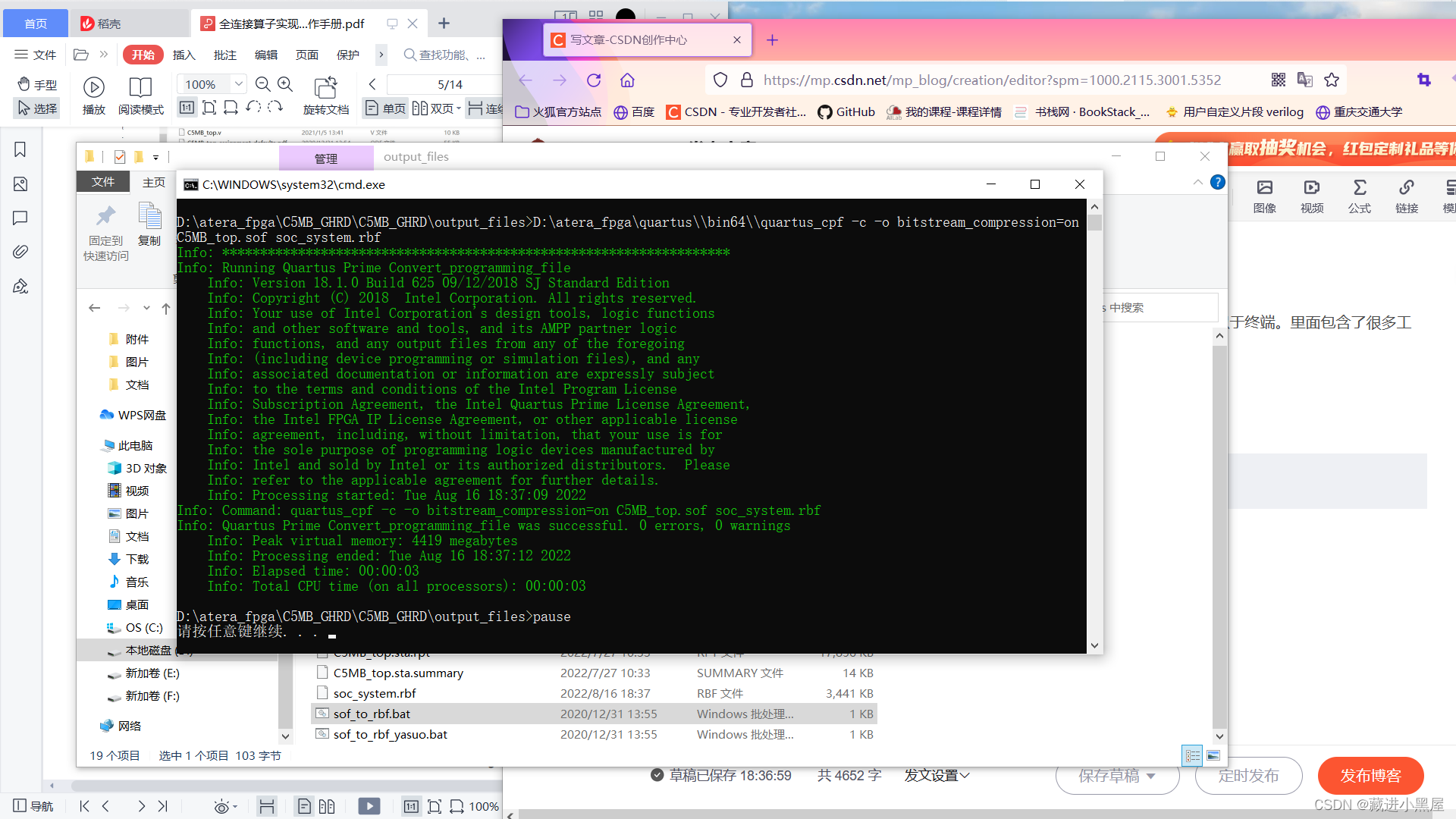

二进制文件更新完毕。
4.3 更新头文件
./generate_hps_qsys_header.sh

将更新的后的二进制文件和设备树文件更换SD卡中的文件。
五 设计软件
5.1 新建C工程
创建完项目,再创建c程序,
添加库文件路径:

路径是根据自己安装目录下去寻找。
编写源代码,添加权重、偏置、测试图片文件
将全连接生成的权重、偏置、测试图片的头文件以及hps_0.h复制到工程中。
5.2 代码设计
/*
* full.c
*
* Created on: 2022年7月27日
* Author: 药石无医
*/
#include "layer1_bias.h"
#include "layer1_weight.h"
#include "layer2_bias.h"
#include "layer2_weight.h"
#include "input_0.h"//十幅图片
#include "input_1.h"
#include "input_2.h"
#include "input_3.h"
#include "input_4.h"
#include "input_5.h"
#include "input_6.h"
#include "input_7.h"
#include "input_8.h"
#include "input_9.h"
//gcc标准头文件
#include <stdio.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <stdlib.h>
//HPS厂家提供的底层定义头文件
#define soc_cv_av //开发平台Cyclone V 系列
#include "hwlib.h"
#include "socal/socal.h"
#include "socal/hps.h"
//与用户具体的HPS 应用系统相关的硬件描述头文件
#include "hps_0.h"
#define HW_REGS_BASE (ALT_STM_OFST) //HPS外设地址段基地址
#define HW_REGS_SPAN (0x04000000) //HPS外设地址段地址空间 64MB大小
#define HW_REGS_MASK (HW_REGS_SPAN - 1) //HPS外设地址段地址掩码
static volatile unsigned long long *dout = NULL;
static float *img_virtual_base = NULL;
static float *b1_virtual_base = NULL;
static float *b2_virtual_base = NULL;
static float *w1_virtual_base = NULL;
static float *w2_virtual_base = NULL;
int full_init(int *virtual_base){
int fd;
void *virtual_space;
//使能mmu
if((fd = open("/dev/mem",(O_RDWR | O_SYNC))) == -1){
printf("can't open the file");
return fd;
}
//映射用户空间
virtual_space = mmap(NULL,HW_REGS_SPAN,(PROT_READ | PROT_WRITE),MAP_SHARED,fd,HW_REGS_BASE);
//得到偏移的外设地址
dout = virtual_space + ((unsigned)(ALT_LWFPGASLVS_OFST+PREDIT_0_MY_PREDIT_INTERNAL_INST_AVS_CRA_BASE)
&(unsigned)(HW_REGS_MASK));
b1_virtual_base = virtual_space + ((unsigned)(ALT_LWFPGASLVS_OFST+PREDIT_0_MY_PREDIT_INTERNAL_INST_AVS_B1_BASE)
&(unsigned)(HW_REGS_MASK));
b2_virtual_base = virtual_space + ((unsigned)(ALT_LWFPGASLVS_OFST+PREDIT_0_MY_PREDIT_INTERNAL_INST_AVS_B2_BASE)
&(unsigned)(HW_REGS_MASK));
w1_virtual_base = virtual_space + ((unsigned)(ALT_LWFPGASLVS_OFST+PREDIT_0_MY_PREDIT_INTERNAL_INST_AVS_W1_BASE)
&(unsigned)(HW_REGS_MASK));
w2_virtual_base = virtual_space + ((unsigned)(ALT_LWFPGASLVS_OFST+PREDIT_0_MY_PREDIT_INTERNAL_INST_AVS_W2_BASE)
&(unsigned)(HW_REGS_MASK));
img_virtual_base = virtual_space + ((unsigned)(ALT_LWFPGASLVS_OFST+PREDIT_0_MY_PREDIT_INTERNAL_INST_AVS_IMG_BASE)
&(unsigned)(HW_REGS_MASK));
*virtual_base = virtual_space;
return fd ;
}
int main(){
int fd,virtual_base,i;
fd = full_init(&virtual_base);
float *image[10] = {input_0,input_1,input_2,input_3,input_4,input_5,input_6,input_7,input_8,input_9};
//先将权重和偏置赋值
memcpy(w1_virtual_base,layer1_weight,784*64*sizeof(float));
memcpy(b1_virtual_base,layer1_bias,64*sizeof(float));
memcpy(w2_virtual_base,layer2_weight,64*10*sizeof(float));
memcpy(b2_virtual_base,layer2_bias,10*sizeof(float));
//一层for循环输出十张图片的值
for(i=0;i<10;i++)
{
memcpy(img_virtual_base,image[i],784*sizeof(float));
while((*(dout + 0)&(unsigned)1) != 0);
*(dout + 2) = 1;
*(dout + 3) = 1;
*(dout + 1) = 1;
while((*(dout + 3) & 0x2) == 0 );
printf("input:%d 预测结果:%d \n",i,*(dout + 4));
*(dout + 1) = 0;
}
//取消映射
//取消地址映射
if(munmap(virtual_base,HW_REGS_SPAN)==-1){
printf("取消映射失败..\n");
close(fd);
}
//关闭mmu
close(fd);
return 0;
}
保存之后编译生成二进制可执行文件。
六 调试
上板验证,这一步就偷个懒,就是连接开发板和电脑,将可执行文件复制到
/opt 目录下
给可执行文件赋予权限
chmod 777 full
之后就可以运行了。
最终可实现对28 *28 的手写体图片的识别。并显示出结果
七 参考链接
HLS的各种接口案例实现
全连接神经网络
版权归原作者 藏进小黑屋 所有, 如有侵权,请联系我们删除。