
🐱作者:一只大喵咪1201
🐱专栏:《数据结构与算法》
🔥格言:你只管努力,剩下的交给时间!

排序
在文章排序(上篇)中本喵详细讲解了,插入排序(包括直接插入排序,希尔排序),选择排序(包括直接选择排序,堆排序)和交换排序(包括冒泡排序,快速排序)。
再次看下面这张图:
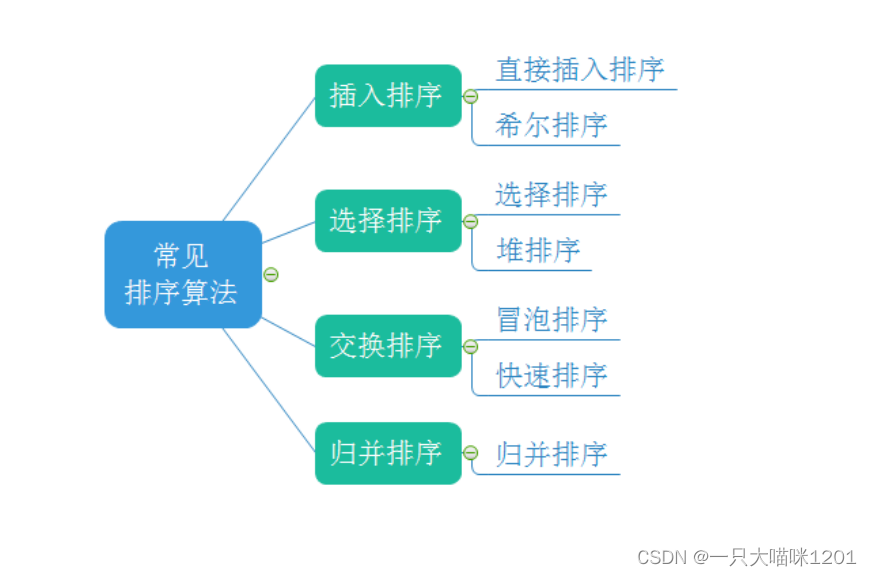
常见算法中还有一个归并排序本喵没有介绍,下面本喵就来讲解下归并排序是如何实现的。
⚽归并排序
⚾递归实现
基本思想:
- 归并排序(MERGE-SORT)是建立在归并操作上的一种有效的排序算法,该算法是采用分治法(Divide andConquer)的一个非常典型的应用。
- 将已有序的子序列合并,得到完全有序的序列;即先使每个子序列有序,再使子序列段间有序。若将两个有序表合并成一个有序表,称为二路归并。
下面本喵来讲解下上述的概念是什么意思。
该动图就是归并思想的实现过程。
- 有俩个有序的数组arr1和arr2,比较俩个数组中的元素
- 较小的元素尾插到下面的临时数组temp中,再指向下一个元素与另一数组中的元素比较大小
- 如此重复,将俩个数组中的所有元素全部尾插到temp数组中
- 此时俩个有序的数组就归并为一个有序的数组
这种思想和链表的合并有相似之处。
但是我们往往拿到的数据并不是有序的,此时就要想办法让它成为俩个有序的数组来进行合并。
我们知道,单个的数据是一定有序的,我们就可以利用递归,将一组数据拆分到单个的数据为止,然后进行归并,归并后就成了两两有序,再次归并,直到所有的数据有序,采用的是二叉树的后序遍历的思想。
同样拿上面那组数据,但是它是乱序的,如:
10 6 7 1 3 9 4 2这一组数据,将它们进行升序排列,过程如下面动图:
- 图中,猫头所走的路线就是递归的路线
- 左侧数组arr是原数组,temp是开辟的临时数组
- 使用下标将原数组采用递归的形式逐渐平分,分到俩个数组中只有1个元素的时候,进行归并
- 此时就有多个含有俩个元素的区间,再继续进行归并,直到所有元素升序排列。
代码实现:
看看用代码是如何实现上诉过程的:
staticvoid_MergeSort(int* a,int left,int right,int* temp){//结束条件,只有一个元素时返回if(left >= right)return;int mid =(right - left)/2+ left;//求中间元素下标//按区间[left,mid][mid+1,right]递归_MergeSort(a, left, mid, temp);_MergeSort(a, mid +1, right, temp);//归并int left1 = left, right1 = mid;int left2 = mid +1, right2 = right;int i = left;//比较将元素按照升序放在临时数组中while(left1 <= right1 && left2 <= right2){if(a[left1]<= a[left2]){
temp[i++]= a[left1++];}else{
temp[i++]= a[left2++];}}//一定有一个区间没有比较完,直接复制到临时数组中while(left1 <= right1){
temp[i++]= a[left1++];}while(left2 <= right2){
temp[i++]= a[left2++];}//拷贝回原数组memcpy(a + left, temp + left,(right - left +1)*sizeof(int));}//归并排序voidMergeSort(int* a,int n){//开辟临时空间int* temp =(int*)malloc(n *sizeof(int));if(temp ==NULL){perror("malloc fail");return;}//归并排序_MergeSort(a,0, n -1, temp);//释放空间free(temp);
temp =NULL;}
可以看到,成功的将这组数字按照升序排列。
注意:
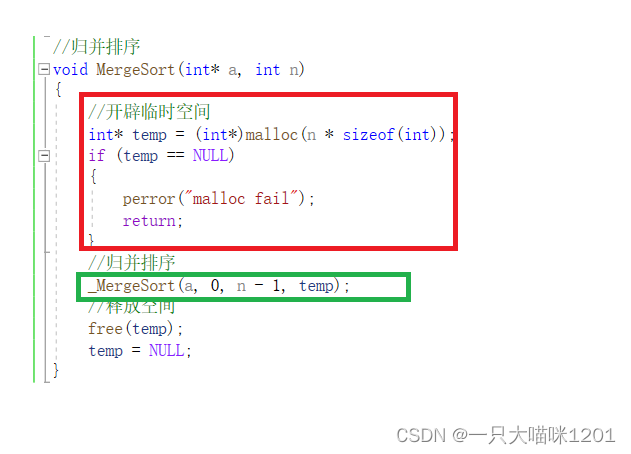
递归必须在另一个函数中实现,因为我们开辟了一组动态空间作为temp临时数组,如果递归不在另一个函数中实现,就会每递归调用一次该函数就开劈一次动态空间,造成空间的浪费。
- 通常在函数名前面加下划线_表示该函数的子函数。
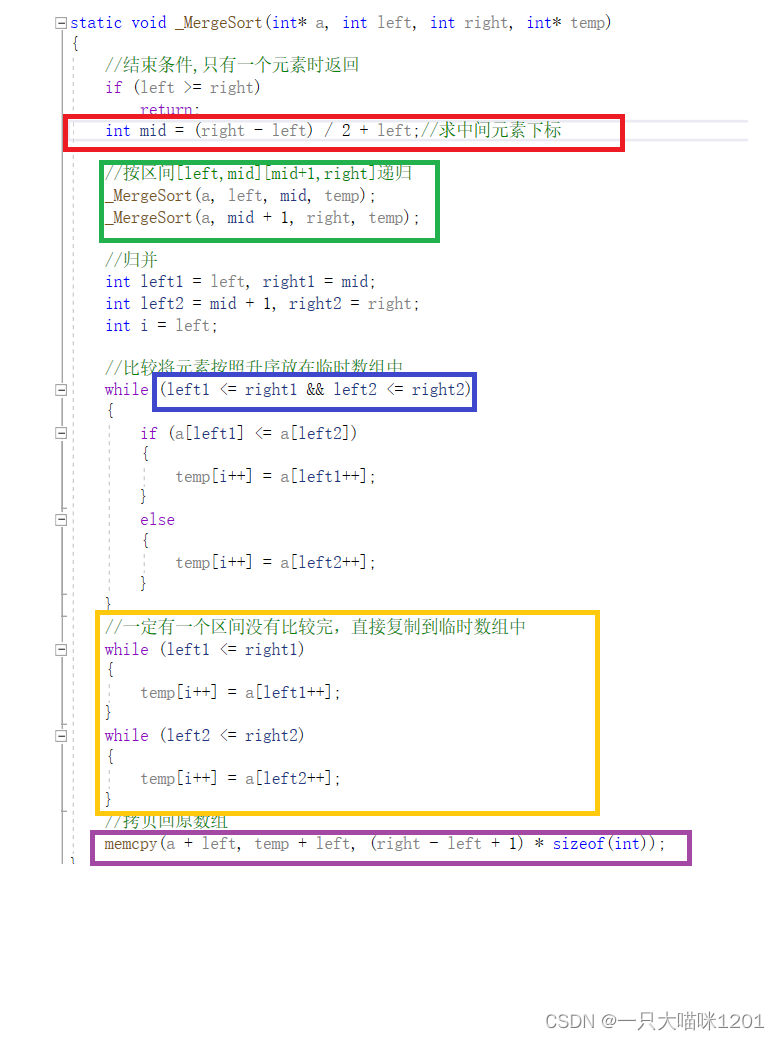
- 红色框中是将一个数组分为俩个区间,[left , mid]和[mid+1 , right]
- 绿色框中就是递归调用的过程
- 蓝色框中是归并的过程的控制条件,在上面分为了俩个区间,在归并过程中记为[left1 , right1]和[left2 , right2]。 在归并中,一定是有一个区间中的元素全部放在零时数组中,一个区间中还剩有元素。 所以只要一个区间空了就要跳出循环归并。
- 黄色框只,由于我们并不直到是哪个区间中的元素还有剩余,所以进行俩个循环判断,符合就进循环,进去后将该区间中剩余的有序元素放在临时数组中
- 紫色框中是每归并完俩个区间后,将临时数组中的元素再拷贝回原来的数组,此时原数组中拷贝进来的元素就是有序的。
下面动图展示了数据的位置变化:
⚾非递归实现
上面是使用递归实现的归并排序,也是大多数情况下所使用到的,和快速排序一样,归并排序同样可以使用非递归的方法,这样就可以避免栈溢出。
基本思想:
- gap = 1
将待排数据分为多个区间,每个区间中只有一个数据,每俩个区间形成一对,进行一次归并排序,假设一共有n个数据,此时就需要归并n/2次,其中gap表示区间中数据的个数。
如上面动图所演示,当归并n/2次以后,每俩个数所形成的新区间就是有序的。
- gap = 2
将gap = 1归并完成的待排数据,再分为多个区间,每个区间中有俩个数据,每俩个区间形成一对,进行一次归并排序,此时就需要归并n/4次。
如上面动图所演示,当归并n/4次以后,每4个数所形成的新区间就是有序的。
- gap = 4
将gap = 2归并完成的待排数据,再分为多个区间,每个区间中有4个数据,每俩个区间形成一对,进行一次归并排序,此时就需要归并n/8次。
如上面动图所演示,当归并n/8次以后,每8个数所形成的新区间就是有序的。
- gap = 8
如此重复,直到gap等于待排数据的个数为止,用前面的例子就是当gap等于8的时候停止。
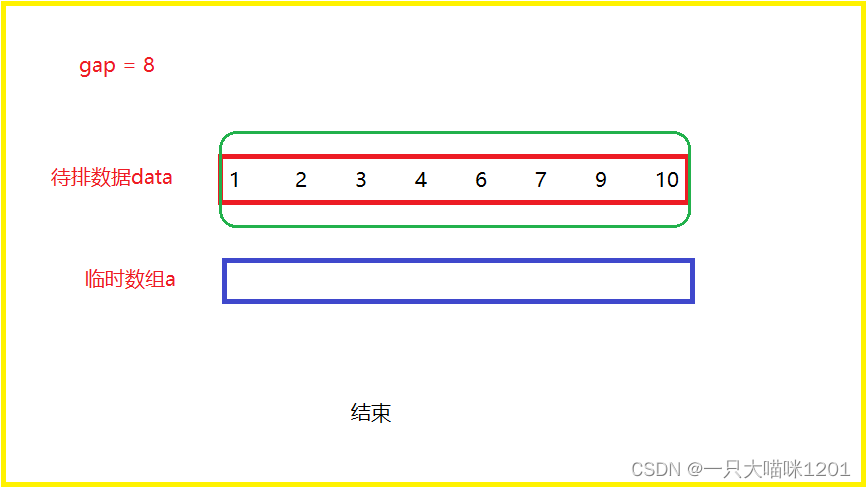
此时归并停止,并且数据已经按照升序排列好了。
代码实现:
//归并排序非递归voidMergeSortNonR(int* a,int n){//开辟临时空间int* temp =(int*)malloc(sizeof(int)* n);if(temp ==NULL){perror("malloc fail");return;}//归并int gap =1;while(gap < n){int i =0;for(int j =0; j < n; j +=2* gap){int left1 = j, right1 = j + gap -1;int left2 = j + gap, right2 = j +2* gap -1;//比较将元素按照升序放在临时数组中while(left1 <= right1 && left2 <= right2){if(a[left1]<= a[left2]){
temp[i++]= a[left1++];}else{
temp[i++]= a[left2++];}}//一定有一个区间没有比较完,直接复制到临时数组中while(left1 <= right1){
temp[i++]= a[left1++];}while(left2 <= right2){
temp[i++]= a[left2++];}//拷贝回原数组memcpy(a + j, temp + j,(2* gap)*sizeof(int));}
gap *=2;}//释放动态空间free(temp);
a =NULL;}
可以看到,已经实现了升序排列。
缺陷修复:
但是将上面那组待排数据稍加修改后我们再看效果,修改后的数据为:10 6 7 1 3 9 4 2 5,我们再看运行结果:
可以看到,程序直接崩了,这是什么原因呢?
我们只是将原本的待排数据又增加了一个,原本偶数个数据变成了奇数个数据,是奇数的原因吗?
我们在将待排数据增加一个,10 6 7 1 3 9 4 2 5 6,再看运行结果:
程序同样是崩溃的,说明和待排数据的个数是奇数个还是偶数个是没有必然关系的。
我们将每次归并的区间打印出来
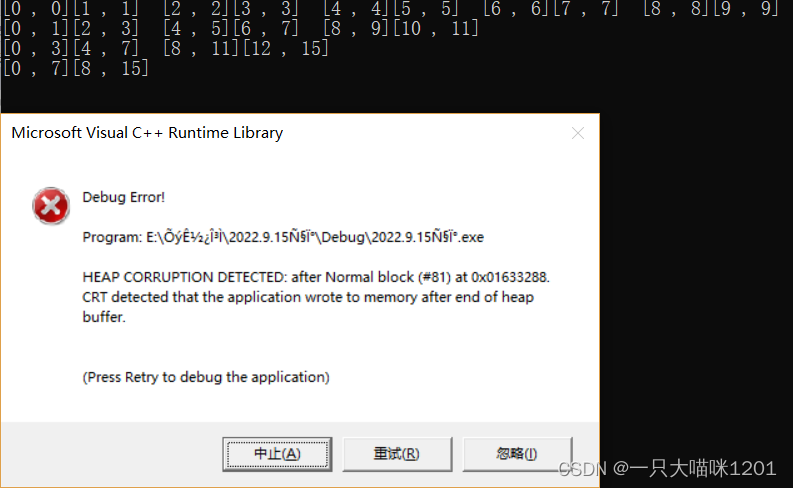
虽然程序是崩溃的,但是我还是可以看到归并的区间,下面就来分析一下这些归并的区间。
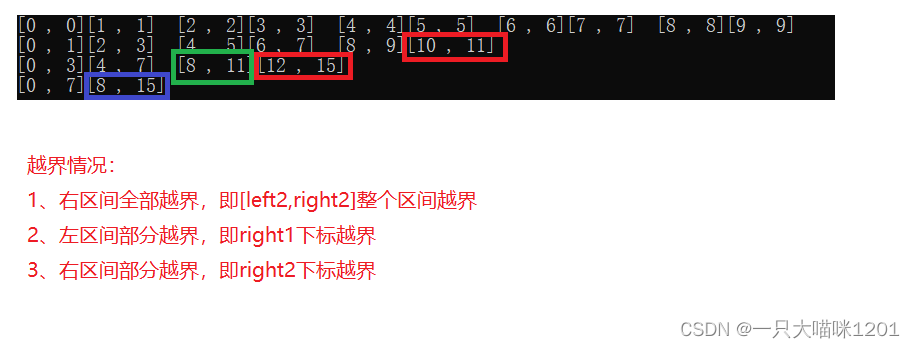
- 其中被框住的区间是存在越界的区间,它们的越界情况也无非就是上图中所写的3种,只要对这三种情况进行控制就可以了
- 右区间全部越界,此时的left2肯定是大于等于n(待排数据个数的),所以就没有存在的必要,我们也就不对右区间进行归并了。
- 左区间部分越界,此时的right1肯定是大于等于n的,并且右区间肯定也是越界的,所以就没有存在的必要,我们也就不对右区间进行归并了
- 右区间部分越界,此时的right2肯定是大于等于n的,只需要将right1修正到n-1
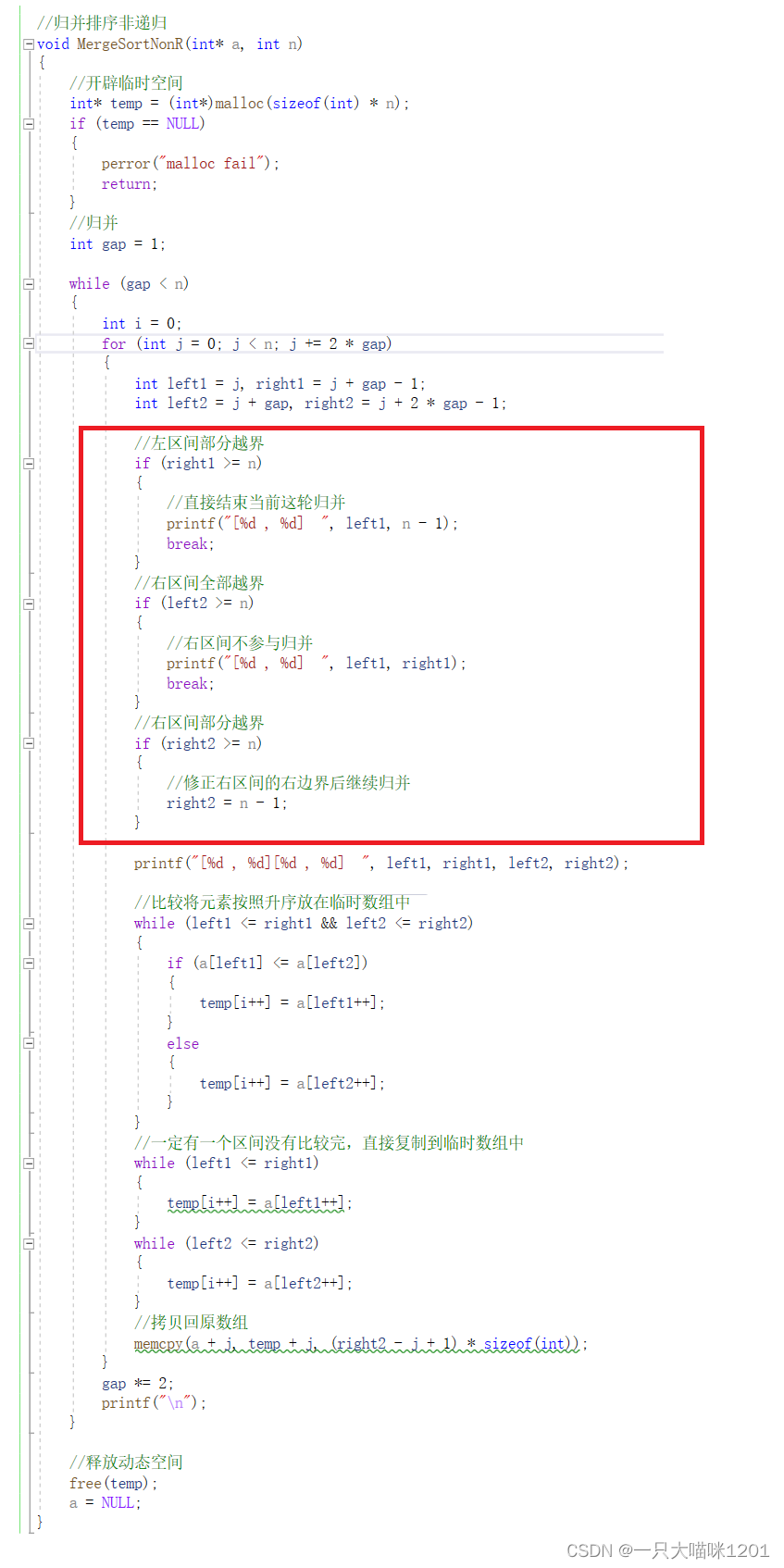
红色框中的内容就是对越界情况的修正。
此时就可以达到我们排序的目的了: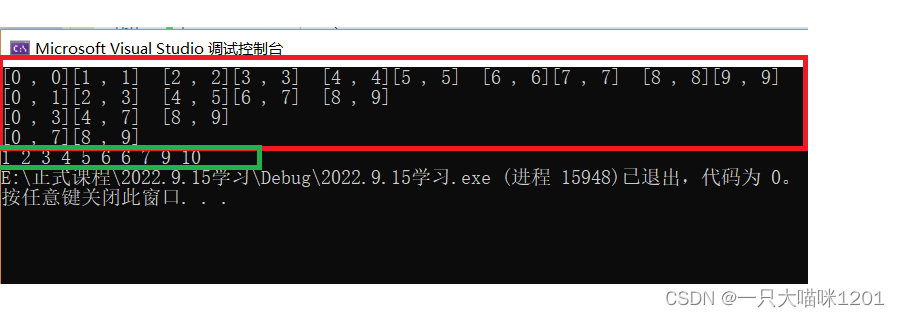
红色框中是进行归并的区间,绿色框中是待排数据按照升序排列后的结果。
⚽常见排序算法的复杂度和稳定性分析
⚾稳定性
- 稳定性:假定在待排序的记录序列中,存在多个具有相同的关键字的记录,若经过排序,这些记录的相对次序保持不变,即在原序列中,r[i]=r[j],且r[i]在r[j]之前,而在排序后的序列中,r[i]仍在r[j]之前,则称这种排序算法是稳定的;否则称为不稳定的。
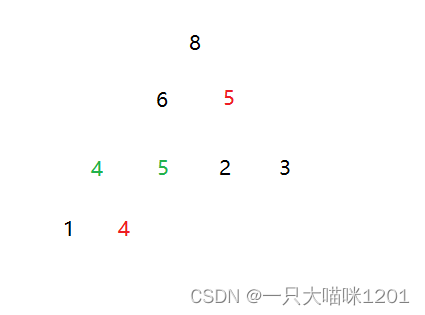
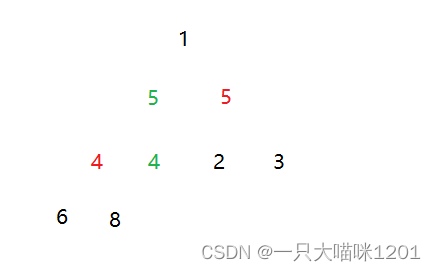
例如这样一组数据5 6 8 4 5 2 3 1 4,将相同关键字用不同颜色标记出来。

- 在排序之前,红色的5在绿色的5之前
- 红色的4在绿色的4之前
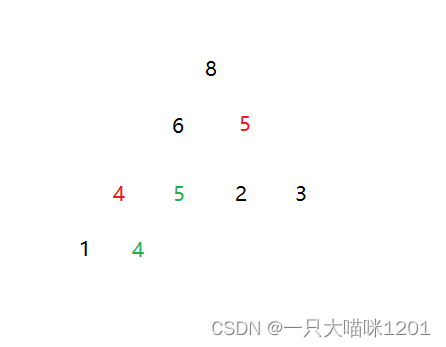
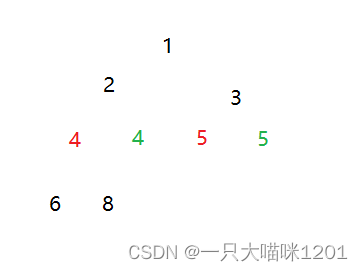
首先用归并排序按照升序来排列一下这组数据。

排好之后,该组数据变成了升序排列。并且
- 红色的5仍然在绿色的5之前
- 红色的4仍然在绿色的4之前
这样的排序算法,我们称之为稳定的排序算法。
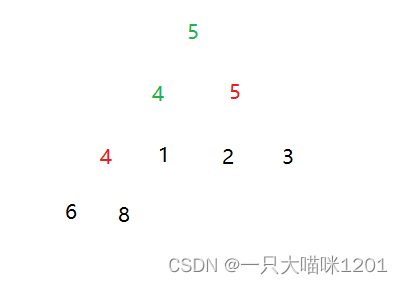
同样是这组数据,我们用堆排序升序排列。
在向下调整建立大根堆的过程中,如果关键小于等于子节点时交换,那么在建堆的过程中就造成了不稳定。
在向下调整建立大根堆的过程中,如果关键小于子节点时交换,那么在建堆后的数据仍然是稳定的。
我们使用建堆后仍然稳定的大根堆进行排序。
在交换堆顶和最后一个元素后进行向下调整时,通过控制,进来保证数据的稳定,让红色关键字放在绿色关键字之后,因为堆顶元素会去数组的最后面。
交换后并且进行向下调整后。
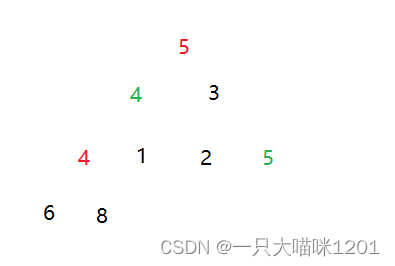
虽然这里可以通过控制将红色关键字放在绿色关键字前面,这是由于我们可以直观的看到关键字的颜色,从而进行控制。
而在编写程序过程中,我们是不知道关键字的颜色的,所以也无法控制它们的相对位置,所以堆排序是不稳定的。
现在已经知道了稳定性指的是什么,接下来我们分析一下这些常用排序算法的优略,通过复杂度和稳定性。
⚾具体分析
- 插入排序
直接插入排序:
- 通过直接插入排序的思想我们知道,该算法最好情况下的时间复杂度是O(N),此时数据是非常有序的,最坏情况的时间复杂度是O(N2),此时数据是逆序的,空间复杂度是O(1)。
- 只需要控制end+1指向的元素放在[begin , end]区间与之相等的元素后面,该算法中关键字的相对位置就不会发生变化,所以该算法是稳定的。
希尔排序:
- 通过上篇文章中堆希尔排序的分析,该算法的平均时间复杂度是O(N1.3),空间复杂度是O(1)。
- 由于相同的关键字可能会因为不同的间隙gap分在不同的组中,所以相对位置就会发生改变,而且像堆排序一样,我们在写程序的时候不知道关键字的相对位置,所以无法像直接插入排序那样只需要通过简单的控制就能稳定,所以该算法是不稳定的。
- 选择排序
直接选择排序:
- 通过直接选择排序的思想我们知道,该算法是不分好坏情况的,它的时间复杂的是O(N2),空间复杂度是O(1)。
很容易有一个误区,认为该算法是稳定的,其实它是不稳定的,我们来看这样一组数据:
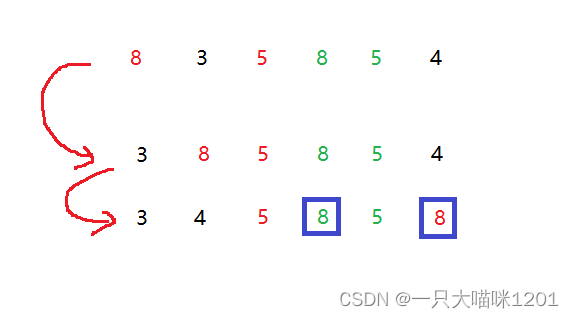
- 关键字5的相对位置是不会改变,但是关键字8的相对位置在无意中已经改变了,而且是无法控制的,所以直接选择排序是不稳定的。
堆排序:
- 根据堆排序的思想我们知道,建堆的过程时间复杂度是O(N),每交换一次堆顶和最后一个元素后向下调整的时间复杂度是O(logN),因为二叉树的高度是logN,一共有N个元素,所以堆排序的时间复杂度是O(N*logN),不区分最好和最坏的情况。空间复杂度是O(1),在原来的物理空间上操作。
- 在讲解稳定性的概念时本喵就分析过,堆排序是不稳定的。
- 交换排序:
冒泡排序:
- 根据冒泡排序的思想,最好情况也就是非常有序时,时间复杂度是O(N),只需要进行一趟就可以,最坏情况是逆序时,时间复杂度是O(N2),空间复杂度是O(1),是在原来空间上进行操作的。
- 只需要控制相等的关键字不发生交换,就可以达到稳定,所以该算法是稳定的。
快速排序:
- 根据快速排序的思想,无论采用hore版本,还是挖坑法,亦或是前后指针法,key位置如果选最左边的数据或者最右边的数据,在递归时,二叉树的深度是N,每层进行一趟,将一个数放在它所属的位置,需要进行N次交换,所以最坏情况下的时间复杂度是O(N2),最好情况是将key位置采用三数取中或者随机取值的方法,此时递归的二叉树高度是logN,最好情况的时间复杂度是O(N*logN),
- 由于递归在调用函数的过程中开创建栈帧,又因为函数的栈帧空间是可以重复利用的,所以空间复杂度是O(N)。
- 由于每趟快排中,key位置的元素最后的位置是不确定的,也无法进行控制,所以该算法是不稳定的。
- 归并排序
- 根据归并排序的思想,递归二叉树的高度是logN,每一层都需要进行N次归并,将数据按照大小关系尾插到临时数组中,所以该算法的时间复杂度是O(N*logN),由于需要开辟临时数组,所以空间复杂度是O(N)。
- 只需在归并的过程中,将左边区间和右边区间中的相同关键字按照先尾插左边关键字,再尾插右边关键字的顺序,就可以使该算法稳定,所以该算法是稳定的。
上诉内容可以总结为下面的表格:
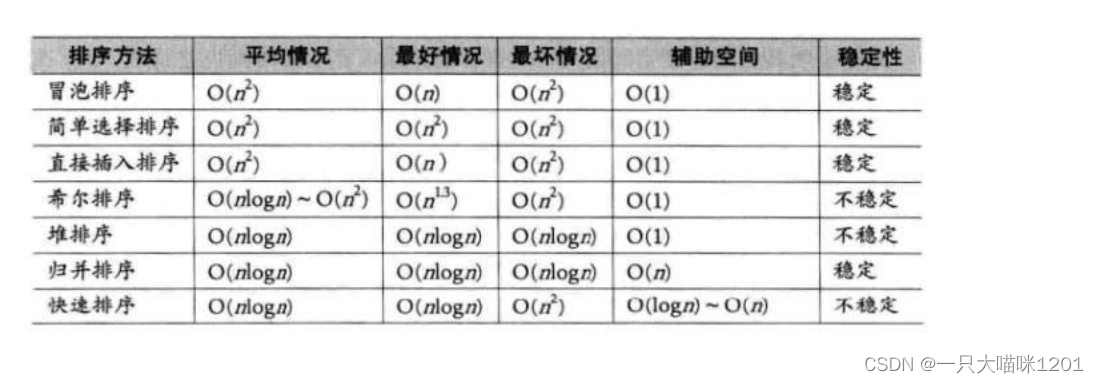
只要理解了这几种算法是思想,它们的时间复杂度和空间复杂度以及稳定性是很容易得出的。
⚽非比较排序
上面所讲述的排序方法都是通过比较俩个数的大小,再移动相应的数据达到目的的,属于比较排序的范畴,当然,还有一些非比较排序,这里本喵介绍俩个。
⚾计数排序
思想:
计数排序又称为鸽巢原理,是对哈希直接定址法的变形应用,将待排数据中的每一个数据都映射一个地址,地址所对应的数据出现一次,将该地址中的内容加1,最后按照地址中数据的个数将数据还原到原来的数组。
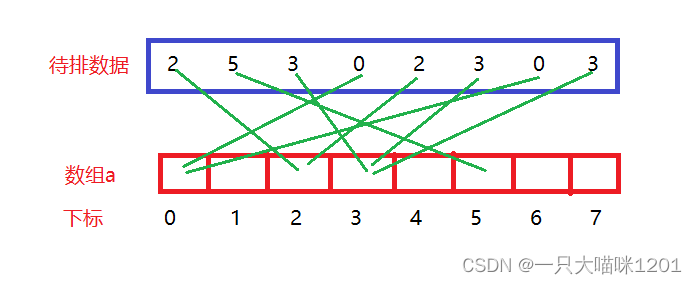
- 蓝色框中是待排数据,红色框是创建的一个数组,也就是映射的地址
- 待排数据中的每一个数据都对应一个数组中的地址
- 得出数据映射在数组中的下标后,该数据每出现一次,数组中该下标位置的内容加1,当然,数组a要全部初始化为0。
- 当待排数据全部映射到数组a中后,遍历数组中的元素,当数组中某下标i中的内容不是0时,说明映射的数存在
- 数组中不为0的位置中,数字是多少,就在原数据空间中按顺序覆盖多少个映射的数据。
- 当数组遍历完后,待排数据也就排好了。
这种方法中,每一个待排数据都有一个映射地址,也就是对应一个数组元素,而且数组中的下标是从0开始的,这样的映射被叫做绝对映射。如果待排数据是
这样一组数据呢?映射的数组的下标还是从0开始吗?如果从0开始会造成空间浪费,所以我们需要开辟一个(max - min + 1)个空间的数组进行映射,其中max和min是待排数据的最大值和最小值。
- 设待排数据中的最小数据是min,则待排数据中的任意一个数据在数组中映射的下标是data-min。
- 反求待排数据的关系是(下标i+待排数据的最小值min)。
- 其他操作同绝对映射一样。
这样开辟一个范围的数组进行映射的方式称为相对映射。
我们将上面举列中的这组数据100 105 110 120 100 105 105进行升序排列。
分析:
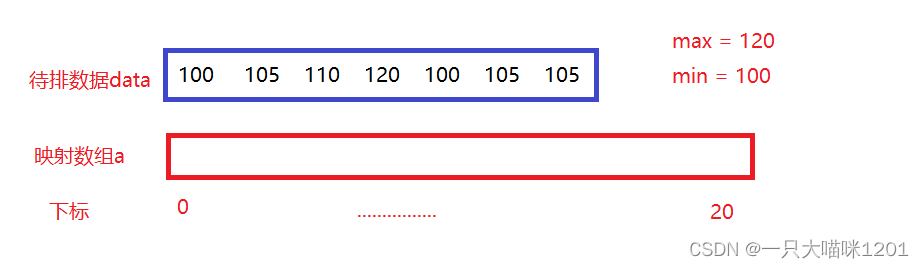
- 待排数据data中的最大值max=120,最小值min=100
- 开辟大小为(max - min + 1)个元素大小的数组a,并且初始化为0
- 遍历待排数据data,每个数都在映射的数组中加1,也就是a[data[i]-min]++
- 当data遍历结束后,开始遍历数组a,只要a中某位置的元素不为0,就将对应下标i所映射的data中的数据(i + min)按顺序覆盖到原数组中
- 当数组a遍历结束后,原数组中的数据就按照升序排列好了。
代码实现:
//计数排序voidCountSort(int* data,int n){//寻找待排数据中的最小值和最大值int max = data[0];int min = data[0];for(int i =0; i < n; i++){if(data[i]> max)
max = data[i];if(data[i]< min)
min = data[i];}//开辟映射数组int range = max - min +1;int* a =(int*)malloc(sizeof(int)* range);if(a ==NULL){perror("malloc fail");return;}memset(a,0,sizeof(int)* range);//初始化为0//进行映射,个数统计for(int i =0; i < n; i++){
a[data[i]- min]++;}//排序int j =0;for(int i =0; i < range; i++){while(a[i]--){
data[j++]= i + min;//按照升序覆盖到原数组中}}//释放空间free(a);
a =NULL;}
可以看到,成功的将该组数据按照升序排列了。
而且该算法可以实现负数的排序,因为相对映射得出的是一个相对值,是肯定大于等于0的。
注意:
- 时间复杂度和空间复杂度
时间复杂度:
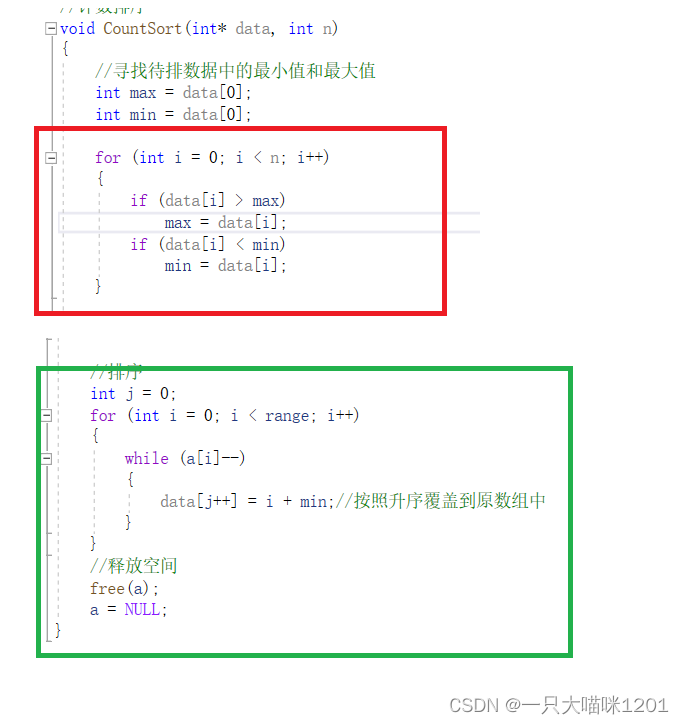
- 红色框中是寻找最大值和最小值的程序,该部分的时间复杂度是O(N)
- 绿色框中是遍历数组将映射值按升序还原到原数组中的程序,虽然是俩个循环,但是操作的数据一共是N个,所以该部分的时间复杂度是O(range)
- 所以计数排序算法的时间复杂度是O(N + range)
- 当range小于等于N的时候,该算法的时间复杂度就是O(N)
- 所以该算法的时间复杂度是取决于range的大小的,而range又取决于待排数据的离散程度,数据越离散,它的最大值和最小值的差就越大,所以对应的range也就越大。
- 所以说,计数排序适合用于待排数据比较紧凑的情况。
空间复杂度:
- 该算法开辟了range个临时空间作为待排数据的映射地址,所以空间复杂度就是O(range)
- 稳定性
- 根据该算法的思想,它在按照映射数组还原待排数据的时候,是按照i + min的关系覆盖到原数组中的,这个过程中无法控制关键字的相对顺序,所以该算法也是不稳定的。
- 弊端
- 在开辟作为映射地址的数组时,该数组的大小是根据待排数据中最大值和最小值之差确定的,所以待排数据只能是整型家族的数据
- 如果是字符串或者浮点型数据,是无法开辟出合适的映射数组的
- 所以说,计数排序只适用于整型数据的排序
⚽总结
上面内容加排序(上篇)便是常用的几种排序,重点在于理解各种排序方法的思想,从而知道它们的适用场景,在合适的场景中使用合适的排序方法可以提高程序的效率。在不知道用什么排序的时候,可以使用快排,俗话说,遇事不决用快排。
版权归原作者 一只大喵咪1201 所有, 如有侵权,请联系我们删除。