
URDF练习
需求描述:
创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱动轮和两个万向支撑轮组成,两个驱动轮半径为 3.25cm,轮胎宽度1.5cm,两个万向轮为球状,半径 0.75cm,底盘离地间距为 1.5cm(与万向轮直径一致)
实现流程:
创建机器人模型可以分步骤实现
新建 urdf 文件,并与 launch 文件集成
搭建底盘
在底盘上添加两个驱动轮
在底盘上添加两个万向轮
添加项目辅助包
urdf xacro
查看工作文档目录
创建一个机器人模型:semo02_date.urdf.xacro
<!--
使用 xacro 优化 URDF 版的小车底盘实现:
实现思路:1.将一些常量、变量封装为 xacro:property
比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 ....2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮
--><!-- 根标签,必须声明 xmlns:xacro --><robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- 封装变量、常量 --><xacro:property name="PI"value="3.141"/><!-- 宏:黑色设置 --><material name="black"><color rgba="0.0 0.0 0.0 1.0"/></material><!-- 底盘属性 --><xacro:property name="base_footprint_radius"value="0.001"/><!-- base_footprint 半径 --><xacro:property name="base_link_radius"value="0.1"/><!-- base_link 半径 --><xacro:property name="base_link_length"value="0.08"/><!-- base_link 长 --><xacro:property name="earth_space"value="0.015"/><!-- 离地间距 --><!-- 底盘 --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}"/></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="yellow"><color rgba="0.5 0.3 0.0 0.5"/></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint"/><child link="base_link"/><origin xyz="0 0 ${earth_space + base_link_length / 2 }"/></joint><!-- 驱动轮 --><!-- 驱动轮属性 --><xacro:property name="wheel_radius"value="0.0325"/><!-- 半径 --><xacro:property name="wheel_length"value="0.015"/><!-- 宽度 --><!-- 驱动轮宏实现 --><xacro:macro name="add_wheels"params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0"/><material name="black"/></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link"/><child link="${name}_wheel"/><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }"/><axis xyz="0 1 0"/></joint></xacro:macro><xacro:add_wheels name="left" flag="1"/><xacro:add_wheels name="right" flag="-1"/><!-- 支撑轮 --><!-- 支撑轮属性 --><xacro:property name="support_wheel_radius"value="0.0075"/><!-- 支撑轮半径 --><!-- 支撑轮宏 --><xacro:macro name="add_support_wheel"params="name flag"><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="black"/></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link"/><child link="${name}_wheel"/><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}"/><axis xyz="1 1 1"/></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1"/><xacro:add_support_wheel name="back" flag="-1"/></robot>
创建摄像头xacro 文件:semo03_date.urdf.xacro
<!-- 摄像头相关的 xacro 文件 --><robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length"value="0.01"/><!-- 摄像头长度(x)--><xacro:property name="camera_width"value="0.025"/><!-- 摄像头宽度(y)--><xacro:property name="camera_height"value="0.025"/><!-- 摄像头高度(z)--><xacro:property name="camera_x"value="0.08"/><!-- 摄像头安装的x坐标 --><xacro:property name="camera_y"value="0.0"/><!-- 摄像头安装的y坐标 --><xacro:property name="camera_z"value="${base_link_length / 2 + camera_height / 2}"/><!-- 摄像头安装的z坐标:底盘高度 /2+ 摄像头高度 /2--><!-- 摄像头关节以及link --><link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link"/><child link="camera"/><origin xyz="${camera_x} ${camera_y} ${camera_z}"/></joint></robot>
创建雷达xacro 文件:semo_04_date.urdf.xacro
<!--
小车底盘添加雷达
--><robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 雷达支架 --><xacro:property name="support_length"value="0.15"/><!-- 支架长度 --><xacro:property name="support_radius"value="0.01"/><!-- 支架半径 --><xacro:property name="support_x"value="0.0"/><!-- 支架安装的x坐标 --><xacro:property name="support_y"value="0.0"/><!-- 支架安装的y坐标 --><xacro:property name="support_z"value="${base_link_length / 2 + support_length / 2}"/><!-- 支架安装的z坐标:底盘高度 /2+ 支架高度 /2--><link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/><material name="red"><color rgba="0.8 0.2 0.0 0.8"/></material></visual></link><joint name="support2base_link" type="fixed"><parent link="base_link"/><child link="support"/><origin xyz="${support_x} ${support_y} ${support_z}"/></joint><!-- 雷达属性 --><xacro:property name="laser_length"value="0.05"/><!-- 雷达长度 --><xacro:property name="laser_radius"value="0.03"/><!-- 雷达半径 --><xacro:property name="laser_x"value="0.0"/><!-- 雷达安装的x坐标 --><xacro:property name="laser_y"value="0.0"/><!-- 雷达安装的y坐标 --><xacro:property name="laser_z"value="${support_length / 2 + laser_length / 2}"/><!-- 雷达安装的z坐标:支架高度 /2+ 雷达高度 /2--><!-- 雷达关节以及link --><link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/><material name="black"/></visual></link><joint name="laser2support" type="fixed"><parent link="support"/><child link="laser"/><origin xyz="${laser_x} ${laser_y} ${laser_z}"/></joint></robot>
组合底盘摄像头与雷达的 xacro 文件:car.urdf.xacro
<!-- 组合小车底盘与摄像头与雷达 --><robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="semo02_date.urdf.xacro"/><xacro:include filename="semo03_date.urdf.xacro"/><xacro:include filename="semo_04_date.urdf.xacro"/></robot>
创建launch 文件:car_ee.launch
<launch><param name="robot_description" command="$(find xacro)/xacro $(find urdlee)/urdf/xacro/car.urdf.xacro"/><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdlee)/config/showmycar.rviz"/><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen"/><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen"/><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen"/><node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen"><rosparam file="$(find urdlee)/config/control.yaml" command="load"/><param name="sim"value="true"/></node></launch>
上面使用的 /config/control.yaml
添加 arbotix 所需的配置文件:control.yaml
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....# 因此,根 name 是 controller
controllers:{# 单控制器设置
base_controller:{#类型: 差速控制器
type: diff_controller,#参考坐标
base_frame_id: base_footprint,#两个轮子之间的间距
base_width:0.2,#控制频率
ticks_meter:2000,#PID控制参数,使机器人车轮快速达到预期速度
Kp:12,Kd:12,Ki:0,Ko:50,#加速限制
accel_limit:1.0}}
上面使用的:showmycar.rviz"
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdlee)/config/showmycar.rviz"/>
中的showmycar.rviz代码
Panels:- Class: rviz/Displays
Help Height:78
Name: Displays
Property Tree Widget:
Expanded:-/Global Options1
-/Status1
-/RobotModel1
-/RobotModel1/Status1
Splitter Ratio:0.5Tree Height:719- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:-/2D Pose Estimate1
-/2D Nav Goal1
-/Publish Point1
Name: Tool Properties
Splitter Ratio:0.5886790156364441- Class: rviz/Views<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdlee)/config/showmycar.rviz"/>
Expanded:-/Current View1
Name: Views
Splitter Ratio:0.5- Class: rviz/Time
Name:Time
SyncMode:0
SyncSource:""
Preferences:
PromptSaveOnExit:true
Toolbars:
toolButtonStyle:2Visualization Manager:
Class:""
Displays:- Alpha:0.5Cell Size:1
Class: rviz/Grid
Color:160;160;164
Enabled:trueLine Style:Line Width:0.029999999329447746
Value:Lines
Name: Grid
Normal Cell Count:0
Offset:
X:0
Y:0
Z:0
Plane: XY
Plane Cell Count:10Reference Frame:<Fixed Frame>
Value:true- Alpha:1
Class: rviz/RobotModel
Collision Enabled:false
Enabled:true
Links:
All Links Enabled:true
Expand Joint Details:false
Expand Link Details:falseExpand Tree:false
Link Tree Style: Links in Alphabetic Order
base_link:
Alpha:1Show Axes:falseShow Trail:false
Value:true
Name: RobotModel
Robot Description: robot_description
TF Prefix:""Update Interval:0
Value:trueVisual Enabled:true
Enabled:trueGlobal Options:Background Color:48;48;48Default Light:trueFixed Frame: base_link
Frame Rate:30
Name:root
Tools:- Class: rviz/Interact
Hide Inactive Objects:true- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Theta std deviation:0.2617993950843811
Topic:/initialpose
X std deviation:0.5
Y std deviation:0.5- Class: rviz/SetGoal
Topic:/move_base_simple/goal
- Class: rviz/PublishPoint
Single click:true
Topic:/clicked_point
Value:true
Views:
Current:
Class: rviz/Orbit
Distance:10
Enable Stereo Rendering:
Stereo Eye Separation:0.05999999865889549
Stereo Focal Distance:1
Swap Stereo Eyes:false
Value:false
Field of View:0.7853981852531433Focal Point:
X:0
Y:0
Z:0
Focal Shape Fixed Size:true
Focal Shape Size:0.05000000074505806
Invert Z Axis:false
Name: Current View
Near Clip Distance:0.009999999776482582
Pitch:0.5103980302810669Target Frame:<Fixed Frame>
Yaw:5.4685821533203125
Saved:~Window Geometry:
Displays:
collapsed:false
Height:1016
Hide Left Dock:false
Hide Right Dock:falseQMainWindow State: 000000ff00000000fd0000000400000000000001560000035afc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d0000035a000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f0000035afc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003d0000035a000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007380000003efc0100000002fb0000000800540069006d0065010000000000000738000003bc00fffffffb0000000800540069006d00650100000000000004500000000000000000000004c70000035a00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed:false
Time:
collapsed:falseTool Properties:
collapsed:false
Views:
collapsed:false
Width:1848
X:72
Y:27
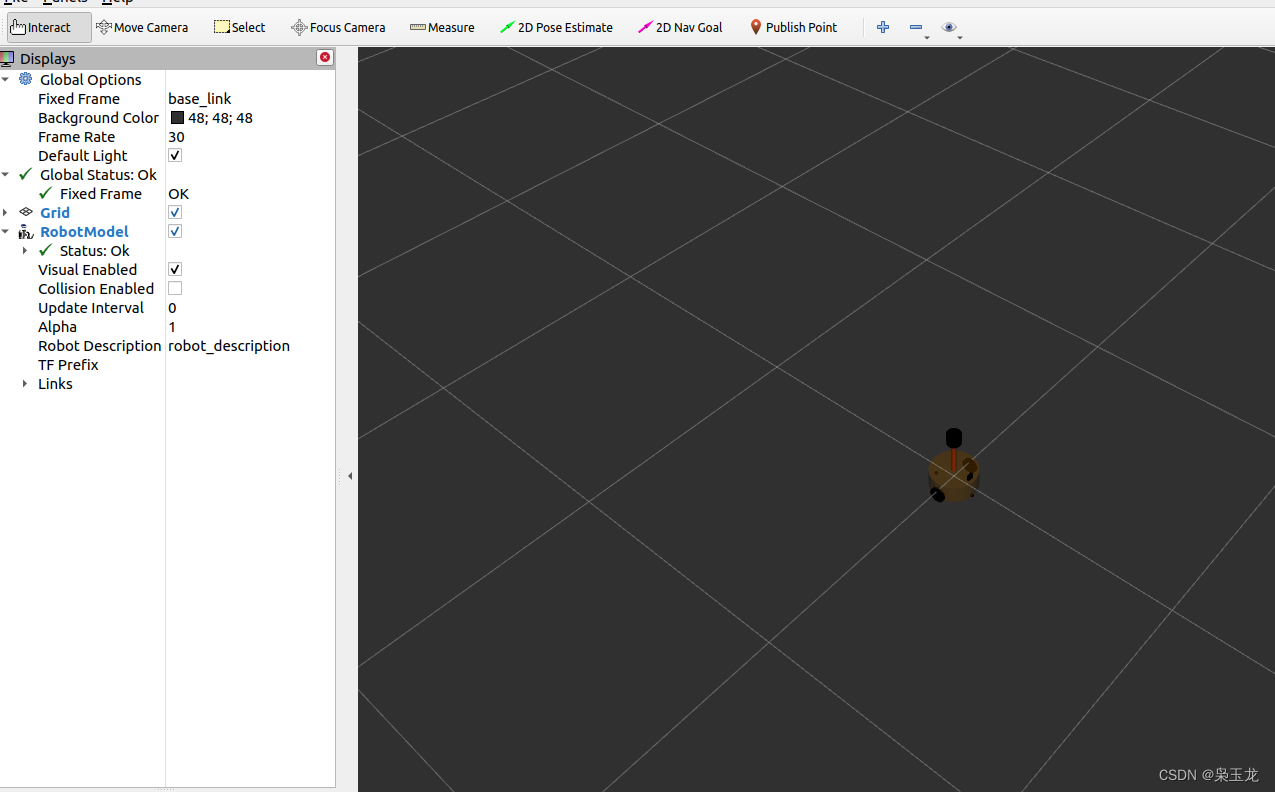
使用命令运行
source ./devel/setup.bash
roslaunch urdlee car_ee.launch
查看节点命令:rostopic list
/clicked_point
/cmd_vel
/diagnostics
/initialpose
/joint_states
/move_base_simple/goal
/odom
/rosout
/rosout_agg
/tf
/tf_static
使用:odom运行小车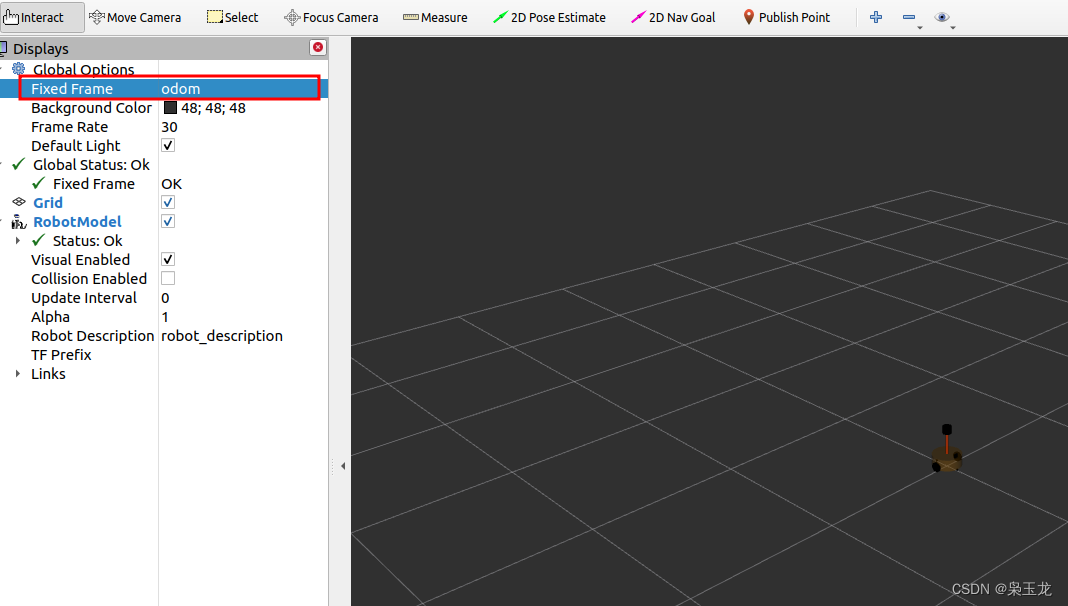
运行命令
代码自动运行
rostopic pub -r 10/cmd_vel geometry_msgs/Twist '{linear:{x:0.2,y:0,z:0},angular:{x:0,y:0,z:0.5}}'
键盘手动运行
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
本文转载自: https://blog.csdn.net/qq_46107892/article/details/130216051
版权归原作者 枭玉龙 所有, 如有侵权,请联系我们删除。
版权归原作者 枭玉龙 所有, 如有侵权,请联系我们删除。