
在一个实际的控制系统中,不确定性是不可避免的。不确定度可分为扰动信号和动态扰动两类。前者包括输入和输出干扰(如飞机上的阵风)、传感器噪声和执行器噪声等。后者表示数学模型与系统在运行中的实际动力学之间的差异。任何真实系统的数学模型总是只是系统动力学的真实物理现实的近似。这种差异的典型来源包括未建模(通常是高频)动力学、建模中被忽视的非线性、故意简化模型的影响,以及由于环境变化和磨损因素引起的系统参数变化。这些建模错误可能会对控制系统的稳定性和性能产生不利影响。
加性不确定性表示说明了实际动力学和名义模型之间的绝对误差,而乘法表示说明了相对误差。
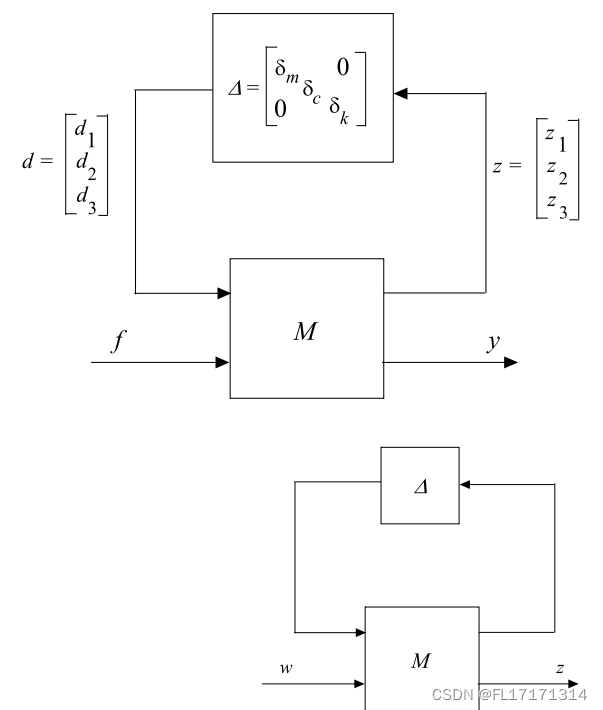
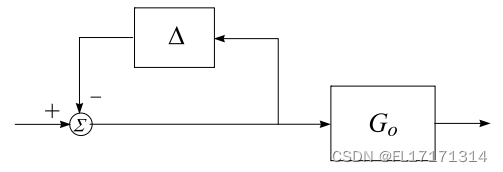
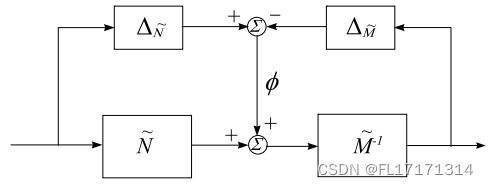
不确定性将包括非结构化的不确定性,如未建模的动力学,以及参数的变化。所有这些不确定的部分仍然可以从动力学中去除,整个系统可以重新排列为(上)线性分数阶变换F(M,Δ)的标准配置。不确定块Δ将具有以下一般形式:
sys = tf(1,[1 1]);
p = ureal('p',1);
D = ultidyn('Delta',[1 1]);
usys = p*sys*(1 + 0.1*D);
考虑的不确定性将包括非结构化的不确定性,如未建模的动力学,以及参数的变化。
Delta1 = ultidyn(’Delta1’,[1 1]);
Delta2 = ultidyn(’Delta2’,[1 1]);
W = blkdiag(W1,W2);
Delta = blkdiag(Delta1,Delta2);
G = Gnom*(eye(2) + Delta*W)
通过构建具有不确定系数(ureal或ucomplex)块、不确定动态(ultidyn块)或两者兼有的状态空间模型来构建不确定控制对象P。
不确定控制设计块,如ureal和ultidyn块,代表装置的不确定部件。
ureal不确定元来表示其值不确定的实数。一个不确定的实参数有一个标称值,存储在ominalValue属性中,还有一个不确定性,即与标称值的潜在偏差。
usys = ucover(Parray,Pnom,ord)返回一个标称值为Pnom的不确定模型usys,其行为范围包括LTI数组Parray中的所有响应。不确定模型结构形式为usys=Pnom(I +W(s)Δ(s)),其中:
Δ是一个ultidyn对象,表示具有单位峰值增益的不确定动态。
W是一种稳定的最小相位整形滤波器,可以调整每个频率的不确定性。对于MIMO Pnom, W是对角线,对角线元素的顺序由ord给出。
usys = ucover(Parray,Pnom,ord1,ord2,utype)返回utype指定结构的不确定模型。
utype = 'InputMult' -输入乘法形式,其中usys = Pnom*(I +W1DeltaW2)
utype = 'OutputMult' -输出乘法形式,其中usys = (I +W1DeltaW2)*Pnom
utype = 'Additive' -加法形式,其中usys = Pnom +W1DeltaW2
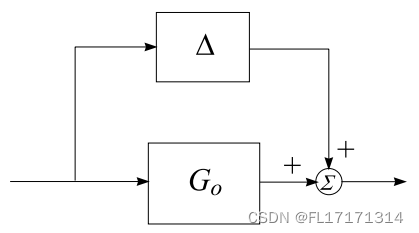



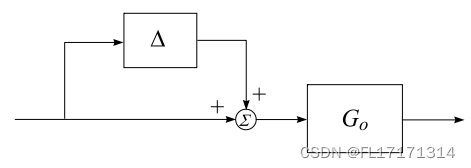

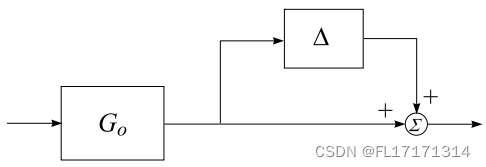







加性不确定性表示说明了实际动力学和名义模型之间的绝对误差,而乘法表示说明了相对误差。
————————————————————————————————
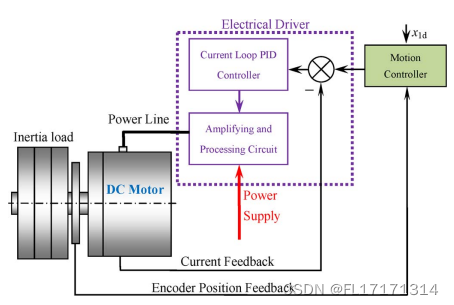
在建模传感器精度方面,可以将传感器的误差建模为系统输入和输出之间的加性噪声,从而将其纳入系统的数学模型中。
在建模力矩纹波方面,可以将其建模为系统中的不确定参数,并使用鲁棒控制方法设计能够抑制这些纹波的控制器。
在建模未建模动态方面,可以使用系统辨识技术来获取系统的实际动态特性,并将其纳入系统的数学模型中。鲁棒控制方法可以设计能够抵消这些未建模动态的控制器。
在建模量化噪声和时延方面,可以使用数学模型来描述量化噪声和时延对系统的影响,并将其纳入系统的数学模型中。鲁棒控制方法可以设计能够在存在这些不确定性的情况下保持系统的稳定性和控制性能的控制器。
加性不确定性建模的基本思想是将不确定性看作是加在系统的输入或输出上的扰动,从而描述其对系统的影响。在加性不确定性建模中,不确定性项的大小与系统的状态无关,因此通常用于描述随机噪声或偏差。
乘性不确定性建模的基本思想是将不确定性看作是系统参数的变化,从而描述其对系统的影响。在乘性不确定性建模中,不确定性项的大小与系统状态有关,因此通常用于描述参数变化、模型误差等。
对于机器人系统,加性不确定性通常用于描述噪声、测量误差、外部干扰等,而乘性不确定性通常用于描述参数变化、模型误差等。例如,对于机器人系统中的传感器精度和量化噪声,可以使用加性不确定性进行建模;而对于未建模动态和力矩纹波等,通常需要使用乘性不确定性进行建模。
需要注意的是,加性和乘性不确定性的选择取决于不确定性的来源和影响。在实际应用中,需要进行误差分析,以确定误差来源和影响程度,并选择合适的不确定性建模方法来描述机器人系统的不确定性。
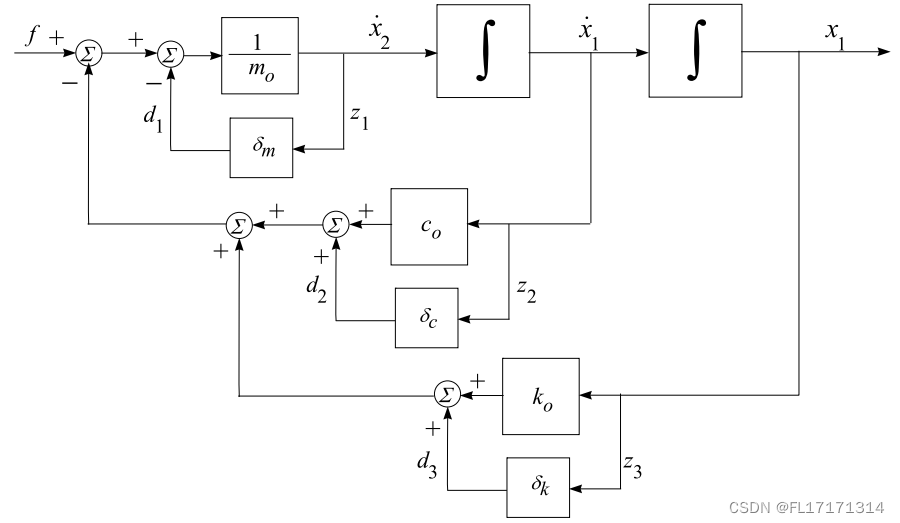
扰动块Δ对应于参数的变化,被称为“参数不确定性”。不确定块Δ不是一个完整的矩阵,而是一个对角线矩阵。它具有一定的结构,因此被称为“结构化不确定性”。

动力学不确定的系统都可以放在标准M-Δ配置中
闭环系统M鲁棒稳定性结果:


结构奇异值的倒数表示一个与频率相关的稳定裕度。
参考文献:
Fit uncertain model to set of LTI responses - MATLAB ucover- MathWorks 中国This MATLAB function returns an uncertain model usys with nominal value Pnom and whose range of behaviors includes all responses in the LTI array Parray.https://ww2.mathworks.cn/help/robust/ref/dynamicsystem.ucover.html
版权归原作者 FL17171314 所有, 如有侵权,请联系我们删除。