
目录
基础概念
1. 缩略语
VCS:Vehicle Coordinate System 自车坐标系
CAN:Controller Area Network 控制器局域网络
EOL:End of Line 车辆下线,一般指工厂标定
2. 为什么需要外参标定
在汽车设计的时候,结构工程师会提供设计的参数,用来安装传感器,所以初始外参在汽车被设计完成的时候就被基本固定。
但是有两个因素会导致外参变化:
- 安装过程有安装误差
- 汽车在行驶过程中由于胎压,载荷,形变等改变,导致外参的变化
3. 基于使用场景的标定分类
名称使用场景方法初始参数EOL标定车辆生产时,在产线中的一个工位,基于诊断仪触发标定,标定传感器外参,初始化域控制器内部参数,及诊断车辆的软硬件基本状况基于标定间的方法车辆设计参数售后标定车辆售出后,由于外部问题返修,更换域控制器,或者调整,更换传感器后,重新标定传感器的参数基于标定间或在线数据车辆设计参数背景式标定车辆在使用过程中,由于载荷变化,胎压变化,车体形变等原因,传感器的外参会有微小的变化,所以需要在软件的后台,进行一组标定进程,用于实时计算传感器外参,并刷新之前在售后或者EOL阶段写入的外参基于在线数据的方法上一次标定落盘的参数
4. 基于方法的分类
- 基于标定间的方法 建立标定间,在标定间布局一定数量的标靶,标靶形式包含但不限于棋盘格,AprilTag,品字格等。精确测量标靶关键点的位置信息输入给标定算法模块,同时输出传感器的初始外参数据。
- 基于在线数据的方法 在车辆运行过程中,基于实时观测到的数据(包含但不限于的语义分割,目标检测,特征点检测,里程计,GNSS等),通过对齐传感器与车辆底盘之间,传感器之间的观测一致性,实现对于外参的精确修正。
5. 基础坐标系
- vcs坐标系
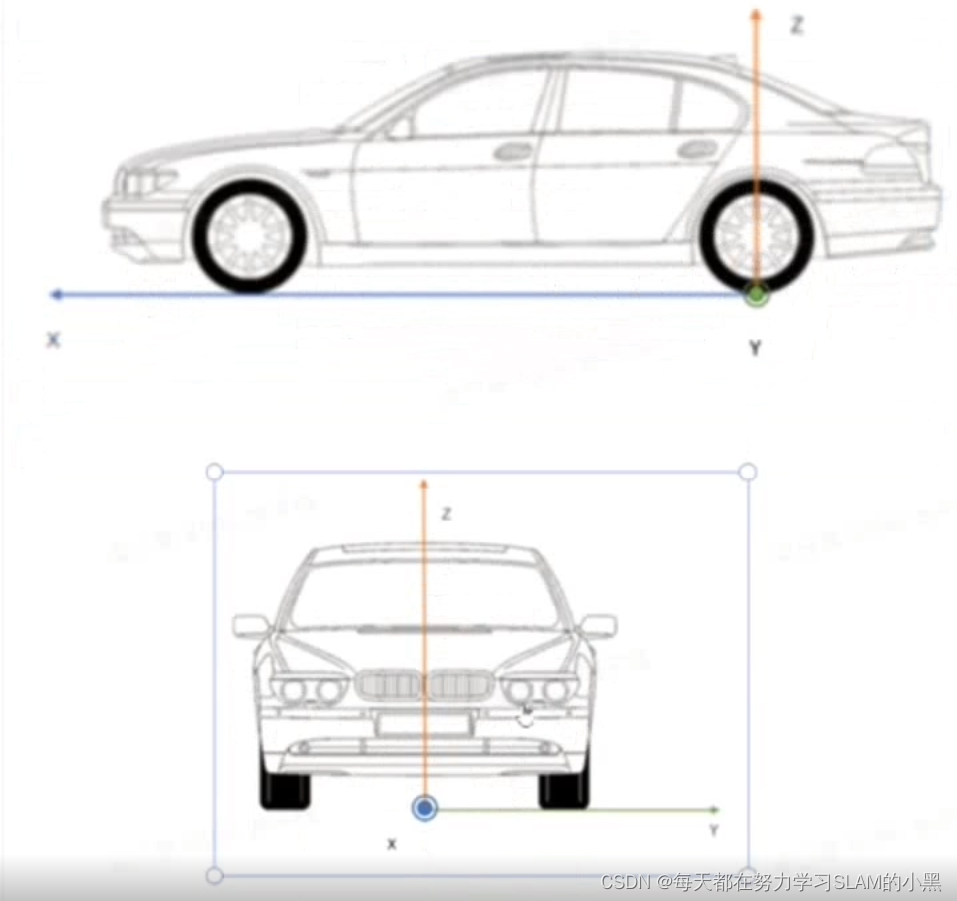 右手系,原点位于后轴中心的地面投影点, X,Y,Z分别为车辆的前、左、上方向
右手系,原点位于后轴中心的地面投影点, X,Y,Z分别为车辆的前、左、上方向 - camera坐标系 原点为相机光心,x朝前,y朝左,z朝上
6. 超差
一般基于传感器的功能,对传感器的角度有一定的阈值要求,比如不可超过设计角度2°以上。
传感器工厂/4S店安装过程中,或者车辆使用过程中,传感器的外参与设计外参的差有一定概率超过阈值。此时,标定就算可以标出这个具体的角度值,也需要在系统内报错,以告知当前角度超过了可以正常开启功能的范围。这个错误称为“超差”。
EOL标定
1.EOL特点
EOL标定的会在每辆车下线时执行,用于在车辆前初始化,车辆的外参等初始参数,检查传感器安装角度误差是否符合要求。
- 功能发布时间早 在车辆下线时,ECU就需要具备完整稳定的EOL标定功能,因此,EOL功能的开发和测试需要完成的时间非常早。需要有严格的开发周期管控。基本在产线试产车开始前,就要完成开发和测试工作,发布稳定版本,然后在产线持续一个月左右的产线试车测试。
- 版本稳定性要求高
- 链路长,涉面广 标定涉及从工厂诊断仪,到MCU,到SOC内的系统软件,状态机,感知软件,应用软件,算法等诸多开发模块,开发测试链路长,协作的功能模块多,且这些链路可能有多家供应商及OEM协作完成。总体联调复杂度高
- 与OEM及工厂耦合度高 EOL标定依赖了工厂的标定间基础设置,功能开发过程中,需要对标定间可用性,标定间的设计,标定间设备验收严格把关。 EOL标定可能需要一个软件版本支持多个标定间,多个车型等情况,与OEM车型,工厂设施等耦合。需要在标定算法上做好兼容设计。
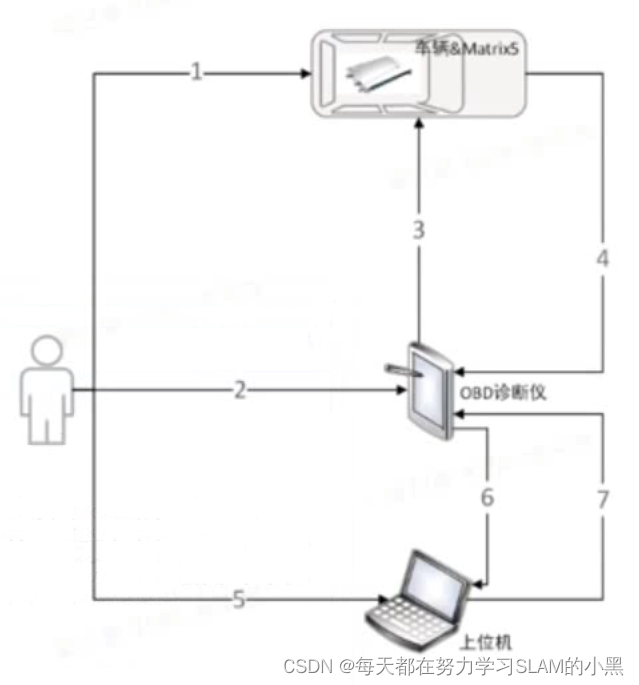
2. EOL标定流程
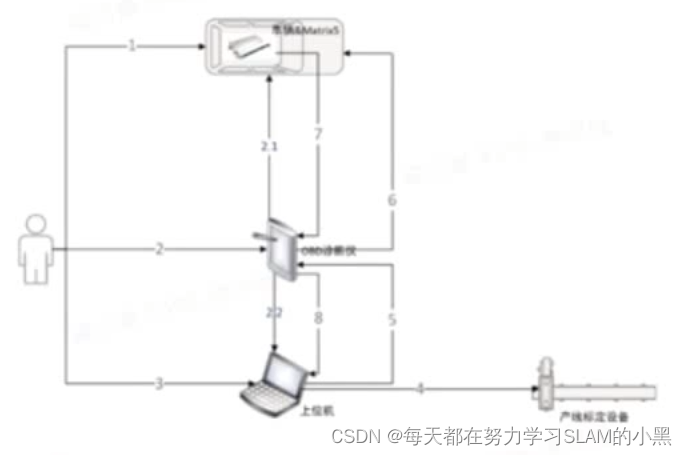
- 驾驶员驾驶完成四轮定位及胎压匹配车辆进入标定工位,准备产线标定
- 产线操作员操作OBD接口连接诊断仪,通过诊断仪下发命令进入标定数据(需考虑车辆在有驾驶员以及空载、满载等不同负载条件下的车辆数据,如底盘高度数据,悬架数据) 2.1 诊断仪完成和车辆域控制器的连接(通过MCU) 2.2 诊断仪完成和上位机的连接(可通过WIFI)
- 产线操作员通过车辆VIN码关联车辆信息
- 上位机控制标定间设备进入产线标定要求位置;
- 上位机给诊断仪下发产线标定任务
- 诊断仪给车辆域控制器下发产线标定任务;
- 车辆域控制器通过DTC/DID返回产线标定状态结果给诊断仪
- 诊断仪上传产线标定状态结果到上位机,产线标定结束
3. EOL标定软件约束
- 算力 EOL阶段,自动驾驶功能未开启,可以占用SOC的大部分计算资源
- 时间 由产线生产标定流程及软件执行效率共同决定,一般会被约束在1分钟以内
- 精度指标 由于标定间标靶位置误差或者整齐误差,工厂标定精度一般等于或者低于背景式标定精度,基本达到下游功能要求的精度指标
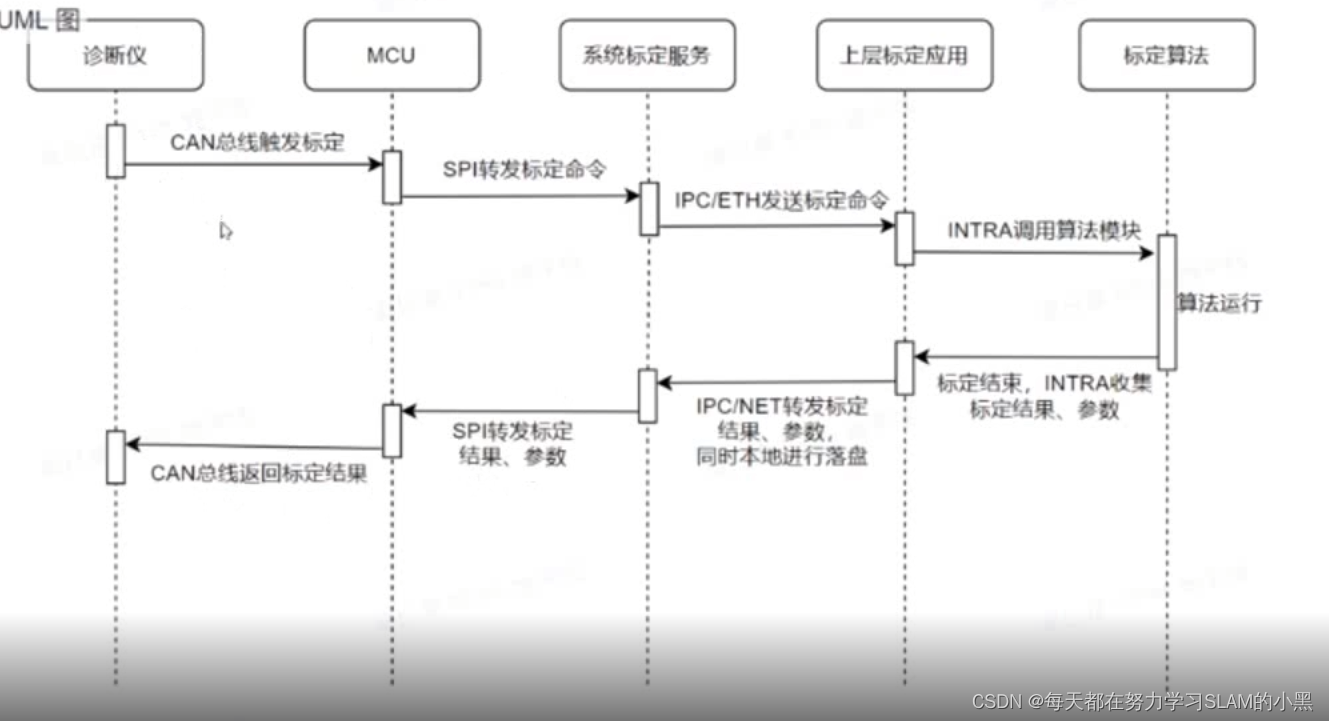
4. EOL标定软件流程
5. 算法设计原则
- 需要支持多车型和多标定间
- 不同的项目需要支持不同的标靶配置
- 简单有效的算法设计 考虑到产线测试资源和调整时间优先,EOL算法需要尽量在保证精度的前提下做的简单,降低出错的风险
6. 算法基本原理
针对相机类sensor,EOL标定算法原理基本类似,首先摆正器定位车辆在标定间中的位置,再通过相机检测到Ariltag、棋盘格等标志物,提取图像中的角点像素信息,已知相机内参以及角点在车体坐标系(后轴中心或者其他位置)中的3D坐标,通过3D-2D姿态求解算法计算相机与车体坐标的相对位姿。
6.1 标定流程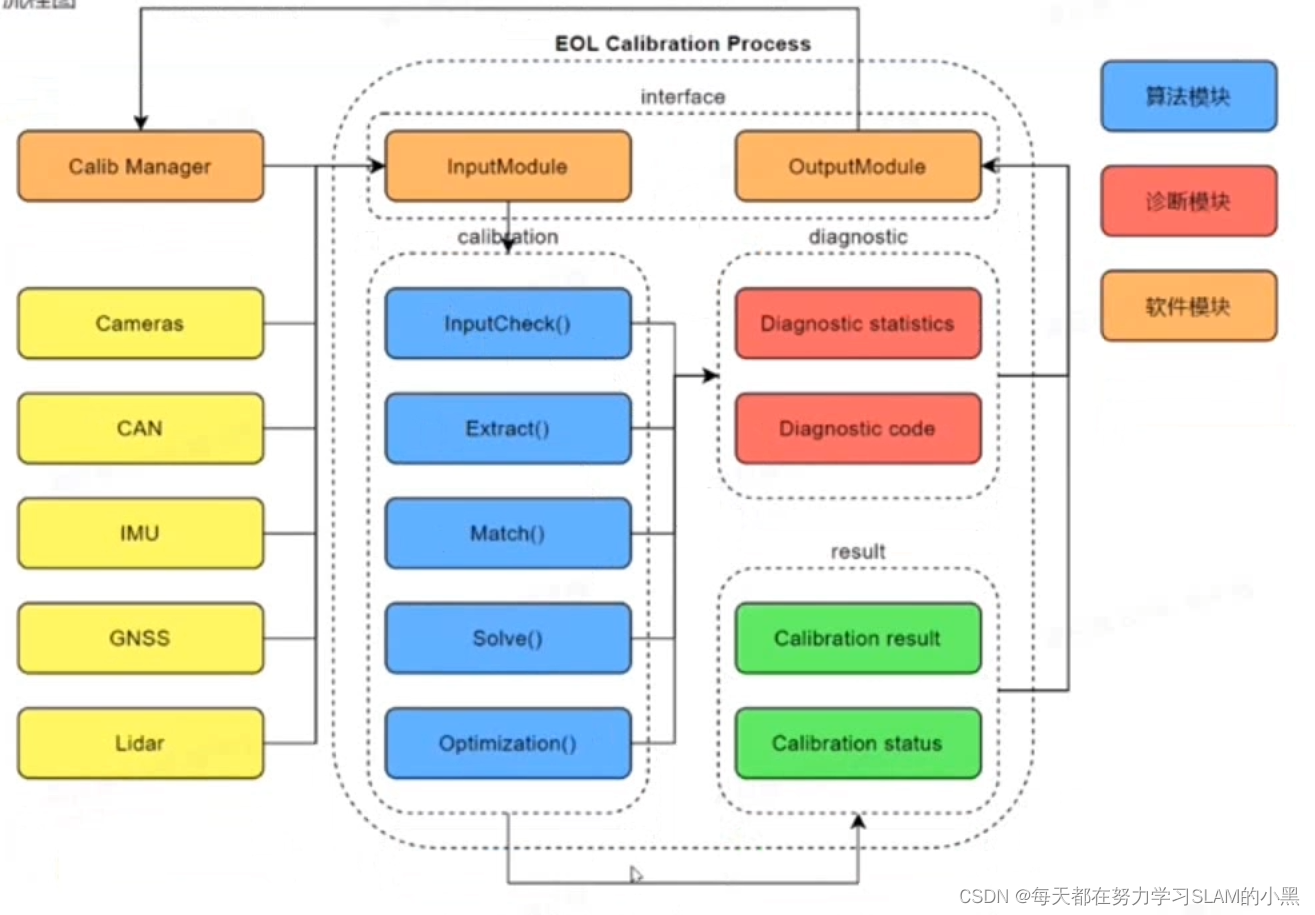
6.2 标定状态与诊断
- 角点提取失败
- 检测失败,检测到的标定板不符合预期
- 内参校验失败(过大或接近0)
- 重投影误差过大(棋盘格位置移动)
- 标定出的rpy超差
- 标定超时
背景式标定
1.背景式标定的特点
背景式标定的会在车辆行驶时执行,用于在车辆标定参数的更新,车辆的初始外参的检查,同时检查传感器安装角度误差是否符合要求,以及对软硬件功能个做初步的诊断,其具有一下特点:
- 功能常驻后台 在车辆上电时,背景式标定功能就随着系统的启动而被开启了。在车辆的运行过程中,背景式标定始终在运行与处理数据,因此对于它的CPU与内存占用提出了严格的要求。同时它会在后台不断检查传感器的参数与安装状态,确保车辆功能安全。
- 稳定性
- 精度要求好
- 连续性 背景式标定需要持续运行,在下电时,需要保存当前背景式标定的中间结果,以便下次上电继续基于这个断点运行。
2. 背景式标定运行流程
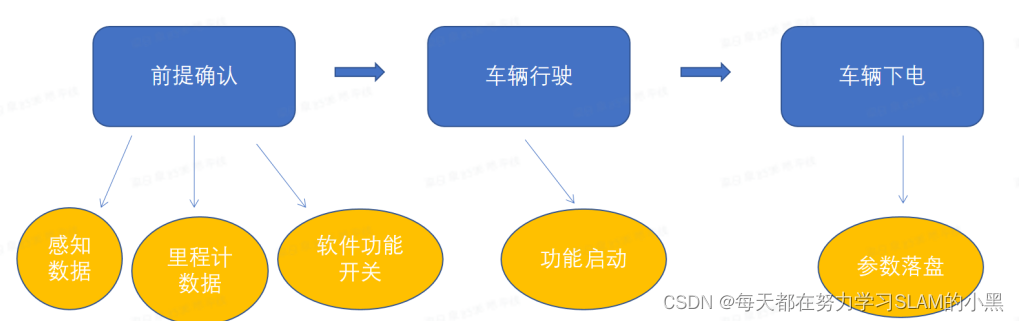
背景式标定全程实现自动化处理,无需进行人为干预;
软件流程:
- 标定软件检查各个依赖数据是否满足。在观测数据都满足条件后进入算法处理
- 当车辆在平坦直道上行驶把,算法会收集当下的观测数据
- 在观测数据满足一定数量限制是,算法会停止收集数据
- 此时软件会启动求解线程。对收集到的数据进行解算,得到一组外参标定值,
- 算法会对此次计算的外参标定值进行验证,若外参标定值超过传感器设计安装角度时,会触发错误警告。
- 当外参计算值符合标定要求时,软件会保存当次计算结果
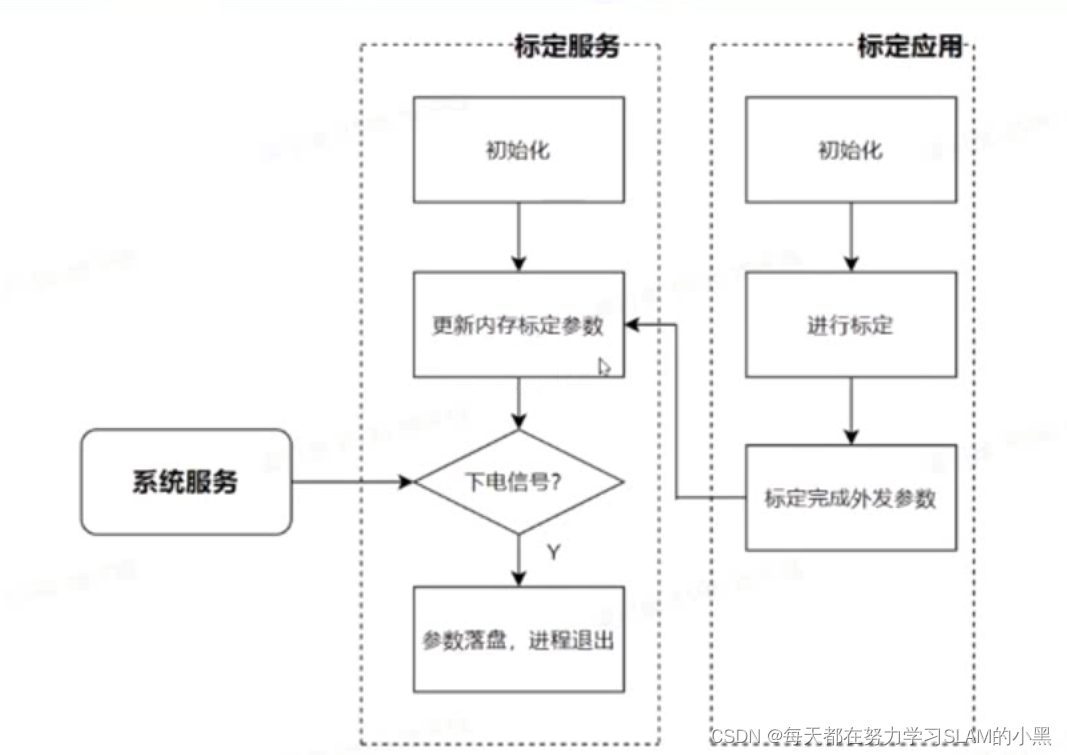
- 软件等待车辆下电信号,在车辆下电时,将最新的外参标定值进行参数落盘
3. 背景式标定软件约束
- 算力 背景式标定一般占用SOC的小部分计算资源
- 时间 由车辆行驶环境决定,一般会被约束在30分钟以内完成一次背景式标定
- 精度指标 一般等于或略高于EOL标定的精度指标,基本达到下游功能要求的精度指标
4.背景式标定软件流程
5. 算法设计准则
- 常驻后台标定 因此需要算法有足够少的cpu占用,有足够稳定的运行性能
- 准确性与精度
6.算法基本原理
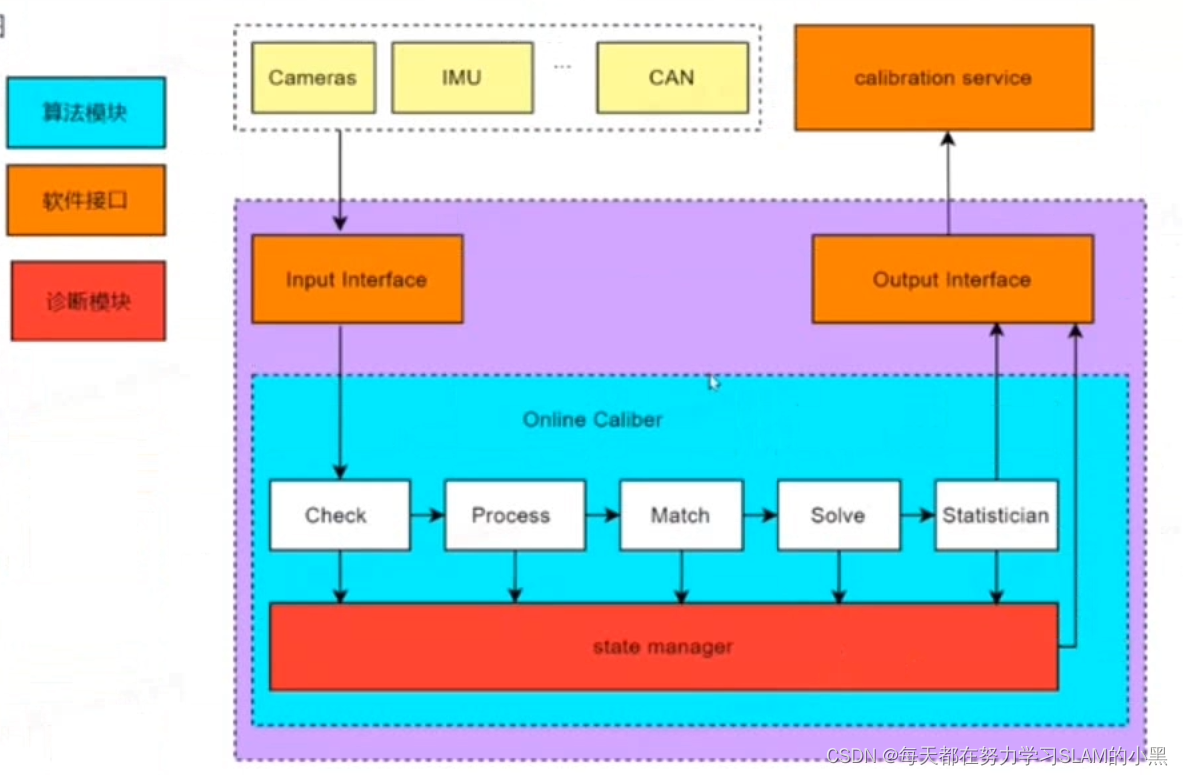
原理:
数据检查:检查输入数据是否异常,
数据处理:根据算法的需要,过滤输入的数据,例如将车道线轮廓点降采样,利用极限约束特征点的离群点
特征匹配:传感器间进行特征匹配,构建共视约束关系
求解:利用传感器间的约束关系,求解相机外参
统计分布:数据统计模块接受不同时间段的求解结果,统计他们的均值与方差,当方差满足一定要求后则认为外参收敛
状态管理:接收各个算法子模块的错误码,将错误码发送到标定服务
7. 标定指标
绝对精度: 0.2°~0.3°
绝对精度是指测量值与真值之差的绝对值,其中真值来源于基于lidar或者人工选择的
重复精度:约0.1°
标定时长:30min
售后标定
1. 售后标定的特点
售后标定标定会在车辆出售后,由于外部问题返修中更换域控制器,以及调整或者更换传感器后执行,用于重新标定传感器的参数,检查传感器安装角度是否符合要求,以及对软硬件功能做初步诊断,其功能特点与EOL标定类似。
售后标定分为基于标定间的方法和基于在线数据的方法,基于在线数据的方法包含以下特点:
- 版本稳定性要求高
- 链路长,涉面广 标定设计从诊断仪,到MCU,到SOC内的系统软件,状态机,感知软件,应用软件,算法等诸多模块,开发测试链路长,协作的功能模块多,且这些链路可能由多家供应商及OEM协作完成。总体联调复杂度高。
- 对标定时间与场景有限制 对标定场景有一定限制,需要在较为空旷和结构化(多车道要求)场景下进行,同时为了保证标定效率也对标定时间做出了限制。 对收敛时间要求高,若标定无法在标准时间内收敛,则会影响使用体验,及增加车辆卖出前的行驶里程。
2. 售后标定运行流程
- 驾驶员驾驶胎压匹配车辆进入售后标定道路环境,准备售后标定
- 售后标定操作操作员通过OBD接口连接诊断仪,诊断仪完成和车辆域控制器的连接(通过MCU)
- 通过诊断仪下发命令进入标定模式,一般情况下,车辆是静止状态才能下发诊断命令
- 操作员按照售后诊断仪屏幕上的提示进行操作,然后驾驶车辆到标定道路上。
- 车辆域控制器将标定结果与标定进度发送到诊断仪
- 可以通过诊断仪实时看到标定进度,当标定进度达到100%,停下车辆到安全区域。
- 诊断仪通过诊断命令读取售后标定结果,显示在屏幕上,如果显示“标定成功”,售后标定结束
3. 售后标定软件约束
- 算力 售后标定阶段,自动驾驶功能未开启,可以占用SOC的大部分计算资源
- 时间 在符合售后标定需求的场景下,一般会被约束在20分钟内
- 进度指标 一般等于EOL标定的精度指标,基本达到了下游功能要求的精度指标。
4. 标定指标
绝对精度:0.3°~0.6°
重复精度:约0.3°
重复精度是指在相似环境下进行多次标定,得到的测量值之间的差异,它可以用来衡量测量值的稳定性和可靠性。
标定时长:10min
标定时长是指标定系统完成一次标定需要的时间
版权归原作者 每天都在努力学习SLAM的小黑 所有, 如有侵权,请联系我们删除。