
文章目录
图像的放大与缩小
关键API:
resize(src, dsize[, dst[, fx[, fy[, interpolation]]]])
其中:
src:要缩放的图片dsize:缩放之后的图片大小,用元组和列表表示均可,如果按照xy轴比例进行放缩,则要写出dsize = Nonedst:可选参数,缩放之后的输出图片(一般用不上)fx,fy:x轴和y轴的缩放比,即宽度和高度的缩放比interpolation:插值算法——> 例如当图片被放大时,我们怎么去填充空白区域,就用到了此算法,其中:-INTER_NEAREST:邻近插值,速度快,效果差-INTER_LINEAR:双线性插值,使用原图中的四个点进行插值**(默认方法)**-INTER_CUBIC:三次插值,使用原图中的16个点进行插值-INTER_AREA:区域插值,效果最好,计算时间最长
放缩到指定大小:
import cv2
import numpy as np
# 读取图片
dog = cv2.imread('./dog.jpeg')
cat = cv2.imread('./cat.jpeg')# 读取图片大小print("cat.shape:",cat.shape)# (480, 640, 3) print("dog.shape:",dog.shape)# (360, 499, 3) # shape函数显示:(行(高度),列(宽度),通道数)#把猫缩放成和狗一样大 ——> 注意opencv中的显示:先是宽度,再是高度,而我们正常显示shape时是先行(高度)后列(宽度)
new_cat = cv2.resize(cat,(499,360))# 要反过来!print("new_cat.shape:",new_cat.shape)# (360, 499, 3)
cv2.imshow('new_img',np.hstack((new_cat,dog)))# 如果能成功拼到一起,则修改成功!
cv2.waitKey()
cv2.destroyAllWindows()
结果:
cat.shape: (480,640,3)
dog.shape: (360,499,3)
new_cat.shape: (360,499,3)

根据xy轴的比例进行放缩:
import cv2
import numpy as np
# 读取图片
cat = cv2.imread('./cat.jpeg')# 读取图片大小print("cat.shape:",cat.shape)# (480, 640, 3) # shape函数显示:(行(高度),列(宽度),通道数)# 还可以按照x,y轴的比例进行缩放 ——> 此时要把参数dsize写成None
new_cat = cv2.resize(cat,dsize =None,fx =0.5,fy =0.5)print("new_cat.shape:",new_cat.shape)# (360, 499, 3)
cv2.imshow('cat',cat)
cv2.imshow('new_cat',new_cat)
cv2.waitKey()
cv2.destroyAllWindows()
结果:
cat.shape: (480,640,3)
new_cat.shape: (240,320,3)
可以看到xy轴都缩小了一半
仿射变换
仿射变换是图像旋转、缩放、平移的总称。具体的做法是通过一个矩阵和原图片进行坐标运算,得到新的坐标,完成变换,所以仿射变换的关键就是这个矩阵
仿射变换不会改变每个像素点上的RGB色彩,只会改变像素对应的位置 ——> 我们只要找出其中对应的数学关系,就可以用一个矩阵一次性地把所有的点变过去
通过仿射变换,图像可以通过一系列的几何变换来实现平移、旋转等多种操作。该变换能够保持图像的平直性和平行性。平直性是指图像经过仿射变换后,直线仍然是直线;平行性是指图像在完成仿射变换后,平行线仍然是平行线。
关键API:
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
其中:
M:变换矩阵dsize:输出图片大小——> 最好和原图大小一致flag:与resize()中的插值算法一致 (用默认值即可)mode:边界外推法标志,即当图像超出边界时该怎么办 (此处用默认值即可)value:填充边界值 (用默认值即可)
仿射变换之图像的平移
平移矩阵:
矩阵中的**每个像素由
(x,y)
组成**,
(x,y)
表示这个像素的坐标,假设**沿x轴平移
tx
,沿y轴平移
ty
**,那么最后得到的坐标为
(x^ , y^) = ( x + tx , y + ty )
,用矩阵来表示就是: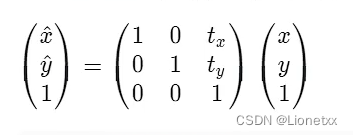
补充(因为我忘了😭):矩阵乘法 = 第一个矩阵的行 × 第二个矩阵的列 ——(1 × x + 0 × y + tx × 1 ) + (0 × x + 1 × y + ty × 1 ) + (0 × x + 0 × y + 1 × 1 )
即
tx = 沿x轴方向向右平移的距离(向左为负) ;ty = 沿y轴方向向下平移的距离(向上为负) ——原点在图片左上角
例:
将图片向右平移200个像素点,上下不平移
# 将图片向右平移200个像素点import cv2
import numpy as np
cat = cv2.imread('./cat.jpeg')# 打印图像cat的高度、宽度,便于设置参数dsize
h,w,ch = cat.shape # 注意!shape()输出是先高度(行),后宽度(列)# 变换矩阵 ——> 要求矩阵类型最小是float32位
M = np.float32([[1,0,200],[0,1,0]])# 平移操作
new_cat = cv2.warpAffine(cat,M,dsize =(w,h))# dsize为输出图片的大小,注意!opencv是先宽度(列),后高度(行),要反过来
cv2.imshow('new_cat',new_cat)
cv2.imshow('cat',cat)
cv2.waitKey()
cv2.destroyAllWindows()
结果: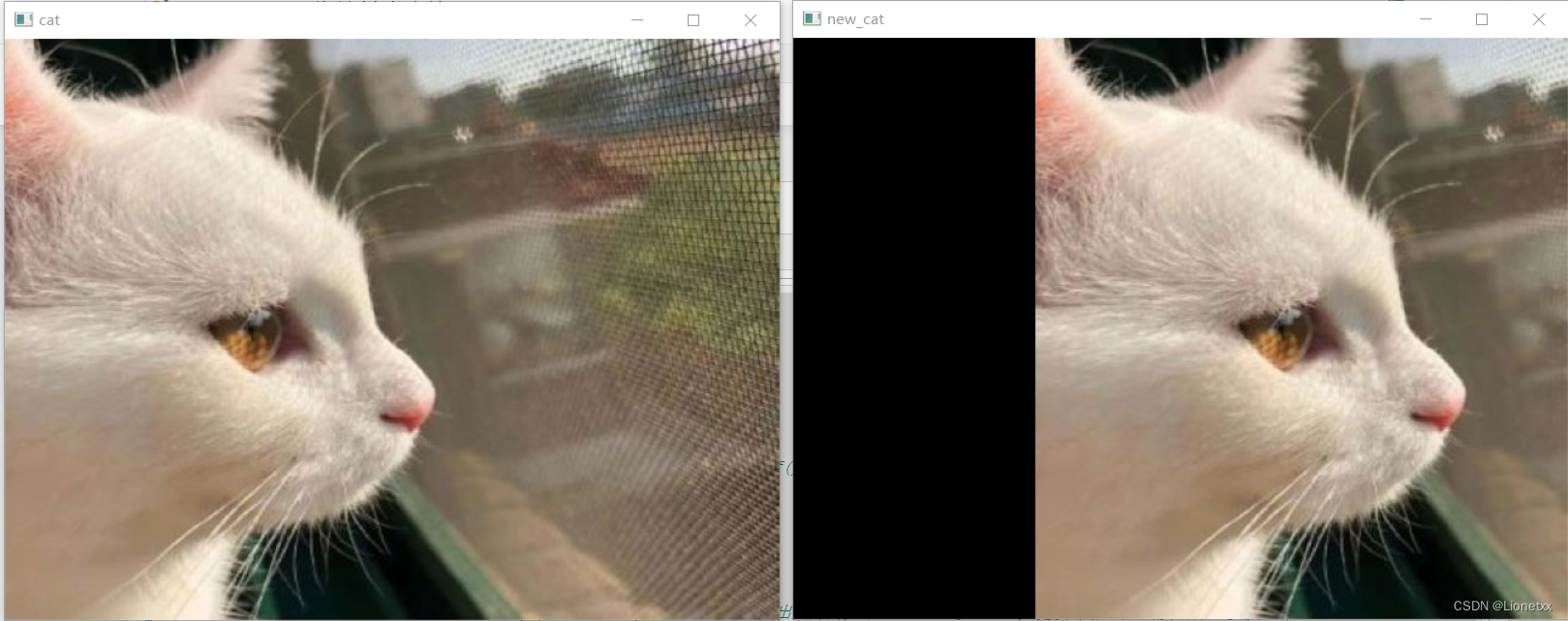
仿射变换之获取变换矩阵
M
方法一:利用旋转角度获取变换矩阵
仿射变换的难点就是计算变换矩阵,OpenCV提供了计算变换矩阵的API
关键API:
cv2.getRotationMatrix2D(center, angle, scale)
# 在进行图像的旋转操作时,手动计算变换矩阵不太方便,而opencv提供了获取旋转变换矩阵的APIimport cv2
import numpy as np
dog = cv2.imread('./cat.jpeg')# 打印图像cat的高度、宽度,便于设置参数dsize
h,w,ch = dog.shape # 注意!shape()输出是先高度(行),后宽度(列)# 获取变换矩阵 变换矩阵一定是2D的(二维)
m = cv2.getRotationMatrix2D((100,100),15,1)#以 (100,100)为原点(左上角为(0,0));逆时针旋转15°;scale = 1表示不缩放
new_dog = cv2.warpAffine(dog,m,(w,h))
cv2.imshow('new_dog',new_dog)
cv2.imshow('dog',dog)
cv2.waitKey()
cv2.destroyAllWindows()
结果: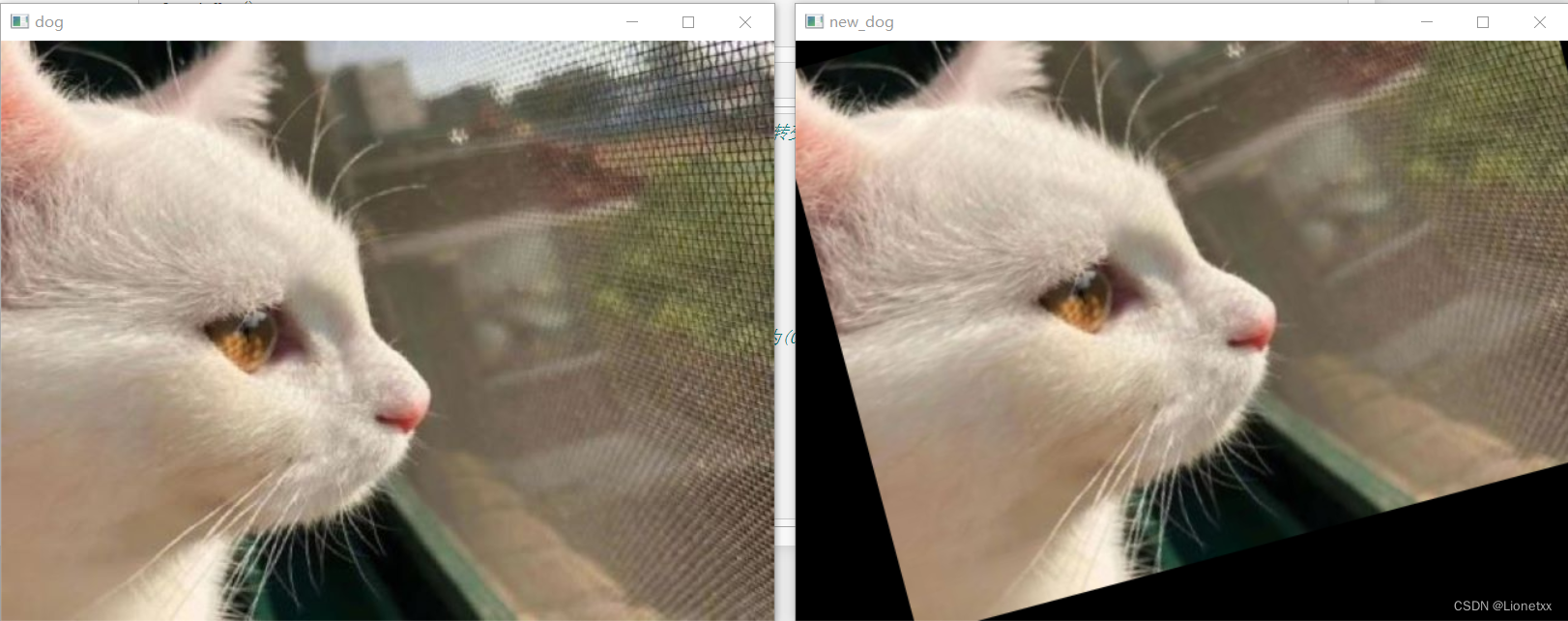
方法二:利用变换前后对应点的关系获取变换矩阵
关键API:
getAffineTransform(src, dst)
其中:
src:原目标的三个点src = np.float32([ [x1 , y1] , [x2 , y2] , [x3 , y3] ])dst:对应变换后的三个点dst = np.float32([ [x^1 , y^1] , [x^2 , y^2] , [x^3 , y^3] ])
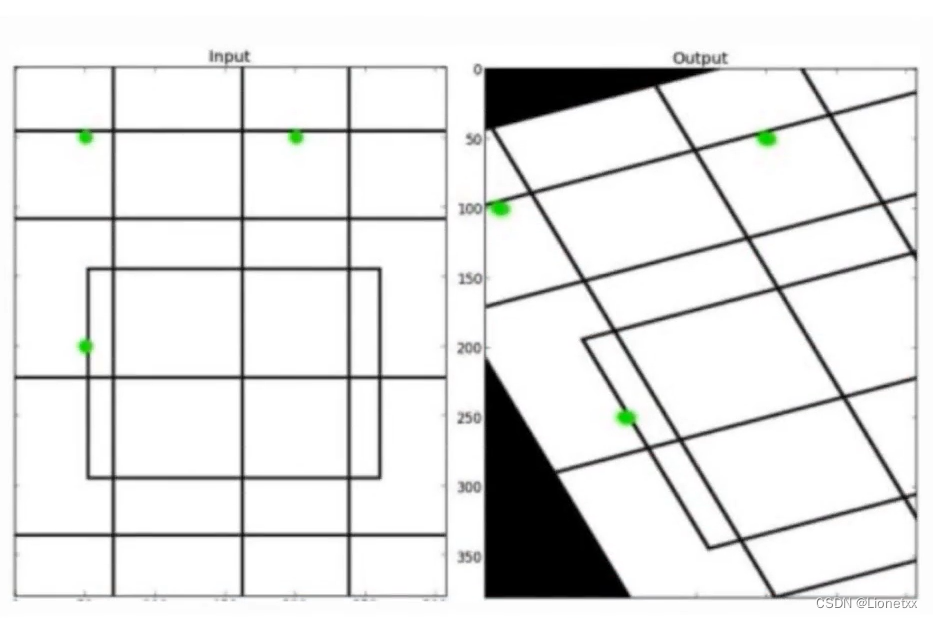
通过三点可以确定变换后的位置,相当于解方程,3个点对应3个方程,能解出偏移的参数和旋转的角度
也就是说我们可以不通过角度,而是通过将原目标的三个点
src
和对应变换后的三个点
dst
一一对应,建立三元一次方程(旋转偏移的参数和旋转角度的方程)
左边为旋转前的图,右边为旋转后的图,绿色点分别为
src
和
dst
例子:
# 通过三个点来确定变换矩阵import cv2
import numpy as np
cat = cv2.imread('./cat.jpeg')# 打印图像cat的高度、宽度,便于设置参数dsize
h,w,ch = cat.shape # 注意!shape()输出是先高度(行),后宽度(列)# 获取变换矩阵:需要原始图片的三个点坐标 "src",和变换之后对应的三个点的坐标 "dst"
src = np.float32([[200,100],[300,100],[200,300]])
dst = np.float32([[100,150],[360,200],[280,120]])
m = cv2.getAffineTransform(src,dst)
new_cat = cv2.warpAffine(cat,m,(w,h))
cv2.imshow('new_cat',new_cat)
cv2.imshow('cat',cat)
cv2.waitKey()
cv2.destroyAllWindows()
结果: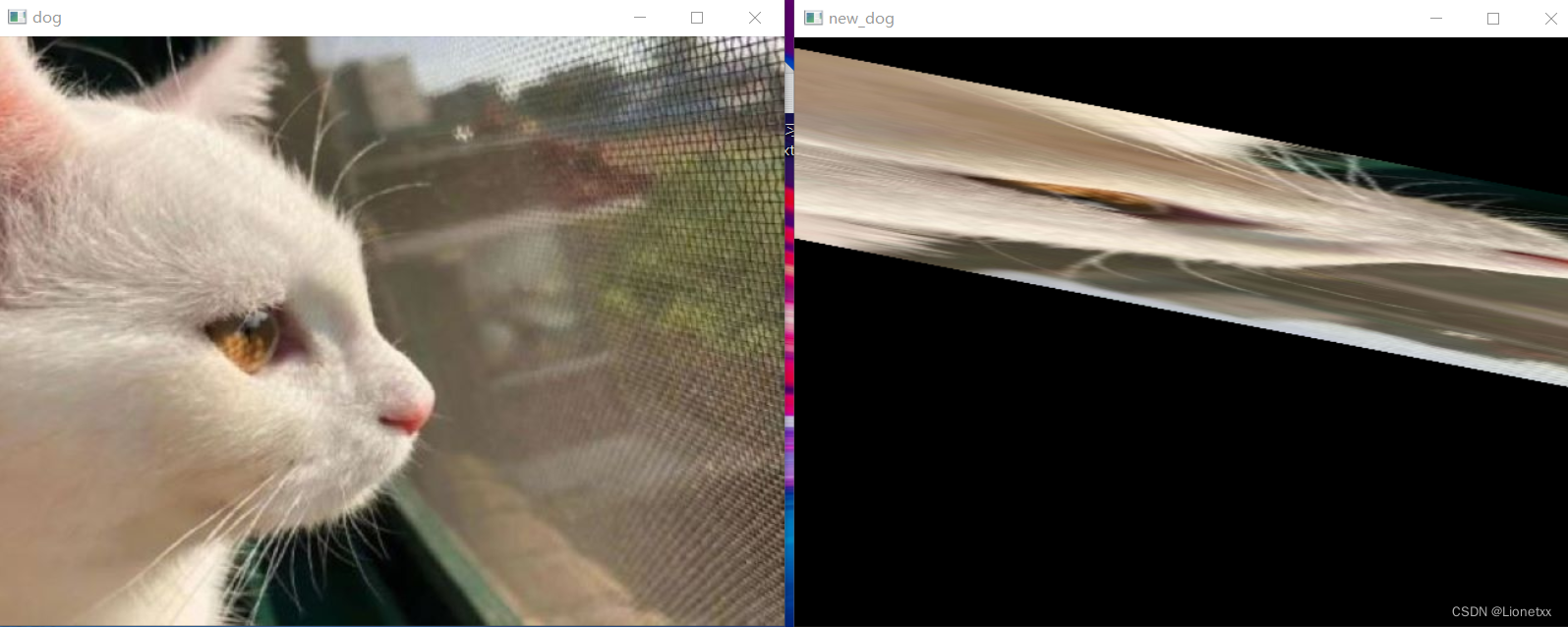
(变换得雀食抽象,我也没去仔细算,会用就行😀)
透视变换
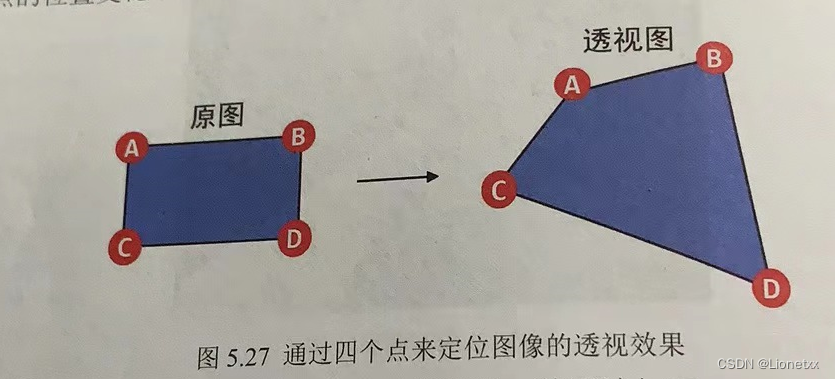
透视变换就是将一种坐标系变成另一种坐标系,简单地来说就是可以把一张 “斜” 的图变 “正”——> 就像我们在二维平面(纸)上画出三维物体(正方形的3D结构)那样 类似于斜二侧画法
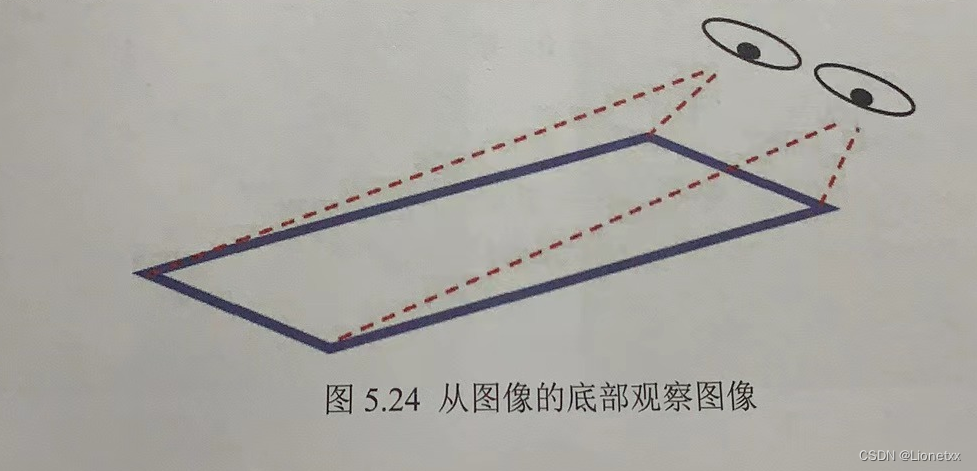
如图5.24所示:从图像的底部去观察图,图像底部距离眼睛较近,所以宽度不变,但图像顶部距离眼睛较远,宽度就会等比缩小,于是观察者就会得到如图5.26的透视效果
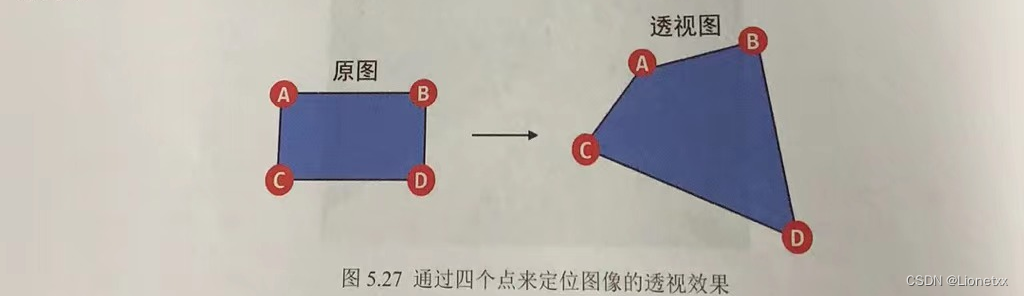
OpenCV
中需要通过定位图像的四个点来进行计算透视效果,四个点的位置如图,
OpenCV
会根据四个点的位置变化来计算出其他像素的位置变化。透视效果不能保证图像的“平直性”和“平行性”
关键API: 获取变换矩阵
cv2.getPerspectiveTransform(src, dst)
,需要四个点,即图片的四个角
其中:
src:变换前图片的四个点**(随意选取)**,但一般我们会选择原图片的四个顶点dst:变换后图片的四个点,和src一样,我们一般选择新图片的四个顶点
关键API: 透视变换
cv2.warpPerspective(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
其中:
src:原图M:变换矩阵,对于透视矩阵来说,M是一个3*3的矩阵dsize:输出图片大小——> 最好和原图大小一致flag:与resize()中的插值算法一致 (用默认值即可)mode:边界外推法标志,即当图像超出边界时该怎么办 (此处用默认值即可)value:填充边界值 (用默认值即可)
# 仿射变换——> 对坐标系的变换,通过原先图片的四个点和变换后图片的四个点构造方程组# 在此例,我们相当于用仿射变换把书中这一页抠出来并且摆正import cv2
import numpy as np
# 我们图片大小为宽1276×高1702
book = cv2.imread('./book.jpg')# 打印图像cat的高度、宽度,便于设置图像中的四个点和设置参数dsize
h,w,ch = book.shape # 注意!shape()输出是先高度(行),后宽度(列)# 获取变换矩阵 ——> 顺序:左上,左下,右上,右下# src = np.float32([[200,200],[1700,100],[200,1000],[1700,1200]])# dst = np.float32([[0,0],[1700,0],[0,1100],[1700,1100]]) # 格式为[h,w],在图像中横轴是w,纵轴是h# 获取变换矩阵 ——> 顺序:左上,,右上,左下,右下
src = np.float32([[200,200],[50,1000],[800,0],[700,1100]])
dst = np.float32([[0,0],[0,1100],[900,0],[900,1100]])
m = cv2.getPerspectiveTransform(src,dst)# 透视变换
new_book = cv2.warpPerspective(book,m,(900,1100))# 由于我们的图太大了,需要再设置窗口大小
cv2.namedWindow('new_book',cv2.WINDOW_NORMAL)
cv2.resizeWindow('new_book',640,480)
cv2.imshow('new_book',new_book)
cv2.namedWindow('book',cv2.WINDOW_NORMAL)
cv2.resizeWindow('book',640,480)
cv2.imshow('book',book)
cv2.waitKey()
cv2.destroyAllWindows()
效果不太好🥀先记录下来吧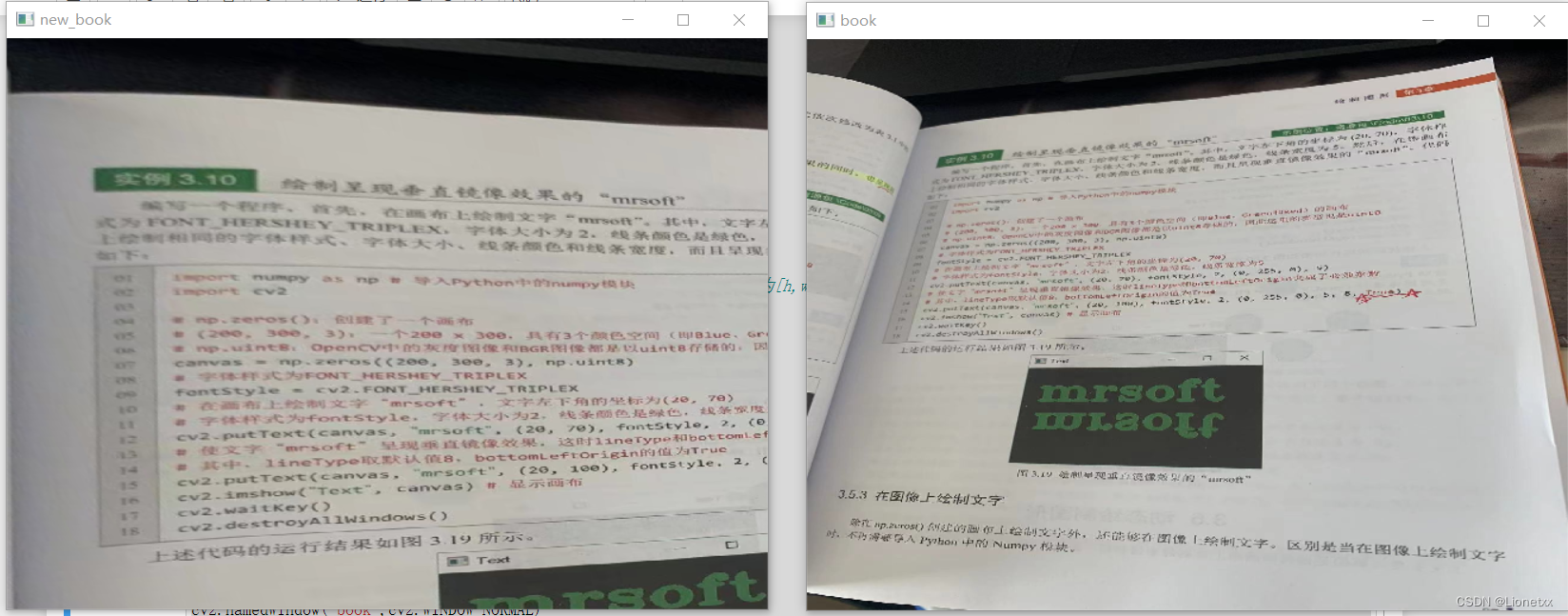
版权归原作者 Lionetxx 所有, 如有侵权,请联系我们删除。