
文章目录
1. 激光雷达基本概念
1.1 激光雷达特点
激光探测及测距系统(Light Detection and Ranging,LiDAR)
- 激光雷达是一种通过发射激光束探测目标的位置、速度等特征量 的雷达系统
- 激光波段位于0.5μm-10μm,以光电探测器为接收器件,以光学望远镜为天线。

特点
• 角分辨率、距离分辨率高
• 抗干扰能力强
• 三维坐标、反射率
• 车体积小、质量轻
1.2 激光雷达测距原理
1.2.1 系统组成

1.2.2 激光雷达测距原理
TOF飞行时间法
- 脉冲测距:通过测量激光脉冲在雷达和目标之间来回飞行时间获取目标距离的信息。
 d = c ⋅ Δ t 2 d = \frac{{c \cdot \Delta t}}{2} d=2c⋅Δt
d = c ⋅ Δ t 2 d = \frac{{c \cdot \Delta t}}{2} d=2c⋅Δt - 相位测距:通过测量被强度调制的连续波激光信号在雷达与目标之间来回飞行产生的相位差获得距离信息。
 d = c ⋅ Δ φ 4 π f d = \frac{{c \cdot \Delta \varphi }}{{4\pi f}} d=4πfc⋅Δφ
d = c ⋅ Δ φ 4 π f d = \frac{{c \cdot \Delta \varphi }}{{4\pi f}} d=4πfc⋅Δφ
1.3 常见的激光雷达
1.3.1 机械旋转式激光雷达
机械式激光雷达是指发射系统和接收系统存在宏观转动,通过不断旋转发射头,将速度更快、发射更准的激光从线变成面,并在竖直方向上排布多束激光,形成多个面,达到动态扫描并动态接收信息的目的。
1.3.2 Velodyne HDL-64E

1.3.3 固态激光雷达
- 严格意义上是指自身不存在任何移动部件的激光雷达,如Flash型激光雷达、相控阵激光雷达。
- 近年来,一些非完全旋转的激光雷达也被统称为“固态激光雷达”,它们具备了固态激光雷达的一般性能特点,如分辨率高、有限水平FOV(前向而不是360°)等,但这些技术方案会有一些微小的移动部件,如MEMS型激光雷达。
1.3.4 Flash型固态激光雷达
- 激光直接向各个方向漫射,一次记录整个场景。
- 分辨率越高,激光之间干扰越强,精度降低。
1.3.5 相控阵固态激光雷达
- 通过控制光源阵列中各光源发光时间差,合成具有特定方向的 主光束,实现对不同方向的扫描。
- 精度高、体积小、生产成本低,但研发成本高。
1.3.6 MEMS型固态激光雷达
- MEMS(Micro-Electro-Mechanical System)激光雷达是指在机械旋转式激光雷达的基础上,采用MEMS微镜替代机械 式扫描单元进行扫描模式动态调整的激光雷达。
- MEMS微镜指采用光学MEMS技术制造的,把微光反射镜与MEMS驱动器集成在一起的光学MEMS器件。

1.3.7 总览
激光雷达是当前高级别自动驾驶最主要的传感器之一,感知能力强。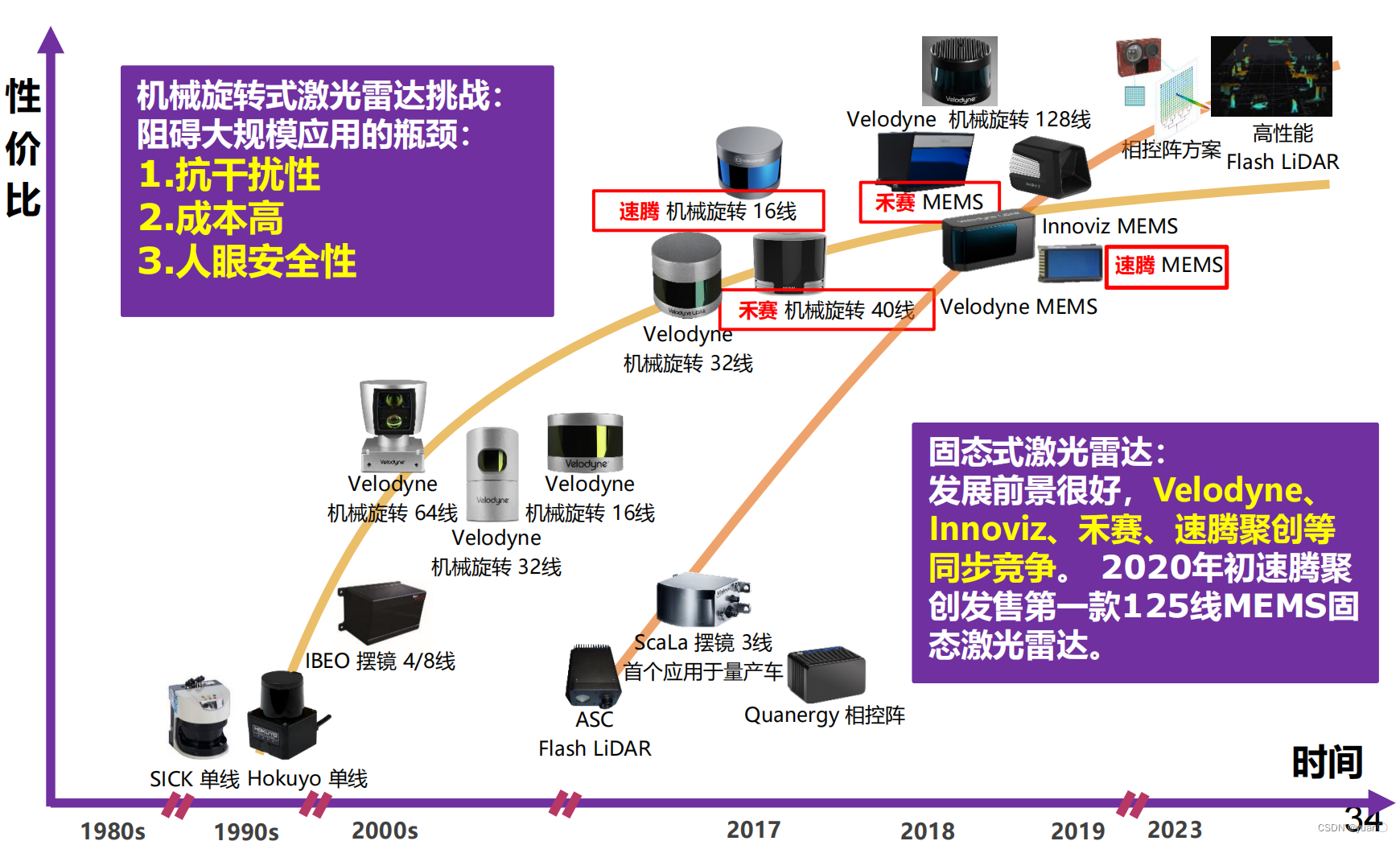
1.4 激光雷达性能指标
从传感器的角度,激光雷达的主要指标包括线束、出点数、精度、测量距离、垂直视场角、垂直角分辨率、水平视场角、水平角分辨率、出点数、通信接口等。
2. 激光雷达点云(Point Cloud)
2.1 激光雷达点云定义
点云是激光雷达获取的三维场景信息的数据存储形式,不同于图像数据,点云由空间中一系列离散的点组成,并记录了这些点相对于激光雷达自身坐标系的三维坐标与反射率。
- 一帧点云数据(包含N个点)可表示为 { x i , y i , z i , r i } i = 1 N { {x_i},{y_i},{z_i},{r_i}} _{i = 1}^N {xi,yi,zi,ri}i=1N
- 其中 ( 𝑥 𝑖 , 𝑦 𝑖 , 𝑧 𝑖 ) (𝑥_𝑖, 𝑦_𝑖, 𝑧_𝑖) (xi,yi,zi)第个点在激光雷达坐标系下的坐标, 𝑟 𝑖 𝑟_𝑖 ri为 该点的反射率。
2.2 激光雷达点云表示方法
- 点视图 (Point View, PV) 原始的点云集合
- 俯视图 (Bird’sEyeView,BEV) 将点云量化为2D/3D网格
- 前视图 (Range View, RV) 将点云投影到图像平面
- 多种视图融合 俯视图+点视图 俯视图+前视图
L. Fan等人
[
1
]
^{[1]}
[1]对这方面的介绍比较详细。PS:文末参考链接无法查看论文的话,可以选择这个链接

3. 为什么要选择激光雷达?
3.1 传感器之间的互补性
❖摄像头
★ 优点:丰富的纹理和颜色信息,适用于目标的分类
★ 缺点:3D信息的感知能力较弱,受光照条件影响较大
❖激光雷达
★ 优点:精确感知目标的3D信息,不受光照影响
★ 缺点:成本较高,量产难度大,受天气影响较大
3.2 不同级别自动驾驶系统的需求
❖ L2级:自适应巡航 + 车道保持
★ 可以采用纯视觉系统来进行目标检测和距离估记
❖ L3级:拥堵辅助,领航辅助
★ 至少配备前向的激光雷达
❖ L4级:RoboTaxi
★ 多个激光雷达提供360度视场,以及系统冗余
激光雷达在自动驾驶中可以进行物体检测、3D场景语义分割以及定位与建图。
4. 激光雷达的标定
4.1 激光雷达参数
内参
内部激光发射器坐标系与雷达自身坐标系的转换关系,厂家提供。
外参
激光雷达坐标系与车体坐标系的转换关系,需要标定。
4.2 单线激光雷达
 车体坐标系以车辆后轴中心作为原点,
车体坐标系以车辆后轴中心作为原点,
X
v
X_v
Xv指向车辆的前方,
Y
v
Y_v
Yv指向车辆的左侧,
Z
v
Z_v
Zv指向车辆的上方。由于激光雷达的坐标系与车体坐标系存在一定的夹角,
X
l
X_l
Xl与
X
v
X_v
Xv存在
α
\alpha
α的角度偏差,
Y
l
Y_l
Yl与
Y
v
Y_v
Yv存在
γ
\gamma
γ的角度偏差,所以需要标定。
4.2.1
γ
\gamma
γ侧偏角的标定

γ
\gamma
γ侧偏角的标定需要用到矩形板ABCD。如图所示,矩形板ABCD平行于Z轴,且位于激光雷达的前方。激光束扫描的点构成了EF直线段,EG直线段为AB的平行线。
想要求得
γ
\gamma
γ侧偏角,可以利用
γ
=
arccos
(
l
E
G
l
E
F
)
=
arccos
(
l
A
B
l
E
F
)
\gamma = \arccos (\frac{{{l_{EG}}}}{{{l_{EF}}}}) = \arccos (\frac{{{l_{AB}}}}{{{l_{EF}}}})
γ=arccos(lEFlEG)=arccos(lEFlAB)得到。
L
A
B
L_{AB}
LAB可以由矩形板的边长大小得知,
L
O
F
L_{OF}
LOF已知,
L
O
E
L_{OE}
LOE也可以通过激光雷达的数据得到,因此可以求得
L
E
F
L_{EF}
LEF,最后求得
γ
\gamma
γ侧偏角。
4.2.2
α
\alpha
α俯仰角的标定

;首先不考虑侧偏角
γ
\gamma
γ。激光雷达的Y轴垂直纸面向外,X轴呈如图所示方向,Z轴竖直向上。首先在1处放置一块标定板,激光雷达在标定板上扫描的位置为A,接着移动标定板置B处,过B作平行于地面的平行线,得到BC,即可求得
α
\alpha
α俯仰角。
 在实际过程中,需要考虑侧偏角。如图所示,在1处放置一块等腰三角形的标定板,同之前的步骤,将标定板移至2处,由图可知,
在实际过程中,需要考虑侧偏角。如图所示,在1处放置一块等腰三角形的标定板,同之前的步骤,将标定板移至2处,由图可知,
∠
F
1
E
1
D
1
\angle {F_1}{E_1}{D_1}
∠F1E1D1与
∠
F
2
E
2
D
2
\angle {F_2}{E_2}{D_2}
∠F2E2D2为侧倾角。
过
D
2
D_2
D2作地面的平行线交于G点,可知
∠
G
D
2
D
1
\angle GD_2D_1
∠GD2D1即为要求的
α
\alpha
α俯仰角。易知
α
=
arctan
(
D
1
G
D
2
G
)
=
arctan
(
D
1
G
B
1
B
2
)
\alpha = \arctan \left( {\frac{{{D_1}G}}{{{D_2}G}}} \right) = \arctan \left( {\frac{{{D_1}G}}{{{B_1}{B_2}}}} \right)
α=arctan(D2GD1G)=arctan(B1B2D1G)
D
1
G
=
B
1
D
1
−
B
2
D
2
D_1G=B_1D_1-B_2D_2
D1G=B1D1−B2D2
B
1
D
1
=
B
1
C
1
−
C
1
D
1
B_1D_1=B_1C_1-C_1D_1
B1D1=B1C1−C1D1
C
1
D
1
=
E
1
D
1
C_1D_1=E_1D_1
C1D1=E1D1
E
1
D
1
=
E
1
F
1
c
o
s
(
γ
)
E_1D_1=E_1F_1cos(\gamma)
E1D1=E1F1cos(γ) 从而可以求得
α
\alpha
α俯仰角
4.3 多线激光雷达
 如图所示:
如图所示:
车体坐标系:
O
v
,
X
v
,
Y
v
,
Z
v
O_v,X_v,Y_v,Z_v
Ov,Xv,Yv,Zv
激光雷达坐标系:
O
l
,
X
l
,
Y
l
,
Z
l
O_l,X_l,Y_l,Z_l
Ol,Xl,Yl,Zl
假设车体坐标系一点
P
=
(
X
,
Y
,
Z
)
P=(X,Y,Z)
P=(X,Y,Z),其在激光雷达坐标系中为
P
′
=
(
X
′
,
Y
′
,
Z
′
)
P'=(X',Y',Z')
P′=(X′,Y′,Z′),于是有以下关系:
[
X
Y
Z
]
=
R
[
X
′
Y
′
Z
′
]
+
T
\left[ {\begin{array}{ccccccccccccccc}X\\Y\\Z\end{array}} \right] = R\left[ {\begin{array}{ccccccccccccccc}{X'}\\{Y'}\\{Z'}\end{array}} \right] + T
XYZ=RX′Y′Z′+T
R
R
R为激光雷达坐标系到车体坐标系的旋转矩阵,
T
T
T为激光雷达坐标系到车体坐标系的平移向量
4.3.1 纸箱法

- 在水平地面上摆放正方体纸箱,采集激光雷达数据
- 获得纸箱顶点的激光雷达坐标系坐标
- 通过测量得到纸箱顶点的车体坐标系坐标
- 用纸箱顶点的坐标代入坐标变换方程,求出旋转矩阵和平移向量
4.4 相机与激光雷达联合标定

将雷达点云向图像融合 将图像像素向雷达点云融合
将图像像素向雷达点云融合
通过融合的方式,可以弥补单个传感器的不足,可以更好地环境感知。因此,就需要对相机和激光雷达进行联合标定。
标定内容:标定从激光雷达坐标系到相机坐标系的空间变换关系。

 对于单线激光雷达,选择标定箱上的两个端点
对于单线激光雷达,选择标定箱上的两个端点 对于多线激光雷达,选择标定箱上下边沿的左右端点。
对于多线激光雷达,选择标定箱上下边沿的左右端点。 获取像素雷达点对之后,结合相机内参,求解关于旋转矩阵和平移向量的线性方程,即可标定。
获取像素雷达点对之后,结合相机内参,求解关于旋转矩阵和平移向量的线性方程,即可标定。
参考文献
[1] L. Fan, X. Xiong, F. Wang, N. Wang and Z. Zha ng, “RangeDet: In Defense of Range View for LiDAR-based 3D Object Detection,” 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 2021, pp. 2898-2907, doi: 10.1109/ICCV48922.2021.00291.
声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。本系列文章主要参考了清华大学、北京理工大学、哈尔滨工业大学、深蓝学院、百度Apollo等相关课程。
版权归原作者 yuan〇 所有, 如有侵权,请联系我们删除。