
文章目录
一、坐标关系
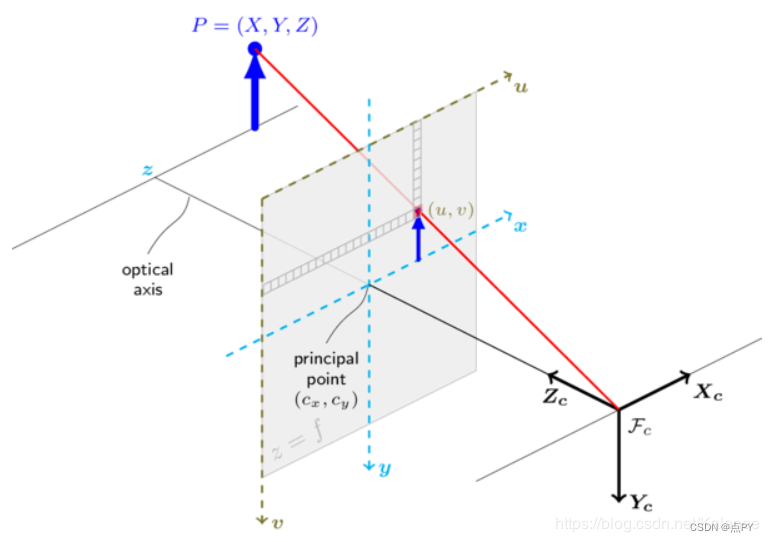
相机中有四个坐标系,分别为world,camera,image,pixel
- world为世界坐标系,可以任意指定xw轴和yw轴,为上图P点所在坐标系。
- camera为相机坐标系,原点位于小孔,z轴与光轴重合,xw轴和yw轴平行投影面,为上图坐标系XcYcZc。
- image为图像坐标系,原点位于光轴和投影面的交点,xw轴和yw轴平行投影面,为上图坐标系XYZ。
- pixel为像素坐标系,从小孔向投影面方向看,投影面的左上角为原点,uv轴和投影面两边重合,该坐标系与图像坐标系处在同一平面,但原点不同。
二、坐标变换
下式为像素坐标pixel与世界坐标world的变换公式,右侧第一个矩阵为相机内参数矩阵&#x
本文转载自: https://blog.csdn.net/weixin_42990464/article/details/128108533
版权归原作者 点PY 所有, 如有侵权,请联系我们删除。
版权归原作者 点PY 所有, 如有侵权,请联系我们删除。