
目录
0 写在前面
机器学习强基计划聚焦深度和广度,加深对机器学习模型的理解与应用。“深”在详细推导算法模型背后的数学原理;“广”在分析多个机器学习模型:决策树、支持向量机、贝叶斯与马尔科夫决策、强化学习等。强基计划实现从理论到实践的全面覆盖,由本人亲自从底层编写、测试与文章配套的各个经典算法,不依赖于现有库,可以大大加深对算法的理解。
🚀详情:机器学习强基计划(附几十种经典模型源码)
在机器学习强基计划6-2:详细推导马尔科夫随机场(MRF)及其应用(附例题)中我们系统地介绍了引入马尔科夫随机场的动机及其基本概念,但由于公式繁多,很难理解这个模型如何应与实际相结合,本文结合一个计算机视觉领域的经典问题——图像分割讲解马尔科夫随机场的应用,加深对概率图模型的理解。为了便于说明,先引入计算机视觉中的部分概念。
1 图像分割问题
在图像处理与计算机视觉领域,图像分割(image segmentation)是在像素级别将一个完整图像划分为若干具有特定语义区域(region)或对象(object)的过程。每个分割区域是一系列拥有相似特征——例如颜色、强度、纹理等的像素集合,因此图像分割也可视为以图像属性为特征空间,为全体像素赋予标签的分类问题。
图像分割是高级图像处理的基础技术,它将原始冗余而繁杂的图像,转化为一种更具意义且简单紧凑的组织形式。在智能安防、卫星遥感、医学影像处理、生物特征识别等领域,图像分割通过提供精简且可靠的图像特征信息,有效地提高后续从而利于后续图像分析、理解等技术的计算效率,具有重要意义。

2 图像像素邻域
在图像分割中,通常默认图像中某像素点
p
(
i
,
j
)
p\left( i,j \right)
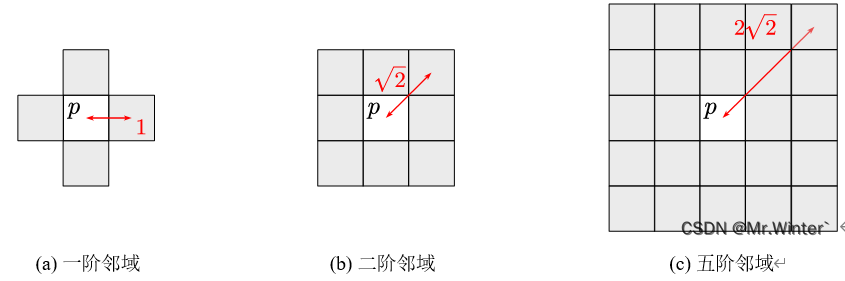
p(i,j)只受相邻像素的影响,较远处的像素对该像素没有作用,或者说其作用已被包含在相邻像素内
例如当前像素语义是天空,那么近邻像素也很可能表示天空。
形式化地,像素
p
p
p的邻域定义为
δ
d
(
p
)
=
{
q
∈
R
∣
d
i
s
t
(
p
,
q
)
⩽
d
,
d
∈
N
+
,
q
≠
p
}
\delta _d\left( p \right) =\left\{ q\in R|\mathrm{dist}\left( p,q \right) \leqslant \sqrt{d}, d\in \mathbb{N} ^+, q\ne p \right\}
δd(p)={q∈R∣dist(p,q)⩽d,d∈N+,q=p}
其中
d
i
s
t
(
⋅
,
⋅
)
\mathrm{dist}\left( \cdot ,\cdot \right)
dist(⋅,⋅)表示两个像素间的欧式距离,
d
d
d表示的是邻域的阶次,阶次越高像素包含的邻点越多,且满足当阶次
t
>
d
t>d
t>d时
δ
d
(
p
)
⊂
δ
t
(
p
)
\delta _d\left( p \right) \subset \delta _t\left( p \right)
δd(p)⊂δt(p)
这种邻域特性类似于马尔科夫链的无后效性,参考机器学习强基计划6-1:图文详细总结马尔科夫链及其性质(附例题分析)。由于图像是二维数据,因此用经典的无向图模型——马尔科夫随机场代替一维的马尔科夫链进行建模。马尔科夫随机场中的全局马尔科夫性、局部马尔科夫性和成对马尔科夫性,恰好表征了像素只受邻域影响的假设偏好。
3 观测场与标记场
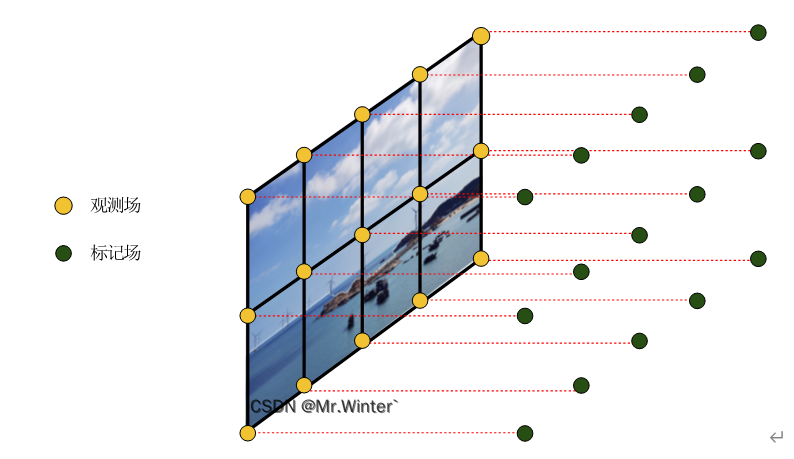
进行图像分割时,需要定义两个随机场:
- 观测场 Y Y Y:指肉眼可见的图像实际像素场
- 标记场 X X X:每个可观测像素都赋予一个标记,这些标记组成标记场。这两个随机场一一对应
形式化地,设观测场
Y
=
{
y
∣
y
∈
R
}
Y=\left\{ y|y\in R \right\}
Y={y∣y∈R}
其中
y
y
y是图像每个像素的真实取值。标记场
X
=
{
x
p
∣
p
∈
R
,
x
p
∈
R
}
X=\left\{ x_p|p\in R, x_p\in \mathcal{R} \right\}
X={xp∣p∈R,xp∈R}
其中
x
p
x_p
xp表示像素
p
p
p被赋予的分割区域,总共有
∣
R
∣
\left| \mathcal{R} \right|
∣R∣种可能的分割情形。
图像分割的目标是在已有观测图像的情况下,让标记场的概率最大,根据极大后验估计可得
X
=
a
r
g
max
X
P
(
X
∣
Y
)
=
a
r
g
max
X
P
(
X
)
P
(
Y
∣
X
)
=
a
r
g
max
X
(
ln
P
(
X
)
+
ln
P
(
Y
∣
X
)
)
\begin{aligned}X&=\mathrm{arg}\max _XP\left( X|Y \right) \\&=\mathrm{arg}\max _XP\left( X \right) P\left( Y|X \right) \\&=\mathrm{arg}\max _X\left( \ln P\left( X \right) +\ln P\left( Y|X \right) \right)\end{aligned}
X=argXmaxP(X∣Y)=argXmaxP(X)P(Y∣X)=argXmax(lnP(X)+lnP(Y∣X))
为了求解这个优化目标,分别对
P
(
X
)
P(X)
P(X)和
P
(
Y
∣
X
)
P(Y|X)
P(Y∣X)建模。
4 马尔科夫随机场建模
根据机器学习强基计划6-2:详细推导马尔科夫随机场(MRF)及其应用(附例题)的讲解,我们可以用马尔科夫随机场对联合分布
P
(
X
)
P(X)
P(X)建模,列出
P
(
X
)
=
1
Z
∗
∏
Q
∈
C
∗
ϕ
Q
(
D
Q
)
=
1
Z
∗
∏
Q
∈
C
∗
e
−
∑
u
,
v
∈
Q
,
u
≠
v
β
u
v
I
(
x
u
≠
x
v
)
P\left( X \right) =\frac{1}{Z^*}\prod_{Q\in \mathcal{C} ^*}{\phi _Q\left( \boldsymbol{D}_Q \right)}=\frac{1}{Z^*}\prod_{Q\in \mathcal{C} ^*}{e^{-\sum_{u,v\in Q,u\ne v}{\beta _{uv}\mathbb{I} \left( x_u\ne x_v \right)}}}
P(X)=Z∗1Q∈C∗∏ϕQ(DQ)=Z∗1Q∈C∗∏e−∑u,v∈Q,u=vβuvI(xu=xv)
这里令能量函数
H
Q
(
D
Q
)
=
∑
u
,
v
∈
Q
,
u
≠
v
β
u
v
I
(
x
u
≠
x
v
)
H_Q\left( \boldsymbol{D}_Q \right) =\sum_{u,v\in Q,u\ne v}{\beta _{uv}\mathbb{I} \left( x_u\ne x_v \right)}
HQ(DQ)=u,v∈Q,u=v∑βuvI(xu=xv)
称为Potts马尔科夫随机场,倾向于两个相邻像素取值相同,当相邻像素不等时,整体能量会上升,比如一个表示天空的蓝色像素,我们更倾向于和它属于同一类的像素都是蓝色的。
P
(
Y
∣
X
)
P(Y|X)
P(Y∣X)表示了像素与其标签的匹配程度,可用高斯分布建模
P
(
Y
∣
X
)
=
∏
y
∈
R
P
(
y
∣
x
y
)
=
∏
y
∈
R
1
2
π
σ
x
y
exp
[
−
(
y
−
μ
x
y
)
2
2
σ
x
y
2
]
P\left( Y|X \right) =\prod_{y\in R}{P\left( y|x_y \right)}=\prod_{y\in R}{\frac{1}{\sqrt{2\pi}\sigma _{x_y}}\exp \left[ -\frac{\left( y-\mu _{x_y} \right) ^2}{2\sigma _{x_y}^{2}} \right]}
P(Y∣X)=y∈R∏P(y∣xy)=y∈R∏2πσxy1exp[−2σxy2(y−μxy)2]
这里的均值和方差通过图像数据集训练得到,所以这个高斯概率模型就代表了通常意义下某个类的像素分布情况。比如说我们选择一百张标记好的图像,把这些图像中代表天空的像素进行累加,然后求平均就是这里的均值;方差同理
综合
P
(
X
)
P(X)
P(X)和
P
(
Y
∣
X
)
P(Y|X)
P(Y∣X),可以得到优化目标
X
=
a
r
g
max
X
P
(
X
∣
Y
)
=
a
r
g
max
X
P
(
X
)
P
(
Y
∣
X
)
=
a
r
g
max
X
(
ln
P
(
X
)
+
ln
P
(
Y
∣
X
)
)
=
a
r
g
min
X
[
∑
Q
∈
C
∗
∑
u
,
v
∈
Q
,
u
≠
v
β
u
v
I
(
x
u
≠
x
v
)
+
∑
y
∈
R
(
2
π
σ
x
y
+
(
y
−
μ
x
y
)
2
2
σ
x
y
2
)
]
\begin{aligned}X&=\mathrm{arg}\max _XP\left( X|Y \right) \\&=\mathrm{arg}\max _XP\left( X \right) P\left( Y|X \right) \\&=\mathrm{arg}\max _X\left( \ln P\left( X \right) +\ln P\left( Y|X \right) \right) \\&=\mathrm{arg}\min _X\left[ \sum_{Q\in \mathcal{C} ^*}{\sum_{u,v\in Q,u\ne v}{\beta _{uv}\mathbb{I} \left( x_u\ne x_v \right)}}+\sum_{y\in R}{\left( \sqrt{2\pi}\sigma _{x_y}+\frac{\left( y-\mu _{x_y} \right) ^2}{2\sigma _{x_y}^{2}} \right)} \right]\end{aligned}
X=argXmaxP(X∣Y)=argXmaxP(X)P(Y∣X)=argXmax(lnP(X)+lnP(Y∣X))=argXminQ∈C∗∑u,v∈Q,u=v∑βuvI(xu=xv)+y∈R∑(2πσxy+2σxy2(y−μxy)2)
用这个目标定义损失函数
U
(
X
)
=
∑
Q
∈
C
∗
∑
u
,
v
∈
Q
,
u
≠
v
β
u
v
I
(
x
u
≠
x
v
)
+
∑
y
∈
R
(
2
π
σ
x
y
+
(
y
−
μ
x
y
)
2
2
σ
x
y
2
)
U\left( X \right) =\sum_{Q\in \mathcal{C} ^*}{\sum_{u,v\in Q,u\ne v}{\beta _{uv}\mathbb{I} \left( x_u\ne x_v \right)}}+\sum_{y\in R}{\left( \sqrt{2\pi}\sigma _{x_y}+\frac{\left( y-\mu _{x_y} \right) ^2}{2\sigma _{x_y}^{2}} \right)}
U(X)=Q∈C∗∑u,v∈Q,u=v∑βuvI(xu=xv)+y∈R∑(2πσxy+2σxy2(y−μxy)2)
采用模拟退火等方法可以求得近似最优解。
5 Python实现
5.1 计算能量函数
能量函数的定义参加第四节的Potts马尔科夫随机场
def__calEnergy(self, label:int, index:tuple, img: np.ndarray, w: np.ndarray)->float:# get image's shape
channels =0try: rows, cols, channels = img.shape
except: rows, cols = img.shape
i, j = index
energy =0.0if channels:for c inrange(channels):
val = img[i][j][c]
mean, var = self.class_info[label][c][1], self.class_info[label][c][2]
energy += np.log(np.sqrt(2* np.pi * var))+((val - mean)**2)/(2* var)else:
val = img[i][j]
mean, var = self.class_info[label][0][1], self.class_info[label][0][2]
energy += np.log(np.sqrt(2* np.pi * var))+((val - mean)**2)/(2* var)# clique energy(Potts model)
neighbor =[[0,1],[0,-1],[1,0],[-1,0]]for dx, dy in neighbor:if0<= i + dx < rows and0<= j + dy < cols:
energy = energy + self.beta_ if label == w[i + dx][j + dy]else energy
return energy
5.2 退火优化
while(iteration <500):# try new label
x, y = random.randint(0, rows -1), random.randint(0, cols -1)
labels =[i for i inrange(len(self.class_info))]
labels.remove(w[x][y])
new_label = labels[random.randint(0,len(labels)-1)]# delta energy between old label and new label
delta = self.__calEnergy(new_label,(x, y), img, w)- self.__calEnergy(w[x][y],(x, y), img, w)if(delta <=0):
w[i][j]= new_label
energy += delta
else:
p =-delta / current_temp
if random.uniform(0,1)< p:
w[i][j]= new_label
current_energy += delta
current_temp *=0.95
iteration +=1
5.3 效果展示
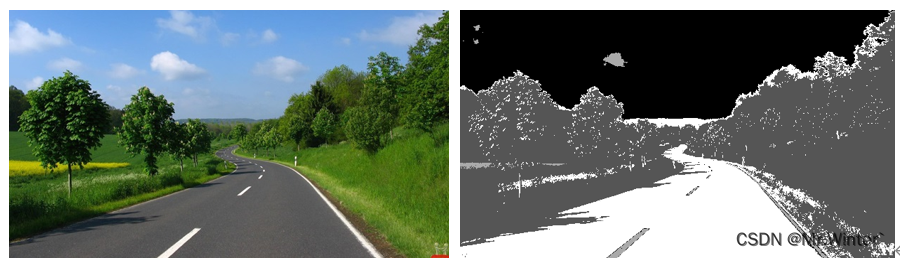
本文完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《机器人原理与技术》
- 《机器学习强基计划》
- 《计算机视觉教程》
- …
👇源码获取 · 技术交流 · 抱团学习 · 咨询分享 请联系👇
版权归原作者 Mr.Winter` 所有, 如有侵权,请联系我们删除。