
文章目录
前言
参考了一些大佬的文章,整理了一下相机标定和双目标定的原理和推导。
一、相机标定
摄像机成像就是空间场景投影至二维图像平面的空间变换过程。摄像机标定的要解决两个问题:首先确定三维空间点与像素平面像素点间的转换关系,即求解相机内外参;然后确定相机成像过程中的畸变系数,用于图像矫正,因此摄像机标定的参数包括:相机内部参数,外部参数以及畸变参数。
另外仅仅利用单目相机标定的结果,是无法直接从像素坐标转化到物理坐标的,因为透视投影丢失了一个维度的坐标,所以测距其实需要双目相机。
1.相机的四个坐标系
相机成像系统中,共包含四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。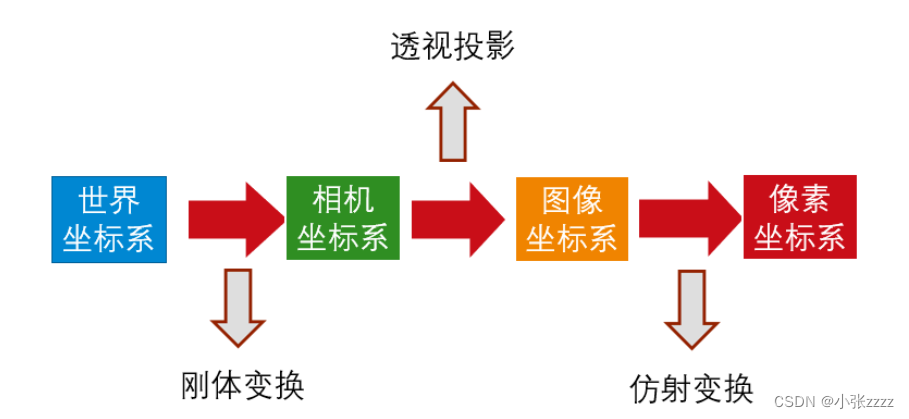
在一些其他文章中均有说明这四个坐标系分别是什么意思,推荐大家看一下这几位博主的文章,非常有收获。
立体视觉入门指南(1):坐标系与相机参数
相机标定之张正友标定法数学原理详解(含python源码)
相机标定、双目相机标定(原理)、三维重建效果展示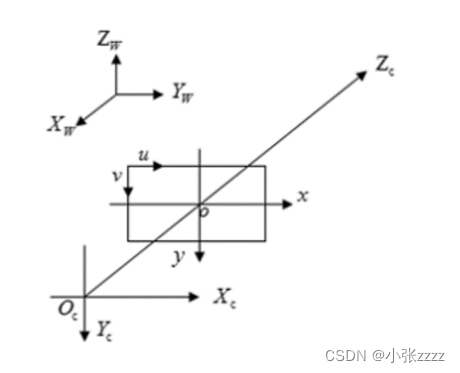 世界坐标系:Xw、Yw、Zw。
世界坐标系:Xw、Yw、Zw。
相机坐标系: Xc、Yc、Zc。
图像坐标系:x、y。
像素坐标系:u、v。
其中,相机坐标系的Z轴与光轴重合,且垂直于图像坐标系平面并通过图像坐标系的原点,相机坐标系与图像坐标系之间的距离为焦距f。像素坐标系平面u-v和图像坐标系平面x-y重合,但像素坐标系原点位于图中左上角。
世界坐标系到像素坐标系转换的全过程: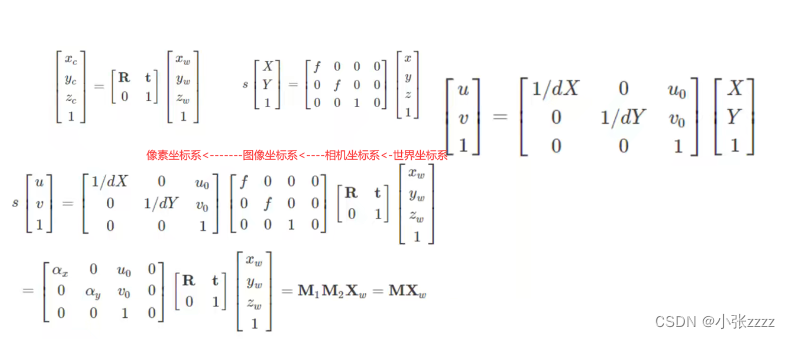
这里要说明一下几个问题:
1、外参R、T ,也就是世界坐标系到相机坐标系,要6个自由度,除了旋转还要进行平移。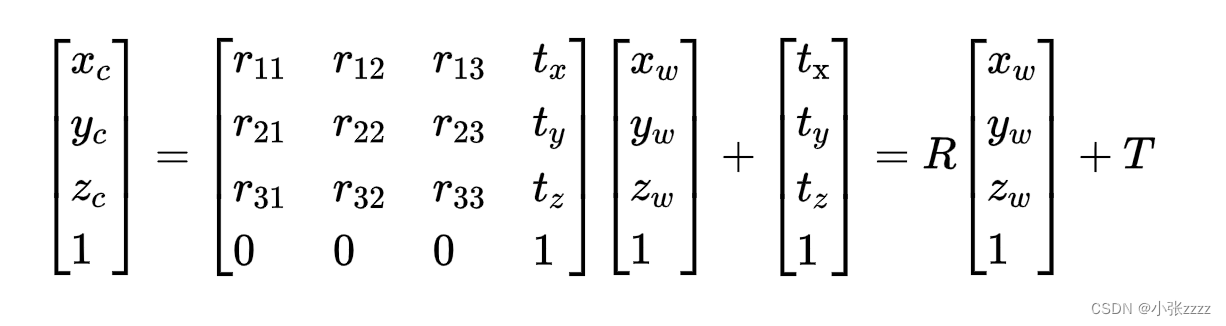
2、s为比例因子(s不为0),f为有效焦距(光心到图像平面的距离)。相机坐标系转图像坐标系就是等比例缩放的过程。
3、a= f/dX、ay= f/dY,称为u、v轴的尺度因子,M1称为相机的内部参数矩阵,M2称为相机的外部参数矩阵,M称为投影矩阵。
2.相机的畸变
相机拍摄的图片还存在一定的畸变,畸变包括桶形畸变和枕形畸变。在我的这篇文章中有解释和畸变矫正opencv-python光学畸变校准
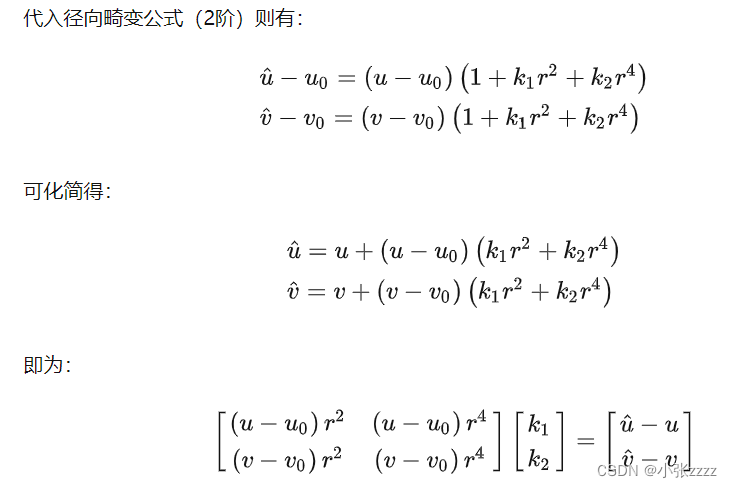
径向畸变公式(3阶)如下: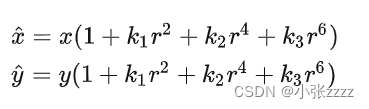
切向畸变公式如下: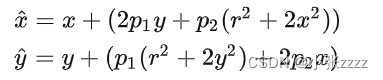
相机标定的第二个目的就是获得相机的畸变参数,如上式中的K1,K2,K3,P1,P2 等,进而对拍摄的图片进行去畸变处理。
二、张正友标定法
原文我已经帮大家下载好了,直接获取就可以了。链接:https://pan.baidu.com/s/1wp-GmVuc3CTyRXYX1V7aBQ
提取码:8owo
张正友标定法标定相机的内外参数的思路如下:
1)求解内参矩阵与外参矩阵的积;
2)求解内参矩阵;
3)求解外参矩阵。
1.求解内参矩阵与外参矩阵的积
张正友标定法将世界坐标系固定于棋盘格上,则棋盘格上任一点的物理坐标 W=0 ,因此,原单点无畸变的成像模型可以化为下式。其中, R1,R2为旋转矩阵R的前两列。为了简便,将内参矩阵记为 A。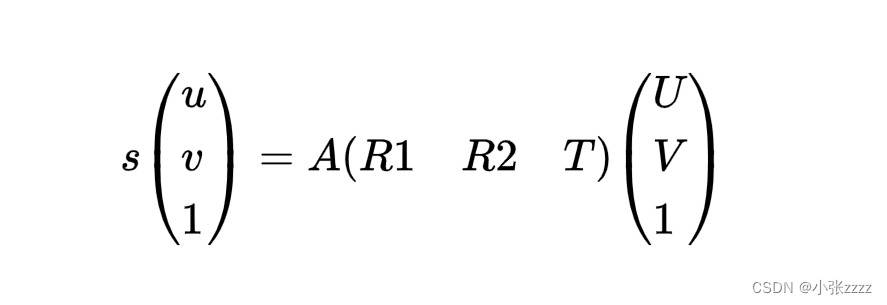
注:对于不同的图片,内参矩阵A为定值;对于同一张图片,内参矩阵A,外参矩阵(R1 R2 T)为定值;对于同一张图片上的单点,内参矩阵A,外参矩阵(R1 R2 T) ,尺度因子s为定值。
我们将内参矩阵A和外参矩阵(R1 R2 T)的积记为矩阵H,H即为单应矩阵,则有: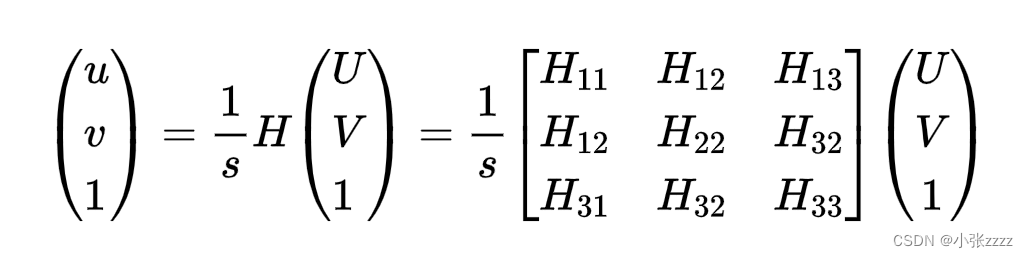

尺度因子 s可以消掉,这里的H是齐次矩阵,有8个独立未知元素。每一个标定板角点可以提供两个约束方程的对应关系。因此,当一张图片上的标定板角点数量等于4时,即可求得该图片对应的矩阵 。
以上只是理论推导,在真实的应用场景中,我们计算的点对中都会包含噪声。比如点的位置偏差几个像素,甚至出现特征点对误匹配的现象,如果只使用4个点对来计算单应矩阵,那会出现很大的误差。因此,为了使得计算更精确,一般都会使用远大于4个点对来计算单应矩阵。另外上述方程组采用直接线性解法通常很难得到最优解,所以实际使用中一般会用其他优化方法,如奇异值分解、Levenberg-Marquarat(LM)算法。
2.求解内参矩阵
求出来的单应矩阵H是内参矩阵和外参矩阵的混合体,而我们想要最终分别获得内参和外参,所以需要先求内参或者先求外参。先求内参是因为更容易,因为每张图片的内参都是固定的,而外参是变化的。最后求得如下,具体可以参考大佬的推导相机标定之张正友标定法数学原理详解(含python源码)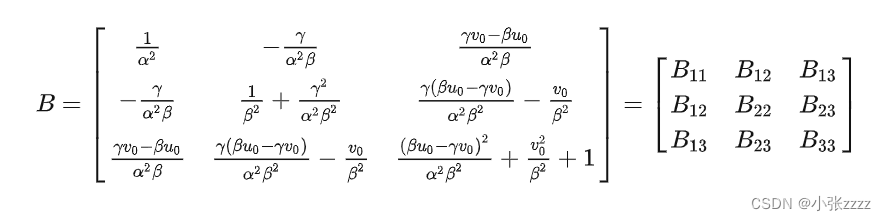
最后可根据对应关系求出结果。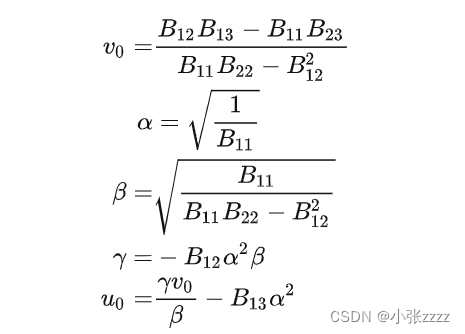
3.求解外参矩阵
上面我们已经求导了单应矩阵H和内参矩阵A,自然就可以求得每一张图片对应的外参矩阵(R1 R2 T)。
注:这里值得指出,完整的外参矩阵为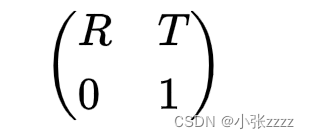
但是,由于张正友标定板将世界坐标系的原点选取在棋盘格上,则棋盘格上任一点的物理坐标W=0 ,将旋转矩阵的R的第三列 R3消掉,因此,R3在坐标转化中并没有作用。但是 要使得 R3满足旋转矩阵R的性质,即列与列之间单位正交,因此可以通过向量 R1,R2的叉乘,即R1 X R2 = R3 ,计算得到R3。
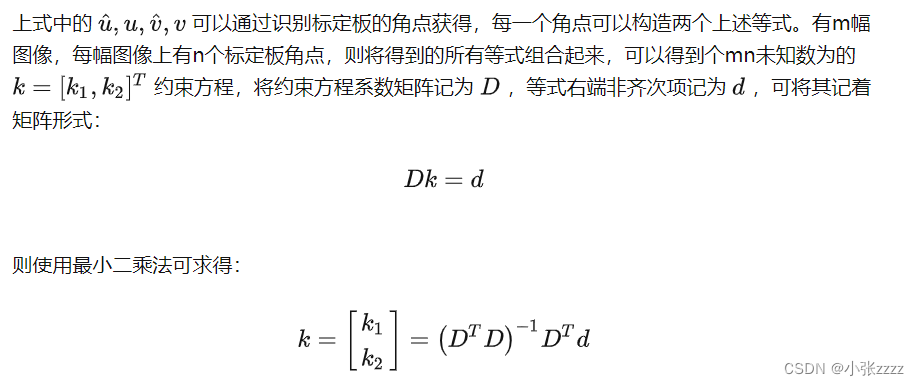
4.标定相机的畸变参数
畸变后的像素坐标为u^v^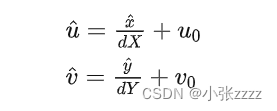
此处也是参考了大佬的推导,建议大家都看一下,非常推荐!
5.双目标定
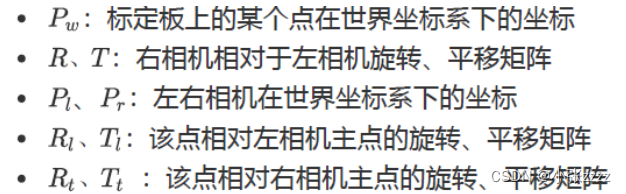
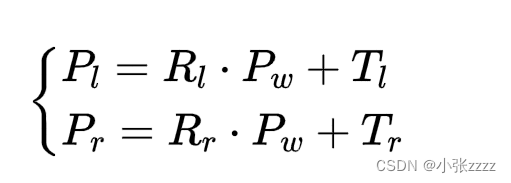
通过 P = R X Pl + T可以推出: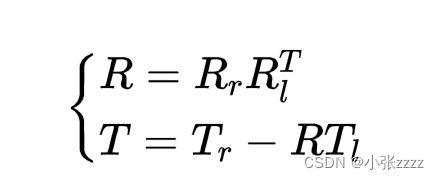
需要说明的是,无论是Rl、Rr、Tl、Tr,这些在我们单目标定的时候都已经获得过了,opencv单目标定函数中,除了返回我们相机内参、畸变系数外,相机相对于标定物的旋转、平移矩阵也一并返回了,我们可以直接可以用。
6.极线矫正(立体校正)
之前写的文章里面有介绍极线矫正opencv-python立体匹配(极线校正)
立体校正的目的就是,利用立体标定所获得的参数将实际非共面行对准的两幅图像,校正成共面行对准。
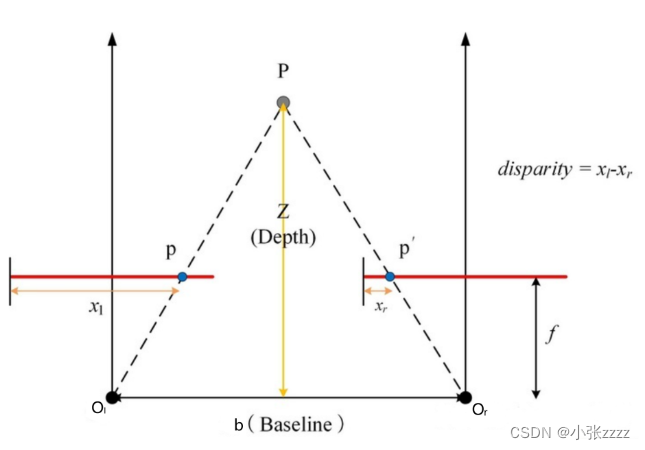
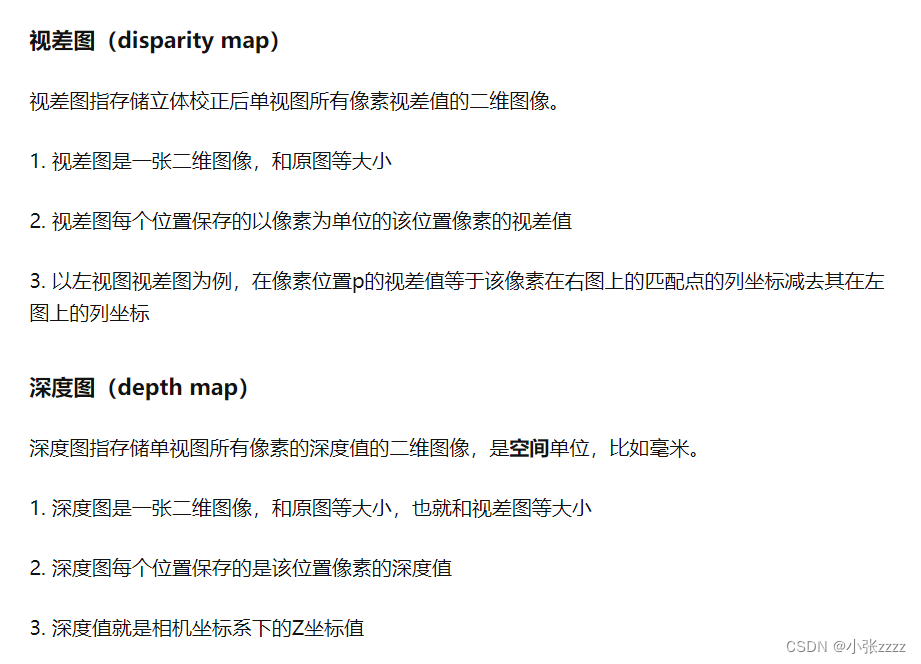
三、视差图与深度图
引用大佬的文章立体匹配入门指南(8):视差图、深度图、点云
通过三角形相似可得出:
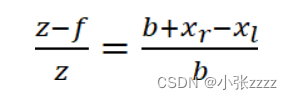
故
其中,Z为深度,d为视差,b为基线长度,f为焦距(像素单位),xr和xl分别为左右视图主点的列坐标。
注:视差图中存的是视差d,深度图中存的是深度Z。
版权归原作者 小张Tt 所有, 如有侵权,请联系我们删除。