
这次分享的是yolov3中的**3.0**版本,主要是因为其中使用的一些训练技巧不多,方便入门,在最新版本中作者使用了很多yolov5的训练技巧,不好理解,所以我们从最初版本一步一步学。在看源码之前建议大家对yolov3的原理学习一下可以对源码理解更简单,对理论会更深刻。
**yolov3博客地址**:YOLOv3论文笔记_crlearning的博客-CSDN博客
**源码地址**:GitHub - ultralytics/yolov3 at v3.0
学习一个项目源码,第一步对其项目目录进行了解,其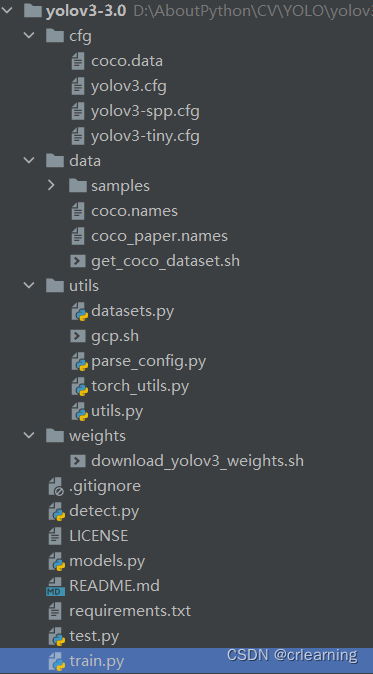次看主文件,在进入主函数中逐行调试,进而对代码全局有个了解。cfg文件夹存放yolo的配置文件主要是模型的配置,如卷积大小等。data中存放数据文件,数据集等。utils文件夹中包括自己写的一些工具包,比如对数据集进行处理提取、对box进行解码。weights中存放模型权值文件。接下来就是主文件,train.py训练文件、test.py测试文件(用于训练中每个epoch的测试)、models.py模型文件、detect.py预测文件、requirements.txt其中是项目需要的环境配置。
了解了项目基本结构之后,现在进入到train文件当中,一般的项目都是直接从train.py开始看,首先看到train中的main函数:
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--epochs', type=int, default=270, help='number of epochs')
parser.add_argument('--batch-size', type=int, default=16, help='size of each image batch')
# 在n个bacth后更新一次梯度
parser.add_argument('--accumulate', type=int, default=1, help='accumulate gradient x batches before optimizing')
parser.add_argument('--cfg', type=str, default='cfg/yolov3.cfg', help='cfg file path')
parser.add_argument('--data-cfg', type=str, default='cfg/coco.data', help='coco.data file path')
# 多尺度训练,输入图片不固定(在命令行加入--multi-scale就可以用)
parser.add_argument('--multi-scale', action='store_true', help='random image sizes per batch 320 - 608')
# 默认输入图片416
parser.add_argument('--img-size', type=int, default=32 * 13, help='pixels')
# 恢复训练,如果中止训练,使用这个可以接着训练
parser.add_argument('--resume', action='store_true', help='resume training flag')
opt = parser.parse_args()
print(opt, end='\n\n')
# 固定随机种子,使得每次运行的随机值一样,训练和验证集会固定,方便比较模型
init_seeds()
train(
opt.cfg,
opt.data_cfg,
img_size=opt.img_size,
resume=opt.resume,
epochs=opt.epochs,
batch_size=opt.batch_size,
accumulate=opt.accumulate,
multi_scale=opt.multi_scale,
)
首先是传入参数,每个参数的含义可以看我写的注释,然后进入到train函数
def train(
cfg,
data_cfg,
img_size=416,
resume=False,
epochs=270,
batch_size=16,
accumulate=1,
multi_scale=False,
freeze_backbone=False,
):
# os.sep就是 斜杠/
weights = 'weights' + os.sep
latest = weights + 'latest.pt'
best = weights + 'best.pt'
# 选择是GPU还是CPU
device = torch_utils.select_device()
if multi_scale:
img_size = 608 # initiate with maximum multi_scale size
else:
# 如果尺度不变,使用benchmark可以增加运行效率
torch.backends.cudnn.benchmark = True # unsuitable for multiscale
# 训练集路径
train_path = parse_data_cfg(data_cfg)['train']
# 初始化模型
model = Darknet(cfg, img_size)
# 加载数据集
dataloader = LoadImagesAndLabels(train_path, batch_size, img_size, augment=True)
# dataloader = torch.utils.data.DataLoader(dataloader, batch_size=batch_size, num_workers=0)
# 初始学习步长
lr0 = 0.001
# 这个参数表示backbone有多少层,方便冻结训练
cutoff = -1
start_epoch = 0
best_loss = float('inf')
下面是否使用恢复训练:
# 使用中断恢复训练(一般用不到)
if resume:
checkpoint = torch.load(latest, map_location='cpu')
# 加载要继续的模型权重
model.load_state_dict(checkpoint['model'])
# 设置优化器
optimizer = torch.optim.SGD(filter(lambda x: x.requires_grad, model.parameters()), lr=lr0, momentum=.9)
start_epoch = checkpoint['epoch'] + 1
if checkpoint['optimizer'] is not None:
optimizer.load_state_dict(checkpoint['optimizer'])
best_loss = checkpoint['best_loss']
del checkpoint # current, saved
下面是从零开始训练:
else:
# 初始化模型
if cfg.endswith('yolov3.cfg'):
cutoff = load_darknet_weights(model, weights + 'darknet53.conv.74')
elif cfg.endswith('yolov3-tiny.cfg'):
cutoff = load_darknet_weights(model, weights + 'yolov3-tiny.conv.15')
# 设置优化器
optimizer = torch.optim.SGD(model.parameters(), lr=lr0, momentum=.9)
是否是有多GPU:
# 多GPU训练
if torch.cuda.device_count() > 1:
model = nn.DataParallel(model)
model.to(device).train()
# 设置学习步长优化器
# scheduler = torch.optim.lr_scheduler.MultiStepLR(optimizer, milestones=[54, 61], gamma=0.1)
上面的参数配置完成后,可以开始训练:
# 调整学习步长,对前1000个batch进行学习了warm up
n_burnin = min(round(len(dataloader) / 5 + 1), 1000)
for epoch in range(epochs):
model.train()
epoch += start_epoch
print(('\n%8s%12s' + '%10s' * 7) % (
'Epoch', 'Batch', 'xy', 'wh', 'conf', 'cls', 'total', 'nTargets', 'time'))
# 自动更新学习步长
# scheduler.step()
# 手动更新学习步长
if epoch > 250:
lr = lr0 / 10
else:
lr = lr0
for x in optimizer.param_groups:
x['lr'] = lr
# 如果使用冻结训练,第一个epoch规定backbone
if freeze_backbone and epoch < 2:
for i, (name, p) in enumerate(model.named_parameters()):
# cutoff就是backbone的层数,小于就属于backbone
if int(name.split('.')[1]) < cutoff: # if layer < 75
p.requires_grad = False if (epoch == 0) else True
下面为每个epoch训练步骤:
ui = -1
rloss = defaultdict(float)
for i, (imgs, targets, _, _) in enumerate(dataloader):
targets = targets.to(device)
# 取出的个数,targets维度[batch_size, 1]
nT = targets.shape[0]
if nT == 0: # if no targets continue
continue
# SGD burn-in
# 学习步长前1000个使用warm up
if (epoch == 0) and (i <= n_burnin):
lr = lr0 * (i / n_burnin) ** 4
for x in optimizer.param_groups:
x['lr'] = lr
# 使用模型跑出训练结果
pred = model(imgs.to(device))
# 对GT标签进行处理
target_list = build_targets(model, targets, pred)
# 计算loss
loss, loss_dict = compute_loss(pred, target_list)
# 反向传播计算梯度
loss.backward()
# 累加accumulate个batchs在对梯度进行优化
if (i + 1) % accumulate == 0 or (i + 1) == len(dataloader):
optimizer.step()
optimizer.zero_grad()
# 计算每个epoch的loss均值,大家可以推到一下
ui += 1
for key, val in loss_dict.items():
rloss[key] = (rloss[key] * ui + val) / (ui + 1)
# 打印相关的训练信息
s = ('%8s%12s' + '%10.3g' * 7) % (
'%g/%g' % (epoch, epochs - 1),
'%g/%g' % (i, len(dataloader) - 1),
rloss['xy'], rloss['wh'], rloss['conf'],
rloss['cls'], rloss['total'],
nT, time.time() - t0)
t0 = time.time()
print(s)
# Multi-Scale training (320 - 608 pixels) 每10 batches改变一次imgsize
if multi_scale and (i + 1) % 10 == 0:
dataloader.img_size = random.choice(range(10, 20)) * 32
print('multi_scale img_size = %g' % dataloader.img_size)
最后对每个结果进行处理,保存权值文件:
# 将最低的loss记录下来
if rloss['total'] < best_loss:
best_loss = rloss['total']
# 保存训练模型
save = True
if save:
# Save latest checkpoint
checkpoint = {'epoch': epoch,
'best_loss': best_loss,
'model': model.module.state_dict() if type(model) is nn.DataParallel else model.state_dict(),
'optimizer': optimizer.state_dict()}
torch.save(checkpoint, latest)
# Save best checkpoint
if best_loss == rloss['total']:
os.system('cp ' + latest + ' ' + best)
# 每5个epoch保存一次
if (epoch > 0) and (epoch % 5 == 0):
os.system('cp ' + latest + ' ' + weights + 'backup{}.pt'.format(epoch))
# 计算 mAP
with torch.no_grad():
P, R, mAP = test.test(cfg, data_cfg, weights=latest, batch_size=batch_size, img_size=img_size, model=model)
# 将每轮epoch的结果保存到txt中
with open('results.txt', 'a') as file:
file.write(s + '%11.3g' * 3 % (P, R, mAP) + '\n')
以上就是整个train的训练文件,后续有需要会继续更新其中其他重要文件
本文转载自: https://blog.csdn.net/weixin_44711102/article/details/127667616
版权归原作者 crlearning 所有, 如有侵权,请联系我们删除。
版权归原作者 crlearning 所有, 如有侵权,请联系我们删除。