
目录
1.模板匹配的定义
模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域,该匹配方法并不是基于直方图,而是使用一个图像块在输入图像上进行“”滑动“”。(也就是在图像上按照模板大小一块一块比对)
2.API介绍
void cv::matchTemplate(
cv::InputArray image //需要匹配的图像
cv::InputArray temp //模板图像
cv::OutArray result //存储的计算得到的结果
int method //匹配的方法
)
对于该算子需要注意的有两点:
1.result是存储匹配的结果,对于它的定义为单通道的大小为(image.width-temp.width+1,image.height-temp.height+1),也就是原图的大小裁去temple模板的宽高,不过其定义rows和cols需要交换位置(正常图像Mat定义先rows后cols),同时数据类型可以是CV_8UC1或者CV_32FC1。具体定义如下:
Mat result(image.cols-temp.cols+1,image.rows-temp.rows+1,CV_32FC1)
2.匹配方法介绍
cv::TM_SQDIFF==0(方差匹配法)
cv::TM_SQDIFF_NORMED==1(归一方差匹配法)
cv::TM_CCORR==2(相关性匹配方法)
cv::TM_CCORR_NORMED==3(归一化的互相关匹配法)
cv::TM_CCOEFF==4(相关系数匹配法)
cv::TM_CCOEFF_NORMED==5(归一化相关系数匹配方法)
对于前两种方差匹配方法0和1,完全匹配后值为0,不匹配值很大(值越小,匹配效果越好)。
对于中间两种相关匹配方法2和3,完全匹配后值很大,不匹配时值很小,接近于0。(值越大,匹配效果越好)。
对于最后两种相关系数匹配方法4和5,完全匹配会得到1,完全误匹配会得到-1。(分值介于-1-1,值越大,匹配效果越好)。
3.寻找最优匹配位置(匹配后的配套操作)
1.cv::normalize 归一化,在同样的代码中选择不同的匹配方法,其result值的结果也不一致,通过归一化算子中cv::NORM_MINMAX方向可以将各点的匹配结果线性映射到0-1之间。
2.cv::minMaxLoc()最小和最大点查找,通过该算子可以将result中结果进行查找,找到分数最小最大值和其在result中的位置。
4.具体代码
#include<iostream>
#include<opencv2\opencv.hpp>
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
using namespace std;
using namespace cv;
#define WINDOW_NAME1 "【原始图片】"
#define WINDOW_NAME2 "【效果窗口】"
//定义全局变量
Mat g_srcImage, g_templateImage, g_resultImage;
int g_nMatchmethod;
int g_nMatTrackbarNum = 5;
//定义全局函数
void on_Matching(int, void*);
int main(int argc,char** argv)
{
//【1】载入原图像和模块板
g_srcImage = imread("E:\\进度\\11-16\\模板匹配\\1.jpg",1);
g_templateImage = imread("E:\\进度\\11-16\\模板匹配\\2.jpg",1);
//【2】创建窗口
namedWindow(WINDOW_NAME1,WINDOW_AUTOSIZE);
namedWindow(WINDOW_NAME2, WINDOW_AUTOSIZE);
//【3】创建滑动条并进行初始化
createTrackbar("方法",WINDOW_NAME1,&g_nMatchmethod,g_nMatTrackbarNum,on_Matching);
on_Matching(0,0);
waitKey(0);
return 0;
}
//回调函数
void on_Matching(int, void*)
{
//【1】 给局部变量初始化
Mat srcImage;
g_srcImage.copyTo(srcImage);
//【2】初始化用于结果输出的矩阵
int resultImage_cols = g_srcImage.cols - g_templateImage.cols + 1;
int resultImage_rows = g_srcImage.rows - g_templateImage.rows + 1;
g_resultImage.create(resultImage_cols,resultImage_rows,CV_32FC1);
//【3】进行模板匹配
matchTemplate(g_srcImage,g_templateImage,g_resultImage,g_nMatchmethod);
normalize(g_resultImage,g_resultImage,0,1,NORM_MINMAX);
//【4】通过函数minMaxLoc 定位最匹配的位置
double minvalue, maxValue;
Point minLocation, maxLocation, MatLocation;
minMaxLoc(g_resultImage,&minvalue,&maxValue,&minLocation,&maxLocation);
//【5】对于方法SQDIFF和SQDIFF_NORMED越小值有着更高的匹配结果,而其余的方法,数值越大匹配效果越好。
if (g_nMatchmethod == TM_SQDIFF || g_nMatchmethod == TM_SQDIFF_NORMED)
{
MatLocation = minLocation;
}
else
{
MatLocation = maxLocation;
}
//【6】绘制出矩阵,并显示最终结果
rectangle(srcImage, MatLocation, Point(MatLocation.x + g_templateImage.cols, MatLocation.y + g_templateImage.rows), Scalar(0, 0, 255), 2, 16);
rectangle(g_resultImage, MatLocation, Point(MatLocation.x + g_templateImage.cols, MatLocation.y + g_templateImage.rows), Scalar(0, 0, 255), 2, 16);
imshow(WINDOW_NAME1,srcImage);
imshow(WINDOW_NAME2,g_resultImage);
}
运行结果如下图:
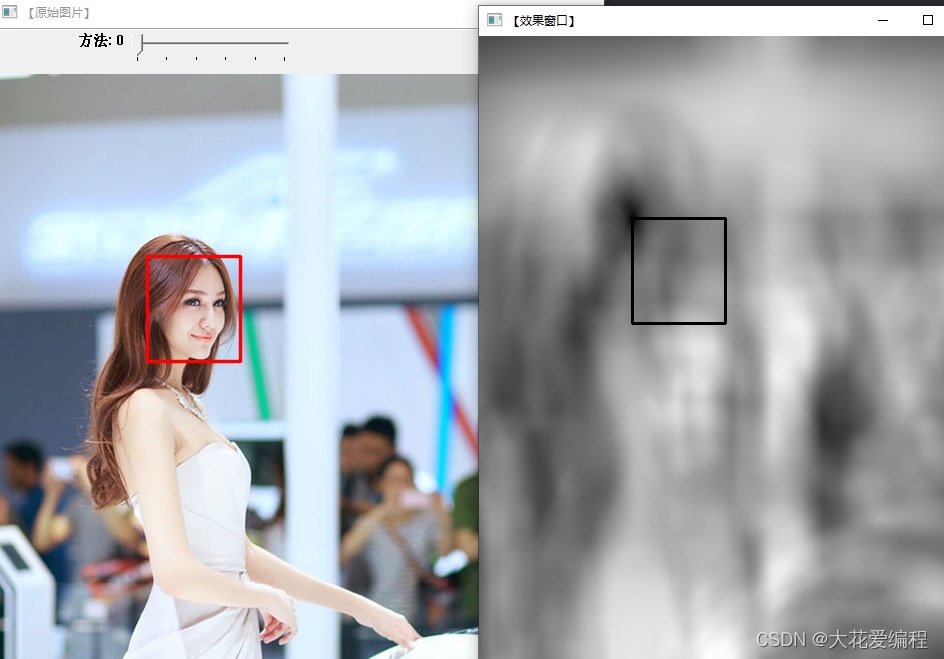
通过对匹配方法的各个结果对比发现,归一化的匹配方法(2和3)在大多数情况下都会有好的结果,特别是室外环境的图像。相关系数方法的匹配效果更好,但是计算时间代价高。在实际的应用中,尤其是通过摄像头进行自动部件的检测或者特征跟踪,应该尝试使用所有的方法,从中找到一个同时兼顾效率和准确率的方法。
版权归原作者 大花爱编程 所有, 如有侵权,请联系我们删除。