
1.ASFF介绍

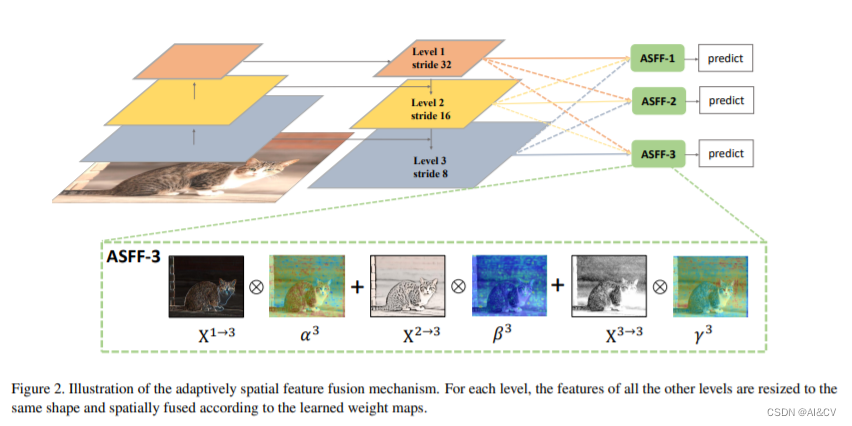
Learning Spatial Fusion for Single-Shot Object Detection
论文地址:https://arxiv.org/pdf/1911.09516v2.pdf
多尺度特征特别是特征金字塔FPN是解决目标检测中跨尺度目标的最常用有效的解决方法,但是不同特征尺度中存在的不一致性限制了(基于特征金字塔的)single-shot检测器的性能。本文提出一种特征金字塔融合方法ASFF,它自动学习去抑制不同尺度特征在融合时空间上可能存在不一致;
2.ASFF加入Yolov5提升检测精度
2.1 ASFF加入**
common.py
**中:
class ASFFV5(nn.Module):
def __init__(self, level, multiplier=1, rfb=False, vis=False, act_cfg=True):
"""
ASFF version for YoloV5 .
different than YoloV3
multiplier should be 1, 0.5
which means, the channel of ASFF can be
512, 256, 128 -> multiplier=1
256, 128, 64 -> multiplier=0.5
For even smaller, you need change code manually.
"""
super(ASFFV5, self).__init__()
self.level = level
self.dim = [int(1024 * multiplier), int(512 * multiplier),
int(256 * multiplier)]
# print(self.dim)
self.inter_dim = self.dim[self.level]
if level == 0:
self.stride_level_1 = Conv(int(512 * multiplier), self.inter_dim, 3, 2)
self.stride_level_2 = Conv(int(256 * multiplier), self.inter_dim, 3, 2)
self.expand = Conv(self.inter_dim, int(
1024 * multiplier), 3, 1)
elif level == 1:
self.compress_level_0 = Conv(
int(1024 * multiplier), self.inter_dim, 1, 1)
self.stride_level_2 = Conv(
int(256 * multiplier), self.inter_dim, 3, 2)
self.expand = Conv(self.inter_dim, int(512 * multiplier), 3, 1)
elif level == 2:
self.compress_level_0 = Conv(
int(1024 * multiplier), self.inter_dim, 1, 1)
self.compress_level_1 = Conv(
int(512 * multiplier), self.inter_dim, 1, 1)
self.expand = Conv(self.inter_dim, int(
256 * multiplier), 3, 1)
# when adding rfb, we use half number of channels to save memory
compress_c = 8 if rfb else 16
self.weight_level_0 = Conv(
self.inter_dim, compress_c, 1, 1)
self.weight_level_1 = Conv(
self.inter_dim, compress_c, 1, 1)
self.weight_level_2 = Conv(
self.inter_dim, compress_c, 1, 1)
self.weight_levels = Conv(
compress_c * 3, 3, 1, 1)
self.vis = vis
def forward(self, x): # l,m,s
"""
# 128, 256, 512
512, 256, 128
from small -> large
"""
x_level_0 = x[2] # l
x_level_1 = x[1] # m
x_level_2 = x[0] # s
# print('x_level_0: ', x_level_0.shape)
# print('x_level_1: ', x_level_1.shape)
# print('x_level_2: ', x_level_2.shape)
if self.level == 0:
level_0_resized = x_level_0
level_1_resized = self.stride_level_1(x_level_1)
level_2_downsampled_inter = F.max_pool2d(
x_level_2, 3, stride=2, padding=1)
level_2_resized = self.stride_level_2(level_2_downsampled_inter)
elif self.level == 1:
level_0_compressed = self.compress_level_0(x_level_0)
level_0_resized = F.interpolate(
level_0_compressed, scale_factor=2, mode='nearest')
level_1_resized = x_level_1
level_2_resized = self.stride_level_2(x_level_2)
elif self.level == 2:
level_0_compressed = self.compress_level_0(x_level_0)
level_0_resized = F.interpolate(
level_0_compressed, scale_factor=4, mode='nearest')
x_level_1_compressed = self.compress_level_1(x_level_1)
level_1_resized = F.interpolate(
x_level_1_compressed, scale_factor=2, mode='nearest')
level_2_resized = x_level_2
# print('level: {}, l1_resized: {}, l2_resized: {}'.format(self.level,
# level_1_resized.shape, level_2_resized.shape))
level_0_weight_v = self.weight_level_0(level_0_resized)
level_1_weight_v = self.weight_level_1(level_1_resized)
level_2_weight_v = self.weight_level_2(level_2_resized)
# print('level_0_weight_v: ', level_0_weight_v.shape)
# print('level_1_weight_v: ', level_1_weight_v.shape)
# print('level_2_weight_v: ', level_2_weight_v.shape)
levels_weight_v = torch.cat(
(level_0_weight_v, level_1_weight_v, level_2_weight_v), 1)
levels_weight = self.weight_levels(levels_weight_v)
levels_weight = F.softmax(levels_weight, dim=1)
fused_out_reduced = level_0_resized * levels_weight[:, 0:1, :, :] + \
level_1_resized * levels_weight[:, 1:2, :, :] + \
level_2_resized * levels_weight[:, 2:, :, :]
out = self.expand(fused_out_reduced)
if self.vis:
return out, levels_weight, fused_out_reduced.sum(dim=1)
else:
return out
# ------------------------------------asff -----end--------------------------------
2.2 ASFF加入**
yolo.py
**中:
class ASFF_Detect(nn.Module): # add ASFFV5 layer and Rfb
stride = None # strides computed during build
onnx_dynamic = False # ONNX export parameter
export = False # export mode
def __init__(self, nc=80, anchors=(), ch=(), multiplier=0.5, rfb=False, inplace=True): # detection layer
super().__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
self.l0_fusion = ASFFV5(level=0, multiplier=multiplier, rfb=rfb)
self.l1_fusion = ASFFV5(level=1, multiplier=multiplier, rfb=rfb)
self.l2_fusion = ASFFV5(level=2, multiplier=multiplier, rfb=rfb)
self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
self.inplace = inplace # use in-place ops (e.g. slice assignment)
def forward(self, x):
z = [] # inference output
result = []
result.append(self.l2_fusion(x))
result.append(self.l1_fusion(x))
result.append(self.l0_fusion(x))
x = result
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, -1, self.no))
return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
d = self.anchors[i].device
t = self.anchors[i].dtype
shape = 1, self.na, ny, nx, 2 # grid shape
y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
if torch_1_10: # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility
yv, xv = torch.meshgrid(y, x, indexing='ij')
else:
yv, xv = torch.meshgrid(y, x)
grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
# print(anchor_grid)
return grid, anchor_grid
class DetectionModel(BaseModel):下加入 (PS:建议直接搜索Detect关键词)
m = self.model[-1] # Detect()
if isinstance(m, (Detect, Segment,ASFF_Detect)):
def parse_model(d, ch): # model_dict, input_channels(3)
# TODO: channel, gw, gd
elif m in {Detect, Segment,ASFF_Detect}:
args.append([ch[x] for x in f])
class BaseModel(nn.Module):
def _apply(self, fn):
# Apply to(), cpu(), cuda(), half() to model tensors that are not parameters or registered buffers
self = super()._apply(fn)
m = self.model[-1] # Detect()
if isinstance(m, (Detect, Segment,ASFF_Detect)):
2.3 修改yolov5s_asff.yaml
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 1 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, ASFF_Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
2.4 与cbam结合 进一步提升检测精度
cbam介绍:https://blog.csdn.net/m0_63774211/article/details/129611391
# Parameters
nc: 1 # number of classes
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
# anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, CBAM, [1024]], #9
[-1, 1, SPPF, [1024, 5]], #10
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 14
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 18 (P3/8-small)
[-1, 1, CBAM, [256]], #19
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 22 (P4/16-medium)
[-1, 1, CBAM, [512]],
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 25 (P5/32-large)
[-1, 1, CBAM, [1024]],
[[19, 23, 27], 1, ASFF_Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
本文转载自: https://blog.csdn.net/m0_63774211/article/details/129619356
版权归原作者 AI&CV 所有, 如有侵权,请联系我们删除。
版权归原作者 AI&CV 所有, 如有侵权,请联系我们删除。